|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
ПРОДОЛЬНЫЕ КОЛЕБАПИЯ СТЕРЖНЕЙ.Продольные колебания стержня постоянного сечения. При выводе уравнения движения основываемся на гипотезе плоских сечений. Кроме того, пренебрегаем силами инерции, связанными с поперечными движениями частиц стержня при его 6растяжении — сжатии. Тогда положение каждого поперечного сечения в процессе движения полностью характеризуется его продольным смещением x, а нормальная сила в сечении N оказывается связанной с продольной деформацией
где F —■ площадь сечения стержня. Составим уравнение движения элемента dz стержня (рис.)
где или после подстановки значения N Для однородного стержня
Как видно из вывода, уравнение продольных колебаний (1.2) является приближенным. Однако его погрешности становятся заметными только при исследовании весьма высокочастотных колебаний, когда длины волн, распространяющихся в стержне, имеют размеры порядка размеров поперечного сечения. Определение частот и форм собственных продольных колебаний стержней постоянного сечения. Как было показано в предыдущем параграфе, исследование продольных колебаний стержня постоянного поперечного сечения приводит к дифференциальному уравнению (7.2) в частных производных, так называемому волновому уравнению. Далее рассматриваются решения уравнения применительно к продольным колебаниям стержней. Полученные здесь результаты могут быть6 полностью приложены к расчету крутильных колебаний и колебаний струн. Решение волнового уравнения, соответствующее собственным колебаниям стержня, может быть представлено в виде 
где р — угловая частота колебаний; Подставив это выражение в уравнение (1.2), получим обыкновенное дифференциальное уравнение для амплитудной функции
Общее решение уравнения (1.5) имеет вид
Амплитудная функция должна удовлетворять граничным условиям на концах стержня. Эти условия таковы: при заделанных торцах х = 0 и, следовательно, u = 0; при свободных торцах N' = 0 и, следовательно, du/dz = 0. Если левый торец стержня (z = 0) упруго закреплен, причем жесткость закрепления с, то N = сх, следовательно, EF(du/dz)=cu. Если упруго закреплен правый торец, то граничное условие имеет вид EF(du/dz)=cu.
и заменяя в нем х выражением (1.4):
Аналогично, если груз закреплен на правом конце стержня (рис. 17.5, 6), имеем
При любом способе закрепления концов стержня, подставив в граничные условия общее выражение (1.6) функции u(z), придем к системе двух линейных алгебраических уравнений относительно
НЕЛИНЕЙНЫЕ СИСТЕМЫ.
Теория нелинейных колебаний или, как иногда ее называют, нелинейная механика, занимается изучением периодических колебательных движений, описываемых нелинейными дифференциальными уравнениями. Системы, совершающие такие движения, называются обычно нелинейными системами. Таким образом, нелинейная механика занимается изучением периодических движений нелинейных систем. По сравнению с линейной теорией, нелинейная механика является дальнейшим углублением наших познаний о законах механического движении. Освобождаясь от многих искусственных построений линейной теории, нелинейная механика дает, как правило, более точное и полное отображение свойств колебательных движений механических систем. Дело в том, что линейность редко бывает свойством, присущим самой системе, вытекающим из ее устройства или ее физической природы. В большинстве случаев линейность есть результат упрощения реальной системы, чаще всего осуществляемого путем пренебрежения в уравнениях движения членами второго и высших порядков относительно координат и скоростей. Так, например, составляются линейные уравнения малых колебаний упругих систем около положения устойчивого равновесия. Основываясь на допущении, что, получив достаточно малое начальное возмущение, в дальнейшем возмущенном движении система пребывает в ближайшей окрестности невозмущенного состояния, в выражениях кинетической и потенциальной энергии сохраняют только члены низшего порядка, отбрасывая все другие, подобно бесконечно малым высших порядков. В результате такой операции приходят к линейным дифференциальным уравнениям движения с постоянными коэффициентами. Изучение построенных таким искусственным способом линейных систем дает возможность сделать заключения о свойствах их колебаний, полезные во многих практических расчетах. Однако в большом числе случаев линеаризация системы, хотя и осуществляемая путем пренебрежения весьма малыми