|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Понятие робастной устойчивости. Робастная стабилизацияРобастное управление совокупность методов теории управления, целью которых является синтез такого регулятора, который обеспечивал бы хорошее качество управления (к примеру, запасы устойчивости), если объект управления отличается от расчётного или его математическая модель неизвестна. Таким образом, робастность означает малое изменение выхода замкнутой системы управления при малом изменении параметров объекта управления. Системы, обладающие свойством робастности, называются робастными (грубыми) системами. Обычно робастные контроллеры применяются для управления объектами с неизвестной или неполной математической моделью, и содержащими неопределённости.
О1. Будем говорить, что замкнутая система Система робастно устойчива, если она устойчива при всех допустимых значениях неопределенных элементов системы. О 2. Будем говорить, что замкнутая система
Системы стабилизации, задачей которых является обеспечение некоторого заданного, обычно оптимального состояния объекта при изменяющихся внешних условиях и (или) внутренних параметрах. Оперируя понятием пространства состояний, можно сформулировать следующую общую стратегию стабилизации искусственных систем: при отклонениях изображающей точки х=[х1х2…хn]Т системы от положения равновесия, не выходящих за пределы некоторой опустимой области W, состояние стабильности обеспечивается соответствующей локальной подсистемой; при недостаточности ресурсов управления локальной подсистемы изображающая точка достигает границы области W и в процесс стабилизации включаются другие подсистемы, обладающие, в своей совокупности, всеми ресурсами многомерного управления. В результате взаимосвязанного действия этих подсистем происходят значительные внутренние перестройки структуры системы, которые удерживают переменные состояния в заданной области W. 
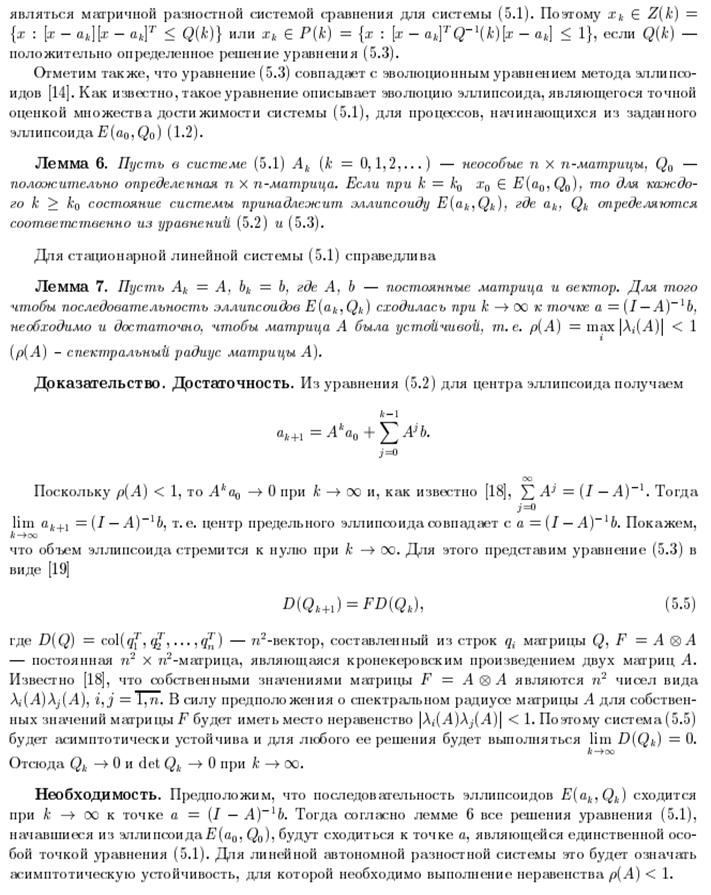
Матричные системы сравнения для оценки областей фазового состояния системы
Сходимость и существование эллипсоидальных оценок
|
||||||||
|
|
Последнее изменение этой страницы: 2018-05-30; просмотров: 619. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

 обладает свойством робастной устойчивости (является робастно устойчивой) по отношению к неопределенности
обладает свойством робастной устойчивости (является робастно устойчивой) по отношению к неопределенности  , если для любой
, если для любой  выполняется условие
выполняется условие  ,
,  . В этом случае будем говорить, что регулятор
. В этом случае будем говорить, что регулятор  обеспечивает робастную устойчивость замкнутой системы.
обеспечивает робастную устойчивость замкнутой системы. , где
, где  – допустимое множество значений рассматриваемого функционала. В этом случае будем говорить, что регулятор
– допустимое множество значений рассматриваемого функционала. В этом случае будем говорить, что регулятор