|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Исследование модели плоского движения промышленного робота
Цель работы: изучение структуры незамкнутой кинематической цепи механизма по его модели и траектории конечного звена. Объект исследования: модель землеройной машины. В незамкнутой кинематической цепи имеются звенья, входящие в состав только одной кинематической пары. Такие кинематические цепи могут быть плоскими и пространственными и применяются в механизмах ПР, манипуляторов, автооператоров и землеройных машинах. В силу специфики рабочего процесса в землеройных машинах применяют плоские незамкнутые кинематические цепи. Если ковш землеройной машины заменить схватом, то получим кинематическую схему транспортного ПР, работающего в плоской системе координат.
Описание кинематической схемы лабораторной установки Рабочее оборудование землеройной машины включает стрелу 2 (рис. 1) с упорами 7 и 8 на ее головной части и промежуточной опорой; присоединенные шарнирно к головной части стрелы 2 рукоять 4 с ковшом 5 и шарнирно соединенные ведущий 9 и ведомый 10 рычаги управления ковшом 5. Свободным концом стрела 2 шарнирно соединена с кривошипно-шатунным механизмом, шатун 6 которого соединен с рукоятью 4. Ведущий рычаг 9 установлен с возможностью взаимодействия с упорами 7 и 8 на головной части стрелы 2. Шарнир соединения ведущего 9 и ведомого 10 рычагов выполнен с упорами 11 и 12, установленными с возможностью их взаимодействия с ведущим рычагом 9, а сами рычаги 9 и 10 соединены упругим элементом 13. Ведущий рычаг 9 перемещается шатуном 6 между упорами 7 и 8 при вращении кривошипа 1. При этом ковш 5 описывает траекторию без поворота относительно рукояти 4, так как упругий элемент 13 прижимает рычаг 9 к упору 11. При остановке рычага 9 на упоре 7 и продолжении движения рукояти 4 упругий элемент 13 растягивается, а рычаг 10 поворачивает ковш 5 относительно рукояти 4 до касания рычага 9 с упором 12. Упругий элемент 13 переходит через мертвое положение и фиксирует ковш 5. При остановке рычага 9 на упоре 8 движением рукояти 4 рычаг 10 перемещается и переводит упругий элемент 13 через мертвое положение, при этом ковш 5 фиксируется, а упор 11 контактирует с рычагом 9. 
Рис. 1. Кинематическая схема лабораторной установки
Описание лабораторной установки (модели)
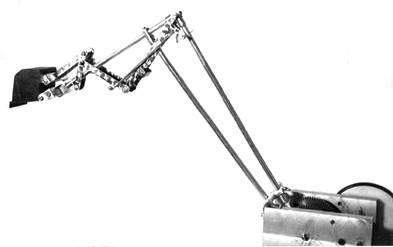
На рис. 2 приведен общий вид механизма с незамкнутой кинематической цепью (землеройная машина, транспортный ПР), выполненного по авт. свид. СССР №1469031, М. кл. E02F3/28. Модель механизма включает кривошип 1, стрелу 2 (рис. 2, 3), выполненную в виде качающейся кулисы и соединенную с кривошипом 1 посредством кулисного камня 3, закрепленного на его конце. Рукоять 4 шарнирно соединена со стрелой 2, ковшом (схватом) 5 и шатуном 6, который другим концом соединен с кривошипом 1. В верхней части стрелы 2 размещены упоры 7 и 8 (рис. 4), ограничивающие поворот ведущего рычага 9. Ведомый рычаг 10 шарнирно соединен с ведущим рычагом 9, а подвижность шарнира ограничена упорами 11 и 12. Рычаги 9 и 10 соединены упругими элементами 13. Кривошип 1 имеет механический привод (раздвоенная зубчатая передача, рис. 3) от электродвигателя, размещенного в корпусе. Для изменения рабочего пространства модели (параметров траектории) служат два подвижных соединения (соединения шатуна 6 с рукоятью 4 и шарнирная опора кулисы 2).