величинами, дает грубое, упрощенное представление действительных процессов с количественными результатами, иногда неприемлемыми даже в ориентировочных расчетах. Во всяком случае линеаризация ограничивает возможность полного и всестороннего раскрытия всех колебательных свойств системы. Часто она приводит к неправильным заключениям о поведении системы и является вообще недопустимой. Напомним некоторые общеизвестные факты такого рода. Как известно, сопротивление среды (в частности, вязкое трение) зависит от скорости и с уменьшением последней может сделаться сколь угодно малым. Характеристика такого сопротивления имеет вид кривой. Для небольших скоростей, где кривая почти не отличается от прямой, линеаризация сопротивления, т. е. замена участка кривой прямолинейным отрезком, является вполне допустимой, так как прямая здесь достаточно точно воспроизводит общий характер изменения сопротивления. Иначе дело обстоит с сухим (кулоновым) трением. Линеаризация уравнения с сухим трением невозможна, как бы мал ни был промежуток, на котором рассматриваются изменения скорости около начала координат. Многие весьма употребительные в машиностроении материалы не следуют закону Гука и для малых деформаций. Характеристики растяжения или сжатия таких, например, материалов, как кожа, резина, бетон и др. не имеют прямолинейных участков. Их модуль упругости изменяется вместе с величиной деформации. В зависимости от расположения кривой Р(х) относительно прямой (которая соответствует линейной характеристике), касательной к ней в начале координат О, мы будем иметь жесткую и мягкую системы. Такие свойства указанных материалов, очевидно, не могут быть учтены в линейной теории, а между тем, именно эти свойства имеют иногда существенное значение, например, в расчетах резонансных колебаний и динамической прочности. Частоты колебаний деталей некоторых устройств, включающих элементы из таких материалов, зависят от амплитуды колебаний; в одних случаях они растут с увеличением амплитуд (жесткие системы), в других, наоборот, убывают (мягкие системы). Включение в колеблющиеся системы таких нелинейных элементов может иногда в значительной степени ослабить последствия резонанса. Увеличение амплитуды вызовет изменение частоты, а это повлечет за собой автоматический выход системы из условий резонанса. Замечательным примером системы, линеаризация которой ограничивает возможности обнаружения ее важнейших колебательных свойств, могут служить обыкновенные часы с маятником, приводимые в движение, например, падающим грузом. Линейная трактовка колебаний маятника предполагает, что отклонения маятника от вертикального положения равновесия весьма малы. Такие малые колебания маятник будет совершать, если ему сообщить достаточно малое начальное возмущение (отклонение). Но, как легко проверить, при малом начальном возмущении маятник, предоставленный затем самому себе, будет совершать затухающие колебания с быстро убывающими амплитудами, пока не остановится в вертикальном положении. Часы от такого малого начального возмущения «не пойдут*, так как источник пополнения расходуемой маятником энергии (падающий груз) при таких колебаниях не включается. Таким образом, линеаризация системы — часы с маятником — не дает возможности обнаружить в ней те свойства, которые являются наиболее характерными для часов как инструмента для измерения времени. Эти свойства проявляются только при достаточно большом начальном возмущении и при колебаниях с конечной амплитудой. Когда маятник получит возмущение, большее некоторого предела, в дальнейшем своем движении он ведет себя резко отлично от привычного в линейной теории поведения систем с сопротивлением. Амплитуды колебаний маятника начинают расти или убывать, приближаясь в том и другом случае к одному предельному стационарному значению, достигнув которого они дальше не изменяются, так что маятник совершает устойчивые изохронные колебания, обеспечивая тем самым более или менее точный отсчет времени. Открыть существование такого устойчивого периодического движения в системе с сопротивлением, оставаясь в пределах линейной теории, описать средствами последней свойства этого движения мы, конечно, не можем. Линейная трактовка задачи о колебаниях маятника часов связана с отказом от исследования наиболее важных с практической точки зрения колебательных свойств системы, наиболее характерных для ее назначения и использования.
