|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Подсистема стабилизации параметров движения
Для выдерживания параметров траектории движения, таких как высота, скорость, число М, боковое отклонение, вводится специальная система стабилизации, использующая соответствующую первичную информацию. В горизонтальной плоскости используются сигналы бокового отклонения от заданной траектории
Рис. 7. Структурная схема управления на траектории (боковое движение)
В режиме автоматической стабилизации самолета по сигналам НВУ каналы курса и тангажа работают по законам управления, описываемым уравнениями (5) и (9). Канал элеронов работает в режиме, описанным уравнением (11), только в этом случае заданный угол крена имеет вид:
При стабилизации траектории по сигналам системы
Усложнение формирования заданного крена при использовании сигнала
где  При
Рис. 8. Структурная схема управления на траектории (продольное движение)
Заданный сигнал по высоте, входящий в общее уравнение управления рулем высоты, (7) имеет вид
Интеграл от отклонения В АБСУ-154 автоматическая стабилизация приборной скорости осуществляется либо регулированием тяги двигателей, либо изменением положения самолета в пространстве. В последнем случае в закон управления рулем высоты (8) аналогично формированию управляющего сигнала по высоте (15) вводится отклонение от заданной скорости и интеграл этого отклонения:
Управляющий сигнал стабилизации числа М формируется также
В связи с медленным изменением числа М, необходимость в использовании производной отпадает.
|
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 445. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 и скорости этого отклонения
и скорости этого отклонения  (рис. 7). Эта информация поступает от специального навигационного вычислительного устройства (НВУ). Кроме того, при полете по всенаправленным маякам типа
(рис. 7). Эта информация поступает от специального навигационного вычислительного устройства (НВУ). Кроме того, при полете по всенаправленным маякам типа  по сигналам этой системы, пропорциональным углу отклонения от заданной радиомаяком траектории, производится стабилизация движения «на» и «от» радиомаяка.
по сигналам этой системы, пропорциональным углу отклонения от заданной радиомаяком траектории, производится стабилизация движения «на» и «от» радиомаяка.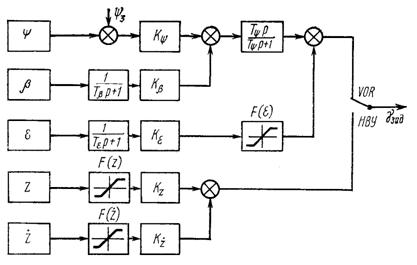
 , тогда
, тогда . (13)
. (13) . (14)
. (14) вызвано необходимостью фильтрации сигналов, имеющих высокий уровень помех. При высоком уровне помех производные отклонения содержат неправильную информацию, поэтому производная углового отклонения
вызвано необходимостью фильтрации сигналов, имеющих высокий уровень помех. При высоком уровне помех производные отклонения содержат неправильную информацию, поэтому производная углового отклонения  заменяется производной линейного отклонения, которая при отсутствии скольжения может быть выражена как
заменяется производной линейного отклонения, которая при отсутствии скольжения может быть выражена как ,
, – скорость;
– скорость;  – разность между заданным и текущим курсом;
– разность между заданным и текущим курсом;  – угол сноса.
– угол сноса. производная отклонения приводится к виду, представленному в уравнении (4). Фильтрация сигналов
производная отклонения приводится к виду, представленному в уравнении (4). Фильтрация сигналов  и
и  , стабилизация высоты полета – по сигналам отклонения от заданной высоты полета и его производной (рис. 8).
, стабилизация высоты полета – по сигналам отклонения от заданной высоты полета и его производной (рис. 8).
 и
и . (15)
. (15) вводится для обеспечения статизма по отклонению от заданной высоты полета в ограниченных функцией
вводится для обеспечения статизма по отклонению от заданной высоты полета в ограниченных функцией  пределах.
пределах. . (16)
. (16) . (17)
. (17)