|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
ПОТЕРИ МОЩНОСТИ В УСТАНОВИВШИХСЯ РЕЖИМАХ РАБОТЫ НЕРЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДОВ И РЕГУЛИРУЕМЫХ .НЕРЕГУЛИРУЕМЫЕ ЭП Потери мощности в нерегулируемом электроприводе складываются из потерь мощности в электродвигателе Для двигателей постоянного тока:
где Для асинхронных трехфазных двигателей:
При небольшом диапазоне изменения токов АД, когда намагничивающий ток
где Для трех фазных синхронных двигателей:
где
 Для наглядного представления потерь мощности приведем энергетические диаграммы ДПТ НВ (рис.6.1) и АД (рис.6.2).
Механические характеристики ДПТ НВ и АД в пределах рабочей зоны в установившемся режиме можно считать линейными Как можно видеть из энергетических диаграмм ДПТ НВ и АД и рис.6.3, переменные потери в якоре ДПТ НВ и в роторе
где
Переменные потери мощности в электродвигателях с линейной механической характеристикой пропорциональны скольжению. Колебания скорости и момента приводят к увеличению потерь мощности. РЕГУЛИРУЕМЫЕ ЭП Для регулируемых электроприводов постоянного тока постоянные потери мощности представляют в таком виде:
где DРв.ном – номинальные потери мощности на возбуждение, m – показатель, характеризующий кривую намагничивания, 1<m<2. Переменные потери в регулируемых электроприводах постоянного тока выражаются прежней формулой где
Потери в стали ротора зависят от частоты (скольжения s) тока ротора:
Как будут изменяться составляющие постоянных потерь регулируемого АД, будет зависеть от способа регулирования. При реостатном способе регулирования АД имеем:
При частичном управлении АД по одному из законов стабилизации потокосцеплений (статора, взаимоиндукции или ротора) магнитный поток Ф»Фном, а абсолютное скольжение sа обычно поддерживается на низком уровне (в пределах номинального на естественной характеристике), что позволяет пренебречь потерями в стали ротора и считать скорость пропорциональной частоте. В результате, при частотном управлении АД по закону Ф=const постоянные потери можно записать в таком виде
Переменные потери мощности при частотном управлении АД определяются выражениями (6.21) – (6.22):
sа – абсолютное скольжение, w0ном – синхронная угловая скорость АД при номинальной частоте,b – модуль жесткости механической характеристики, который для линейной (линеаризованной) характеристики равен
При реостатном регулировании АД дело обстоит по-другому. Переменные потери в статоре АД при реостатном регулировании 1.10. ПОТЕРИ ЭНЕРГИИ В ПЕРЕХОДНЫХ ПРОЦЕССАХ ЭЛЕКТРОПРИВОДОВ ПРИ ПОСТОЯННОЙ ВЕЛИЧИНЕ СКОРОСТИ ИДЕАЛЬНОГО ХОЛОСТОГО ХОДА (Ω0=CONST). Потери энергии в переходных процессах электропривода зависят от системы электропривода и способа формирования переходного процесса и в общем случае определяются выражением где ΔP(t) – суммарные потери мощности в данный момент времени переходного процесса, tП.П. – время переходного процесса. Главнейшим фактором, определяющим потери энергии в переходном процессе, является характер изменения скорости ω0 идеального холостого хода. В электроприводах с ω0=const управляющее воздействие изменяется скачком. Потери энергии, вызванные механическим переходным процессом, значительно превосходят потери энергии от электромагнитного переходного процесса. Поэтому при оценке потерь энергии в переходных процессах будет учитывать только механические переходные процессы. Постоянные потери в переходных процессах электропривода составляют менее 5% от суммарных потерь. Поэтому в переходных процессах электропривода будем учитывать потери энергии только от переменных потерь мощности. Потери мощности в якорной цепи ДПТ НВ и в роторной цепи АД: ΔР= РЭМ – РМХ=М(ω0–ω) (6.121) Соответственно потери энергии будут равны разности электромагнитной А1 и полной механической А2 энергий электропривода: ΔА= А1 – А2 (6.122) где
Произведение Jω есть момент количества движения и имеет размерность H·м·с·рад. Потери энергии в электроприводе при изменении угловой скорости ротора от ω1 до ω2 можно записать в виде L1(ω), L2(ω) – моменты количества движения электропривода при угловой скорости ω0 идеального холостого хода и текущей угловой скорости ω.Соотношение (6.131) можно представить графически (рис. 6.11). Как следует из рис. 6.11, потери энергии в электроприводе при изменении скорости от ω1 до ω2 равны площади трапеции BCFE, так как А1=пл.ABCD, А2=пл.AEFD. Возьмем интегралы: Пуск вхолостую: ω1=0; ω2=ω0; ωсρ= ½(ω2 + ω1)= ½ ω0; Δω = ω2 – ω1= ω0.
