|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Главный момент количества движения системыГлавным моментом количества движения (или кинематическим моментом) системы относительно данного центра О называется величина К0, равная геометрической сумме моментов количества движения всех точек системы относительно этого центра: Аналогично определяются моменты количества движения системы относительно осей координат:
Подобно тому, как количество движения системы является характеристикой ее поступательного движения, главный момент количества движения системы является характеристикой вращательного движения системы. Определение вектора К0 сводится к определению его проекций кx, кy, кz. Найдем сначала кz, т. е. кинетический момент вращательного тела относительно оси вращения (рис. 4.10). Для любой точки, отстоящей от оси вращения на расстояние hк, скорость
Следовательно, для этой точки
Тогда для всего тела
где Окончательно находим:
Рис. 4.10
Если система состоит из нескольких тел, вращающихся вокруг одной и той же оси, то очевидно, что Вычислим теперь величины кx, кy. Для определения Получим:
Но где I x z – центральный момент. Таким образом,

Теорема об изменении главного момента количества движения системы (теорема моментов) Теорема моментов, доказанная для одной материальной точки, будет справедлива для каждой из точек системы. Следовательно, если рассмотреть точку системы с массой mк, имеющую скорость
где Составляя такие уравнения для всех точек системы и складывая их почленно, получим: Но последняя сумма по свойству внутренних сил равна нулю. Тогда, учитывая равенство (4.10), найдем окончательно: Полученное уравнение выражает теорему моментов для системы: производная по времени от главного момента количества движения системы относительно некоторого неподвижного центра, равна сумме моментов всех внешних сил системы относительно того же центра. Проектируем обе части равенства (4.17) на координатные оси, получим: Доказанной теоремой широко пользуются при изучении вращательного движения тела, а также в теории удара. Практическая ценность теоремы моментов для системы состоит в том, что при изучении вращательного движения она позволяет исключить из рассмотрения все неизвестные внутренние силы.
|
||
|
|
Последнее изменение этой страницы: 2018-05-30; просмотров: 411. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 . (4.13)
. (4.13) . (4.14)
. (4.14) .
. .
. ,
, – момент инерции тела относительно оси z.
– момент инерции тела относительно оси z. (4.15)
(4.15)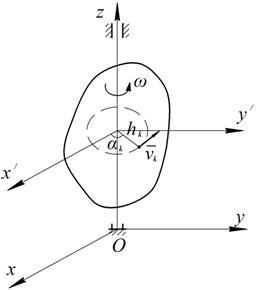
 . (4.16)
. (4.16) необходимо спроектировать вектор
необходимо спроектировать вектор  на плоскость Оyz, т. е. на ось у/.
на плоскость Оyz, т. е. на ось у/. .
. ; в результате
; в результате ,
, (4.17)
(4.17) , то для нее
, то для нее ,
, – равнодействующие всех внешних и внутренних сил, действующих на данную точку.
– равнодействующие всех внешних и внутренних сил, действующих на данную точку. .
. . (4.18)
. (4.18) . (4.19)
. (4.19)