Можно было бы привести и другие примеры, в которых линейная трактовка задачи о колебаниях не только не дает возможность открыть многие важные колебательные свойства системы, но заметно искажает даже обнаруживаемые ею свойства. Класс нелинейных систем бесконечно шире и многообразнее узкой области искусственно построенных линейных систем, и была бы безнадежной попытка перечисления всех неучитываемых линейной теорией их особенностей. Но некоторые общие свойства нелинейных систем, связанные с определением задач дальнейшего их исследования, можно отметить сейчас же в предварительной характеристике их отличий от линейных. К таким свойствам относятся следующие. К нелинейным системам неприменим принцип линейного наложения. Линейная суперпозиция двух или нескольких колебательных движений нелинейной системы не будет колебанием последней. Иначе говоря, из найденных независимых частных решений дифференциальных уравнений нелинейной системы нельзя составить общего решения, подобно тому, как составляется общее решение системы линейных уравнений. Если действующая на систему сила разложена в ряд Фурье, то действие ее на нелинейную систему не будет равно линейной сумме действий каждого отдельного гармонического слагаемого этого ряда. Свободные колебания линейных систем — всегда затухающие. Это одно из основных свойств линейных колебаний: в реальных условиях действие на линейную систему сопротивлений выражается в убывании отклонений системы от равновесного положения, которое, таким образом, оказывается единственным стационарным состоянием такой системы. Строго периодические колебания в линейных системах возможны только в форме вынужденных колебаний, возникающих от действия внешних возмущающих периодических сил. В нелинейных системах и при наличии сопротивления возможны строго периодические устойчивые свободные колебания. Потери энергии в некоторых нелинейных системах могут иногда автоматически компенсироваться поступлениями ее из неколебательного источника, дозировка которых во времени и по величине регулируется самой колеблющейся системой. Это имеет место в рассмотренном примере с колебаниями маятника часов и в других автоколебательных системах. В линейных системах вынужденные колебания от гармонической возмущающей силы происходят с частотой или периодом последней. В нелинейных системах вынужденные колебания от гармонической возмущающей силы могут происходить не только с периодом возмущающей силы, но и с периодами, равными целым кратным последнего. В связи с этим в данной нелинейной системе с одной степенью свободы, на которую действует только одна гармоническая возмущающая сила, возможны несколько резонансных режимов. В линейных системах собственные частоты не зависят от начальных условий, и, в частности, от амплитуды. Изменить частоту линейных колебаний можно только путем существенных изменений конструкции системы, распределения в ней масс и жесткостей. В нелинейных системах частота большей частью зависит от амплитуды колебаний. Эта зависимость имеет место главным
Динамические режимы в РДТТ
Динамические режимы в ракетных двигателях твердого топлива изучены сравнительно мало. Это объясняется прежде всего сложностью процесса горения твердого топлива, его многогранной взаимосвязью с явлениями, происходящими в объеме камеры РДТТ. Достоинства РДТТ, заключающиеся в простоте его конструкции и эксплуатации вследствие отсутствия перемещающихся и вращающихся элементов, обусловливают, однако, трудности в обеспечении нормального функционирования систем регулирования их режимов работы. Развитие ракетных двигателей твердого топлива, их совершенствование с целью удовлетворения повышающихся к ним требований (в том числе обеспечения жестких динамических характеристик) привело к необходимости усложнения конструкции РДТТ. Например, в настоящее время в составе некоторых типов РДТТ предусматриваются системы с жидкими рабочими телами и движущимися механизмами. Стремление иметь максимальные значения газотермодинамических параметров в условиях отсутствия охлаждающих систем приводит к функционированию элементов РДТТ а условиях, близких к экстремальным, в предельных температурных режимах, что затрудняет проверку создаваемых математических моделей нестационарных процессов. Динамика ракетных двигателей твердого топлива – это наука, занимающаяся изучением переменных режимов (процессов) их работы. Частью переменных режимов являются переходные, характеризующиеся тем, что при них изменение давления по времени не удовлетворяет условию квазистацнонарности (при котором процесс, идеализируя, можно представлять состоящим из непрерывно следующих друг за другом состояний равновесия). К переходным режимам РДТТ относятся: выход на основной режим работы; останов двигателя, представляющий