Динамическое торможение вхолостую: ω1=ω0; ω2=0; ωсρ= 0,5(ω2 + ω1)= 0,5ω0; Δω = ω2 – ω1= –ω0.
Торможение противовключением вхолостую: ω1=ω0; ω2=0; ω0<0; ωсρ= 0,5(ω2 + ω1)= 0,5ω0; Δω = ω2 – ω1=0–ω0= –ω0. Вычисляем: А1=Jω0Δω=J(-ω0)(-ω0)=J ΔАпр.о=А1 – А2=J Отсюда видно, что потери энергии при торможении электропривода противовключением вхолостую в три раза больше потерь энергии при пуске или динамическом торможении вхолостую (рис. 6.14).
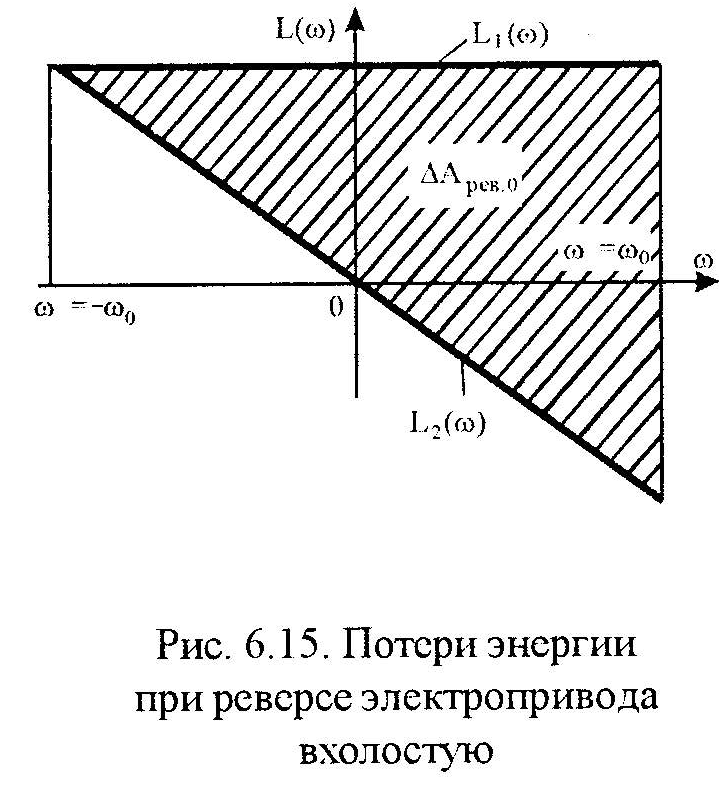
ω1=ω0; ω2= –ω0; ω0<0; ωсρ= 0,5(ω2 + ω1)= 0; Δω = ω2 – ω1= –2ω0. Определяем: А1=Jω0Δω=J(-ω0)(-2ω0)=2J А2=JωсρΔω= J·0·(-2ω0)=0; ΔАрев.о=А1– А2=2J = Потери энергии при реверсе электропривода вхолостую равны сумме потерь энергии при торможении противовключением и пуске вхолостую (рис.6.15).
Полученные соотношения соответствуют потерям энергии в якоре ДПТ НВ и в роторе АД. Потери энергии ΔА1 в статоре АД определяются через потери ΔА2 в роторе таким образом Теперь можно записать суммарные потери энергии в асинхронном двигателе в переходном процессе электропривода вхолостую:
В переходных процессах электропривода с ω0=const электромагнитный момент не остается постоянным. Поэтому для оценки потерь энергии в переходных процессах электропривода с постоянным статическим моментом (МС=const) примем допущение, что в переходном процессе электромагнитный момент электродвигателя равен его среднему значению МСР. Тогда динамический момент
|
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 789. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 и в механической передаче
и в механической передаче  :
:  (6.1). Потери мощности в электродвигателе разделяют на постоянные
(6.1). Потери мощности в электродвигателе разделяют на постоянные  и переменные
и переменные  :
:  (6.2) Под постоянными понимаются потери мощности, независящие от нагрузки. К ним относятся: 1) потери в стали, 2) механические потери, 3) вентиляционные потери, 4) потери на возбуждение электродвигателей. Под переменными потерями
(6.2) Под постоянными понимаются потери мощности, независящие от нагрузки. К ним относятся: 1) потери в стали, 2) механические потери, 3) вентиляционные потери, 4) потери на возбуждение электродвигателей. Под переменными потерями  понимают потери мощности, зависящие от нагрузки, т. е. потери в проводниках обмоток, по которым протекает ток нагрузки.
понимают потери мощности, зависящие от нагрузки, т. е. потери в проводниках обмоток, по которым протекает ток нагрузки. ,(6.4)
,(6.4)  , (6.5) – номинальные переменные потери мощности,
, (6.5) – номинальные переменные потери мощности,  – суммарное сопротивление якорной цепи.
– суммарное сопротивление якорной цепи. , (6.6)где
, (6.6)где  ,
,  – соответственно потери мощности в обмотках статора и ротора;
– соответственно потери мощности в обмотках статора и ротора;  ,
,  – активные сопротивления фаз статора и ротора (приведенные).
– активные сопротивления фаз статора и ротора (приведенные). примерно постоянный, можно принять:
примерно постоянный, можно принять:  (6.7) Тогда переменные потери в трехфазной обмотке статора:
(6.7) Тогда переменные потери в трехфазной обмотке статора:  . Составляющую потерь
. Составляющую потерь  можно отнести к постоянным потерям (потери на возбуждение), а переменные потери АД выразить только через ток ротора
можно отнести к постоянным потерям (потери на возбуждение), а переменные потери АД выразить только через ток ротора ,(6.9)
,(6.9) (6.10).