Рис. 2. Модель (общий вид)
Рис. 3. Механизм поворота
Рис. 4. Привод
Описание работы модели
Привести в действие модель (рис. 2) можно, воздействуя руками на элементы привода, либо путем включения электродвигателя в сеть. При вращении кривошипа 1 и перемещении ведущего рычага 9 между упорами 7 и 8 стрелы 2 ковш (схват) 5 описывает траекторию (шатунная кривая) без поворота относительно рукояти 4, поскольку упругие элементы 13 прижимают ведомый рычаг 10 к упору 11, фиксируя тем самым положение ковша (схвата) 5. Как только рычаг 9 коснется упора 7, он останавливается. Рукоять 4 продолжает свое движение и, растягивая упругие элементы 13, поворачивает ведомый рычаг 10. В результате ковш (схват) 5 за время выстоя ведущего элемента 9 у упора 7 поворачивается относительно рукояти 4 до тех пор пока упор 12 рычага 10 не коснется остановленного ведущего рычага 9. При этом упругие элементы 13, перейдя через мертвое положение шарнира, соединяющего рычаги 9 и 10, фиксируют положение ковша (схвата) 5 за счет прижатия рычага 10 к упору 12 (крайнее положение механизма поворота ковша 5). Дальнейшее вращение кривошипа 1 приводит к увеличению угла между стрелой 2 и рукоятью 4. Рычаг 9 отходит от упора 7 и ковш (схват) 5 перемещается в положение разгрузки как одно целое с рукоятью 4. Соприкосновение рычага 9 с упором 8 на стреле 2 приводит к его остановке. В это время рукоять 4 продолжает двигаться и, растягивая упругие элементы 13, поворачивает рычаг 10. В результате ковш (схват) 5 перемещается относительно рукояти 4 на разгрузку. После перехода упругих элементов 13 через мертвое положение шарнира, соединяющего рычаги 9 и 10, он способствует повороту ковша (схвата) 5 в новое фиксированное положение. Для изменения рабочего пространства ковша (схвата) 5 по ширине необходимо изменить точку закрепления шарнира, соединяющего шатун 6 и рукоять 4. Изменением точки качания кулисы (стрелы) 2 регулируют траекторию по высоте.
Порядок выполнения работы
1. Вычертить кинематическую схему устройства с заданным преподавателем положением ковша. 2. Не включая в сеть привод модели, выполнить следующие действия: 2.1. Внимательно изучить устройство и работу механизма по описанию. 2.2. Определить количество подвижных звеньев механизма (без привода). 2.3. Определить количество и классы кинематических пар, образующих механизм модели. 2.4. Составить структурную схему механизма. Пояснить, почему он имеет незамкнутую кинематическую цепь? 2.5. Определить степень свободы структурной схемы механизма. 2.6. Найти рабочее пространство конечного звена механизма. Для этого необходимо построить 6..8 положений конечного звена механизма. 2.7. Определить и назвать звенья, образующие механизм с выстоем. 2.8. Построить 4 положения механизма поворота ковша (схвата) 5. 2.9. Указать на рис. 2–4 все звенья механизма. 3. Действия этой группы выполняют при включении электропривода модели. 3.1. Закрепить на кромке ковша 5 фломастер так, чтобы он касался бумажного планшета. Включить электродвигатель и зафиксировать траекторию конечного звена механизма на планшете. 3.2. Сравнить полученную траекторию с формой рабочего пространства по п.2.6. Установить причины расхождения. 3.3. Переместить на 10 мм место крепления шатуна 6 к рукояти 4. Выполнить действия по п. 3.1., изменив цвет фломастера. 3.4. Проанализировать влияние расположения по длине рукояти 4 шарнира крепления к ней шатуна 6 на форму и размеры рабочего пространства механизма.
Форма отчета
Отчет по лабораторной работе должен содержать: 1. Кратко сформулированную цель работы. Определение кинематической цепи и, в частности, открытой (незамкнутой) кинематической цепи. 2. Структурную схему механизма в масштабе с использованием стандартных условных обозначений с нанесенными на нее позициями звеньев. 3. Расчет степени свободы механизма модели. 4. Эскиз рабочего пространства модели. 5. Образец действительной траектории конечного звена механизма модели при двух точках закрепления шатуна 6 к рукояти 4. 6. Выводы по работе.
Контрольные вопросы
1. Что такое незамкнутая кинематическая цепь? 2. Чем отличается незамкнутая кинематическая цепь промышленного робота от исследованной модели? 3. Как определить степень свободы кинематической цепи любого вида? 4. Каким механизмом можно заменить рычажный механизм поворота ковша (схвата)? Какие кинематические пары он должен иметь? 5. Что такое рабочее пространство промышленного робота? 6. Размеры каких звеньев сильнее всего влияют на размеры и форму рабочего пространства модели?
Лабораторная работа №36 |
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 404. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |