|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛАВведение
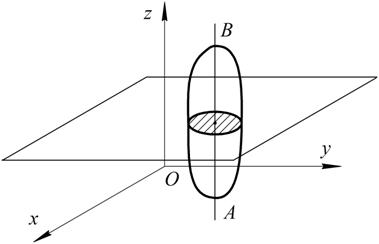
Движение твердого тела называется плоским, или плоскопараллельным, если все точки тела перемещаются в плоскостях, параллельных некоторой неподвижной плоскости (рис. 2.19). Рис. 2.19
Рассмотрим произвольное плоское движение твердого тела (рис. 2.20). Пусть все точки тела перемещаются в плоскостях, параллельных плоскости Оху.
Рис. 2.20
Из определения плоского движения и свойств твердого тела (углы между прямыми, фиксированными в твердом теле, сохраняются неизменными) следует, что любая прямая АВ, проведенная в теле и перпендикулярная плоскости Оху, будет перемещаться поступательно, т. е. траектории, скорости, ускорения всех точек этой прямой будут одинаковы. Таким образом, для определения движения тела необходимо знать движение лишь одной точки на каждой прямой, проведенной перпендикулярно плоскости Оху. Взяв точки в одной плоскости, параллельной плоскости Оху, мы можем утверждать, что плоское движение твердого тела вполне определяется движением плоской фигуры, полученной от пересечения тела любой плоскостью, параллельной плоскости Оху.
Итак, задание движения тела сводится к заданию движения одного его сечения, поэтому будем изображать только плоскую фигуру – сечение тела – и изучать движение точек этого сечения в его плоскости (рис. 2.21). Рис. 2.21
Свяжем жестко с плоской фигурой систему координат А, х, у. Тогда положение системы А, х у, а вместе с ней и плоской фигуры относительно О,х1,у1 будет определено заданием координат хА, уА точки А и углом  Таким образом,
5.2. Скорости точек тела при плоском движении. Теорема. Скорость любой точки плоской фигуры равна геометрической сумме скорости точки, принятой за полюс, и скорости данной точки при вращении плоской фигуры вокруг полюса. Доказательство. Рассмотрим плоскую фигуру (рис. 2.22). Точку А примем за полюс. Вычислим скорость точки В. Радиус-вектор
Рис. 2.22
Продифференцируем по времени обе части записанного уравнения: Заметим, что
Введем обозначение Движение тела относительно Ах2у2 представляет собой вращение тела вокруг оси Аz2 перпендикулярно плоскости чертежа. Таким образом,
и равенство (*) примет вид Модуль скорости
При этом вектор Теорема. Проекции скоростей двух точек на прямую, их соединяющую, равны. Доказательство. Пусть скорость точки А (рис. 2.23) известна –
Спроектируем обе части этого равенства на ось х:
Рис. 2.23
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2018-05-30; просмотров: 456. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

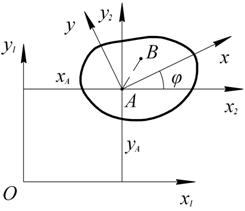
 между осями Ах2 и Ах (оси Ах2 и Ау2 соответственно параллельны осям Ох1 и Оу1 и перемещаются при движении плоской фигуры поступательно).
между осями Ах2 и Ах (оси Ах2 и Ау2 соответственно параллельны осям Ох1 и Оу1 и перемещаются при движении плоской фигуры поступательно). определяют положение плоской фигуры в любой момент времени, т. е. уравнения движения плоской фигуры.
определяют положение плоской фигуры в любой момент времени, т. е. уравнения движения плоской фигуры. определяет положение точки В относительно 0х1у1; радиус-вектор
определяет положение точки В относительно 0х1у1; радиус-вектор  – положение точки А относительно 0х1у1; радиус-
– положение точки А относительно 0х1у1; радиус- – положение точки В относительно 0х2у2. Очевидно,
– положение точки В относительно 0х2у2. Очевидно,  .
.
 (*)
(*) скорость точки В относительно подвижной системы координат Ах2у2.
скорость точки В относительно подвижной системы координат Ах2у2. .
. – это скорость точки В при вращении тела вокруг оси, проходящей через полюс А, т. е. с учетом формулы Эйлера:
– это скорость точки В при вращении тела вокруг оси, проходящей через полюс А, т. е. с учетом формулы Эйлера: ,
, . (2.27)
. (2.27) определяется следующим образом:
определяется следующим образом:
 ).
). . Согласно предыдущей теореме для скорости точки В имеем:
. Согласно предыдущей теореме для скорости точки В имеем: .
. ,
,  , так как
, так как  , то
, то  .
.