(6.10). ,(6.11)
,(6.11) .Если ввести коэффициент загрузки
.Если ввести коэффициент загрузки (6.13), то переменные потери для любого электродвигателя можно записать в общем виде
(6.13), то переменные потери для любого электродвигателя можно записать в общем виде  (6.14)Суммарные потери мощности в электродвигателе
(6.14)Суммарные потери мощности в электродвигателе (6.15) Обозначим
(6.15) Обозначим  (6.16) как коэффициент потерь, который зависит от номинальной мощности, номинальной скорости и конструкции электродвигателя и в общем случае находится в пределах 0,5¸2, тогда с учетом (6.16) суммарные потери мощности в электродвигателе запишем в виде
(6.16) как коэффициент потерь, который зависит от номинальной мощности, номинальной скорости и конструкции электродвигателя и в общем случае находится в пределах 0,5¸2, тогда с учетом (6.16) суммарные потери мощности в электродвигателе запишем в виде  (6.17)
(6.17)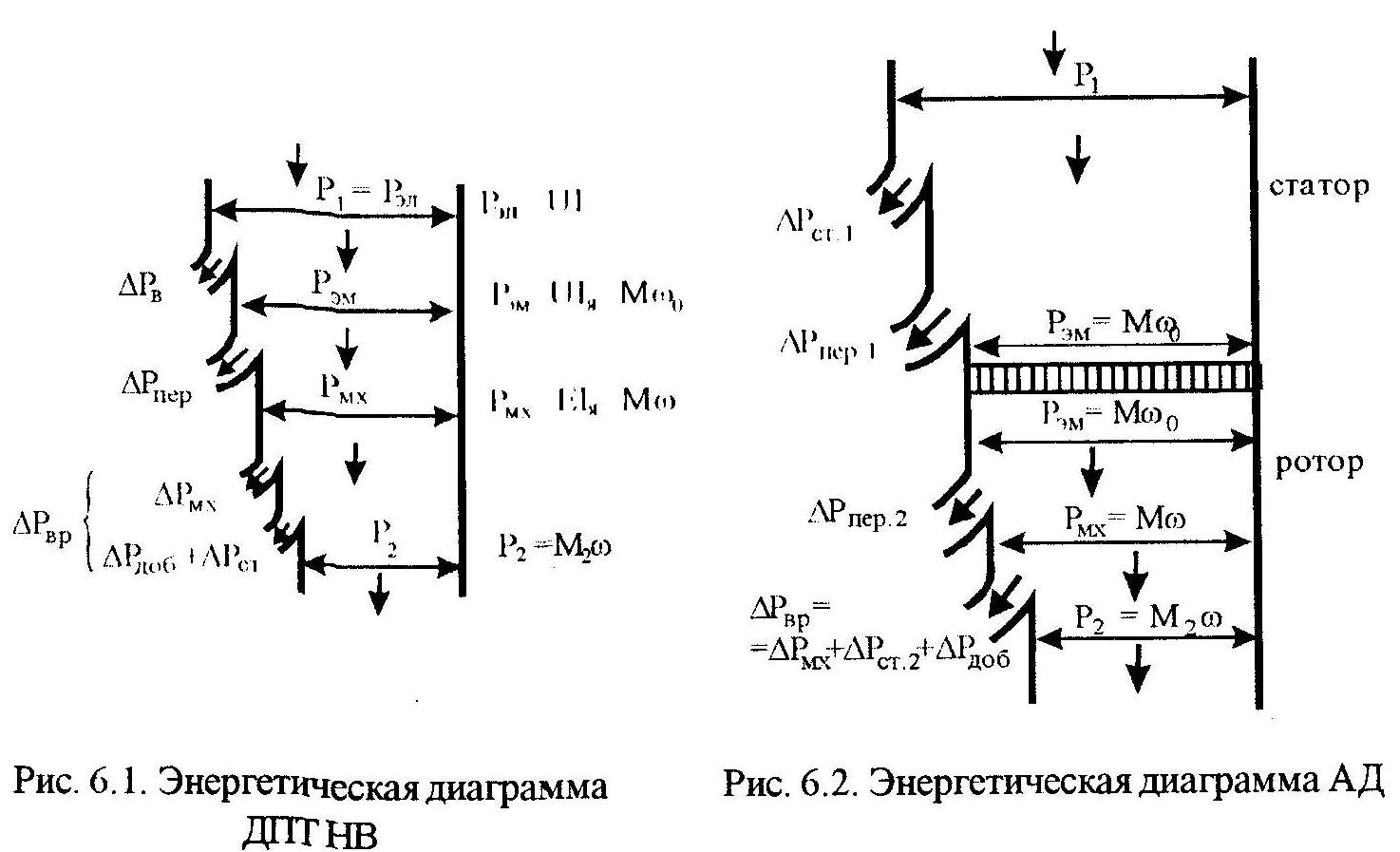
 (6.18)
(6.18) (6.19)
(6.19)  (6.20) Суммарные переменные потери для АД
(6.20) Суммарные переменные потери для АД , (6.21) где
, (6.21) где  (6.22)
(6.22) (6.29)
(6.29) , в регулируемых электроприводах постоянного тока к потерям в электродвигателе DРд добавляются потери мощности в преобразователе DРпр, которые тоже разделяют на постоянные (потери в стали силовых трансформаторов и реакторов) DРпост.пр и переменные (потери в обмотках трансформаторов, дросселей и вентилях) DРпер.пр:
, в регулируемых электроприводах постоянного тока к потерям в электродвигателе DРд добавляются потери мощности в преобразователе DРпр, которые тоже разделяют на постоянные (потери в стали силовых трансформаторов и реакторов) DРпост.пр и переменные (потери в обмотках трансформаторов, дросселей и вентилях) DРпер.пр:  (6.30)
(6.30) – номинальные потери в вентилях преобразователя,
– номинальные потери в вентилях преобразователя,  – потери короткого замыкания в трансформаторе,
– потери короткого замыкания в трансформаторе,  – потери в дросселях,
– потери в дросселях,  – коэффициент загрузки. Постоянные потери мощности в регулируемом асинхронном двигателе включают потери в стали статора DРст.1, потери в стали ротора DРст.2, потери в обмотке статора от протекания намагничивающего тока DРm и механические потери DРмх:
– коэффициент загрузки. Постоянные потери мощности в регулируемом асинхронном двигателе включают потери в стали статора DРст.1, потери в стали ротора DРст.2, потери в обмотке статора от протекания намагничивающего тока DРm и механические потери DРмх: (6.31).В свою очередь механические потери принимают пропорциональными квадрату скорости
(6.31).В свою очередь механические потери принимают пропорциональными квадрату скорости  (6.32) из-за преобладающего влияния вентиляционных потерь. Потери в стали статора АД можно записать в виде
(6.32) из-за преобладающего влияния вентиляционных потерь. Потери в стали статора АД можно записать в виде  , (6.33) где Ф, Фном – текущее и номинальное значение магнитного потока,f1, f1ном – текущее и номинальное значение частоты тока статора,m – показатель степени, принимающий значение m=1,3¸1,5 в зависимости от сорта электротехнической стали.
, (6.33) где Ф, Фном – текущее и номинальное значение магнитного потока,f1, f1ном – текущее и номинальное значение частоты тока статора,m – показатель степени, принимающий значение m=1,3¸1,5 в зависимости от сорта электротехнической стали. (6.34) Потери от протекания намагничивающего тока Im по обмотке статора можно выразить таким образом:
(6.34) Потери от протекания намагничивающего тока Im по обмотке статора можно выразить таким образом:  ,(6.35)где
,(6.35)где  ,(6.36)
,(6.36) ,поэтому постоянные потери
,поэтому постоянные потери (6.37) остаются примерно постоянными, т.к. возрастание потерь в стали при увел-ии скольжения ротора примерно компенсируется уменьшением мех-х потерь из-за уменьшения скорости.
(6.37) остаются примерно постоянными, т.к. возрастание потерь в стали при увел-ии скольжения ротора примерно компенсируется уменьшением мех-х потерь из-за уменьшения скорости. (6.38)
(6.38) , где
, где  (6.40)
(6.40) .В теории частотного управления обычно применяют обозначения
.В теории частотного управления обычно применяют обозначения  (6.41)
(6.41) (6.42) тогда
(6.42) тогда  (6.42)
(6.42) , (6.43), где
, (6.43), где  –приведенное суммарное активное сопр-е фазы ротора.
–приведенное суммарное активное сопр-е фазы ротора.  , (6.44),где sе – скольжение на естественной мех-й характеристике АД при данном электромагнитном моменте М,
, (6.44),где sе – скольжение на естественной мех-й характеристике АД при данном электромагнитном моменте М,  – приведенное собственное активное сопр-ие фазы ротора.Подставив в (6.44) в (6.43), получим
– приведенное собственное активное сопр-ие фазы ротора.Подставив в (6.44) в (6.43), получим  , (6.45),т.е. переменные потери в обмотке статора АД при реостатном регулировании и неизменном моменте на валу являются постоянными, независящими от скорости. Переменные же потери в роторе АД при постоянном моменте
, (6.45),т.е. переменные потери в обмотке статора АД при реостатном регулировании и неизменном моменте на валу являются постоянными, независящими от скорости. Переменные же потери в роторе АД при постоянном моменте  , (6.46)будут пропорциональные скольжению, т.е. будут увеличиваться со снижением скорости.
, (6.46)будут пропорциональные скольжению, т.е. будут увеличиваться со снижением скорости. (6.120)
(6.120) (6.123)
(6.123)  (6.124)
(6.124) Рассмотрим частный случай при МС=0: М=МДИН=J
Рассмотрим частный случай при МС=0: М=МДИН=J  , (6.125),что при подстановке в (6.123) и (6.124) приводим к результату
, (6.125),что при подстановке в (6.123) и (6.124) приводим к результату  (6.126)
(6.126)  (6.127), где ω1 и ω2 – угловые скорости электродвигателя в начале и в конце переходного процесса, J – суммарный момент электропривода, приведенный к валу электродвигателя.
(6.127), где ω1 и ω2 – угловые скорости электродвигателя в начале и в конце переходного процесса, J – суммарный момент электропривода, приведенный к валу электродвигателя. (6.131) где L1(ω)=Jω0, (6.132) L2(ω)=Jω, (6.133)
(6.131) где L1(ω)=Jω0, (6.132) L2(ω)=Jω, (6.133)  (6.134)
(6.134)  (6.135) где Δω = ω2 – ω1 (6.136), ωсρ= ½(ω2 + ω1) (6.137) В результате можем записать общую формулу для определения потерь энергии в якорной (роторной) цепи электропривода за время переходного процесса при ω0=const и МС=0: ΔА0 = JΔω(ω0 – ωсρ) (6.138). Рассмотрим частные случаи потерь энергии в переходных процессах электропривода при ω0=const и МС=0.
(6.135) где Δω = ω2 – ω1 (6.136), ωсρ= ½(ω2 + ω1) (6.137) В результате можем записать общую формулу для определения потерь энергии в якорной (роторной) цепи электропривода за время переходного процесса при ω0=const и МС=0: ΔА0 = JΔω(ω0 – ωсρ) (6.138). Рассмотрим частные случаи потерь энергии в переходных процессах электропривода при ω0=const и МС=0. Находим А1=Jω0Δω=J
Находим А1=Jω0Δω=J  ; А2=JωсρΔω= ½ J
; А2=JωсρΔω= ½ J  =
=  .
. Как видно, потери энергии при пуске электропривода вхолостую равны половине электромагнитной энергии, потребляемой электроприводом, или равны запасу кинетической энергии электропривода независимо от времени пуска или каких-либо схемных решений (рис. 6.12)
Как видно, потери энергии при пуске электропривода вхолостую равны половине электромагнитной энергии, потребляемой электроприводом, или равны запасу кинетической энергии электропривода независимо от времени пуска или каких-либо схемных решений (рис. 6.12) Так как при динамическом торможении якорь электродвигателя отключен от силовой цепи, то L1(ω)=0; А1=0.Полная механическая мощность: А2=JωсρΔω= –½ J
Так как при динамическом торможении якорь электродвигателя отключен от силовой цепи, то L1(ω)=0; А1=0.Полная механическая мощность: А2=JωсρΔω= –½ J  .Следовательно, при динамическом торможении вхолостую потери энергии равны запасу кинетической энергии электропривода, так как при динамическом торможении теряется вся накопленная механическая энергия (рис.6.13).поэтому при динамическом торможении вхолостую потери энергии равны потерям энергии при пуске вхолостую.
.Следовательно, при динамическом торможении вхолостую потери энергии равны запасу кинетической энергии электропривода, так как при динамическом торможении теряется вся накопленная механическая энергия (рис.6.13).поэтому при динамическом торможении вхолостую потери энергии равны потерям энергии при пуске вхолостую. ; А2=JωсρΔω= ½ J
; А2=JωсρΔω= ½ J  (-ω0)= –½J
(-ω0)= –½J  –(–½ J
–(–½ J  )=
)= 
 Реверс вхолостую:
Реверс вхолостую: ;
; =
=
 (6.139)
(6.139) (6.140)
(6.140) Где
Где  (6.141)
(6.141)  (6.142)
(6.142) (6.143) и скорость двигателя в переходном процессе изменяется по линейному закону
(6.143) и скорость двигателя в переходном процессе изменяется по линейному закону  (6.144)где
(6.144)где  (6.145) есть угловое ускорение электродвигателя. При принятых допущениях имеем М(t)=Мср= Мс+ Мдин (6.146)
(6.145) есть угловое ускорение электродвигателя. При принятых допущениях имеем М(t)=Мср= Мс+ Мдин (6.146)  (6.147) что позволяет подинтегральныевыражения в (6.123) и (6.124) записать в виде
(6.147) что позволяет подинтегральныевыражения в (6.123) и (6.124) записать в виде  (6.148)
(6.148)  (6.149)Обозначим
(6.149)Обозначим  (6.150),тогда действие статического момента (в рамках принятых допущений) в переходном процессе электропривода можно интерпретировать как изменение суммарного момента инерции электропривода
(6.150),тогда действие статического момента (в рамках принятых допущений) в переходном процессе электропривода можно интерпретировать как изменение суммарного момента инерции электропривода  (6.151) и моменты количества движения(6.148) и(6.149) записать таким образом:
(6.151) и моменты количества движения(6.148) и(6.149) записать таким образом:  , (6.152)
, (6.152)  , (6.153) Потери энергии в переходном процессе при допущении
, (6.153) Потери энергии в переходном процессе при допущении  будут равны:
будут равны:  , (6.154), Поскольку динамический момент может быть положительным и отрицательным, то потери энергии в переходном процессе электропривода будут зависеть от характера этого процесса. При разгоне электропривода
, (6.154), Поскольку динамический момент может быть положительным и отрицательным, то потери энергии в переходном процессе электропривода будут зависеть от характера этого процесса. При разгоне электропривода  и
и  , что равносильно разгону вхолостую электропривода с увеличенным моментом инерции. Естественно, что потери энергии при этом будут больше, чем при
, что равносильно разгону вхолостую электропривода с увеличенным моментом инерции. Естественно, что потери энергии при этом будут больше, чем при  (Рис.6.16). Потери энергии при пуске электропривода будут определяться площадью треугольника ODGдля
(Рис.6.16). Потери энергии при пуске электропривода будут определяться площадью треугольника ODGдля  и площадью ОАВ для
и площадью ОАВ для  . Можно видеть, что пл. ODG>пл. ОАВ. При торможении электропривода
. Можно видеть, что пл. ODG>пл. ОАВ. При торможении электропривода  и
и  , что эквивалентно торможению электропривода вхолостую с уменьшенным моментом инерции. Поэтому потери энергии при торможении с
, что эквивалентно торможению электропривода вхолостую с уменьшенным моментом инерции. Поэтому потери энергии при торможении с  будут меньше, чем при торможении вхолостую (Рис.6.17).
будут меньше, чем при торможении вхолостую (Рис.6.17). Потери энергии при динамическом торможении электропривода равны площади треугольника ОАВ при
Потери энергии при динамическом торможении электропривода равны площади треугольника ОАВ при  и площади треугольника ОВС при
и площади треугольника ОВС при  . Из Рис.6.17 видно, что пл. ОВС< пл. ОАВ.
. Из Рис.6.17 видно, что пл. ОВС< пл. ОАВ.