режим работы РДТТ от момента окончания установившегося режима до момента достижения заданного давления на участке спада (рис. 0.1); переходы с одного режима на другой. Под режимом понимают состояние работающего двигателя, определяемое совокупностью параметров происходящих в нем процессов Главными задачами динамики РДТТ являются определение значений основных величин – тяги Р и давления в камере сгорания pk от момента запуска до его останова в зависимости от управляющих воздействий и различных возмущений. Одним из результатов решения задач динамики ракетных двигателей твердого топлива является получение их временных характеристик 1. Выход РДТТ на установившийся режим, определяемый временем от момента подачи команды на инициирующее устройство системы запуска до момента достижения заданного давления в камере сгорания основной режим работы РДТТ, который является определяющим при выполнении поставленной задачи; 2. Режим спада давления в камере сгорания, характеризуемый временем от момента окончания установившегося режима работы до момента достижения заданного давления на участке спада. Кроме перечисленных режимов работы РДТТ, присущих практически каждому его типу, существуют и другие. Например, в двух-режимном РДТТ имеет место переходный процесс с одного режима на другой. Известен также режим аварийного выключения РДТТ, вызываемый непредвиденными обстоятельствами и связанный с необходимостью преждевременного останова РДТТ из-за нарушения его работы. Для осуществления переходных процессов и возможности изменения тяги по величине и направлению по заданной программе в составе РДТТ могут предусматриваться различные системы управления, обеспечивающие автоматическое изменение рабочих величин с целью установления желаемого режима работы Наряду с «большими» скачками величин, характеризующих рабочий процесс двигателя (Р, pк), могут появляться и их незначительные отклонения, которые вызываются различным» случайным, (и закономерными) причинами. Для поддержания тяги (давления в камере сгорания) па требуемом уровне или для ее изменения по некоторому закону, определяемому задаваемой программой (для обеспечения точности движения ракеты по траектории полета) служат системы автоматического регулирования РДТТ. Проектирование систем регулирования РДТТ осуществляется на основе тактико-технических требований (ТТТ). В зависимости от этих требований и свойств объекта регулирования выбирается принципиальная схема системы регулирования и основные параметры регулирования. Большое значение имеет знание и изучение динамических характеристик двигателя и его основных элементов: передаточных функций, частотных характеристик, которые позволяют определить качество функционирования двигательной установки, ее реакцию на различные возмущения, способность работать устойчиво. Для получения передаточных функций и частотных характеристик необходимо знать динамические и статические свойства отдельных элементов двигателя (камеры, регуляторов и т. п.), а также характер связей между величинами, определяющими их работу. Составление математических моделей отдельных простейших звеньев РДТТ – одна из важнейших задач курса его динамики. Ракетный двигатель твердого топлива должен быть устойчив к различным внешним возмущениям, так как в противном случае возможно появление колебаний его основных параметров, как правило, приводящих к авариям. Поэтому исследование устойчивости его режимов работы также является важным разделом динамики.
|
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 546. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 законом Гуна для одноосного напряженного состояния
законом Гуна для одноосного напряженного состояния , (1.1)
, (1.1) ,
, - масса единицы длины стержня,
- масса единицы длины стержня,
 . (1.2)
. (1.2) , где
, где  - плотность материала,
- плотность материала, . (1.3)
. (1.3) (1.4)
(1.4) — амплитудная функция, определяющая форму колебания.
— амплитудная функция, определяющая форму колебания. ,
,  (1.5)
(1.5) . (1.6)
. (1.6)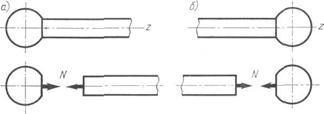 Рассмотрим случай, когда конец стержня связан с жестким грузом массой m (рис. 1, a). Граничное условие для функции u(z) можно получить, составляя уравнение движения груза m:
Рассмотрим случай, когда конец стержня связан с жестким грузом массой m (рис. 1, a). Граничное условие для функции u(z) можно получить, составляя уравнение движения груза m:
 .
.
 и
и  . Равенство нулю определителя системы позволяет найти собственные частоты стержня.
. Равенство нулю определителя системы позволяет найти собственные частоты стержня. и
и  для всего времени устойчивой работы двигателя. Можно выделить следующие режимы:
для всего времени устойчивой работы двигателя. Можно выделить следующие режимы: