|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
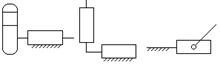
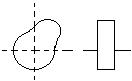
Составление кинематической схемы механизмаМеханизм – это система тел, предназначенная для преобразования движения одного или нескольких тел в требуемое движение других тел. Одно или несколько жестко соединенных твердых тел, входящих в состав механизма, называются звеном. Звено, принимаемое за неподвижное, называется стойкой. Кинематической парой называется соединение двух соприкасающихся звеньев, допускающее их относительное движение. Совокупность поверхностей, линий, точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом звена (элементом кинематической пары). Узел сопряжения – это совокупность поверхностей, линий, точек звена, по которым оно в данный момент соприкасается с другим звеном, образуя кинематическую пару. Узел сопряжения это часть элемента звена, которая непосредственно соприкасается с другим звеном. Элементами звеньев четырех подвижной кинематической пары, показанной на рис.1, а, служат наружная цилиндрическая поверхность одного звена и плоскость второго. Узлами являются два отрезка прямых, принадлежащие элементам звеньев и находящиеся в непосредственном контакте. Для кинематической пары, приведенной на рис.1, б, элементы звеньев – это наружная и внутренняя цилиндрические поверхности. Для втулки узел сопряжения и элемент кинематической пары совпадают - это ее внутренняя цилиндрическая поверхность. Для вала узлом служит та часть элемента звена (его внешней цилиндрической поверхности), которая в данный момент непосредственно контактирует с узлом сопряжения втулки.
б) а) Рис.1. Образованные звеньями кинематические пары, элементы и узлы сопряжения звеньев 
Кинематические пары бывают высшие и низшие. Низшие кинематические пары – это пары, звенья которых соприкасаются по поверхности, (узлы сопряжения представляют собой поверхности). Низшие кинематические пары бывают вращательные и поступательные и в плоских механизмах допускают только одну подвижность. Высшие кинематические пары – это такие пары, звенья которых имеют контакт по линии или по точке (узлы сопряжения звеньев - точки или линии). Совокупность звеньев, соединенных кинематическими парами, представляет собой кинематическую цепь. Кинематические цепи подразделяются на простые и сложные, замкнутые и незамкнутые. Механизмы, применяющиеся в инженерной практике, образованы замкнутыми кинематические цепями. Поэтому механизмом называется замкнутая кинематическая цепь, в которой при заданном движении одного или нескольких звеньев (ведущих) относительно стойки все остальные звенья (ведомые) совершают однозначно определенные движения. Для изучения механизма необходимо знать число и виды кинематических пар, число звеньев, их основные размеры и взаимное расположение. Все это изображается на кинематической схеме механизма условными обозначениями пар и звеньев. Условные обозначения установлены ГОСТ 2.770–68. Основные виды звеньев и кинематических пар приведены в таблицах 1и 2. Таблица 1 Основные виды звеньев, используемых в механизмах
Таблица 2 Основные виды кинематических пар
Матрица подвижностей кинематической пары имеет вид:
Кинематическая схема - это модель механизма, отражающая его строение и основные геометрические свойства его звеньев. Кинематическая схема может отражать строение механизма в масштабе или без соблюдения масштаба. В первом случае кинематическая схема должна показывать все параметры, необходимые для кинематического исследования механизма (длины звеньев, расстояния между центрами шарниров, расстояния до неподвижных направляющих, углы между плечами звеньев и т.д.). Конструктивные особенности механизма на кинематических схемах не показывают, чтобы не усложнять чертеж.
Используя размеры звеньев и метод засечек, кинематическую цепь механизма вычерчивают в масштабе на чертеже или с помощью какого-либо графического пакета (КОМПАC, AutoCAD, …). На рис.2 показана кинематическая схема плоского шарнирно-рычажного механизма для преобразования вращательного движения в поступательное, вычерченная в масштабе для заданного положения начального звена I. Масштабный коэффициент длины кинематической схемы механизма
Параметры звеньев (размеры даны в метрах) для построения кинематической схемы механизма приведены в таблице 3.
Таблица 3 Параметры звеньев механизма
Кроме кинематической схемы может быть построена структурная схема механизма. Структурная схема – это модель механизма (изделия), отражающая его строение. Кроме кинематической и структурной схемы для механизмов, как и для других изделий, может быть построена конфигурация структуры. Под конфигурацией изделия понимается представление совокупности его составных частей в виде иерархического дерева.
|
||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 518. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |








 ;
;  ,
, где
где  – поступательные подвижности вдоль осей
– поступательные подвижности вдоль осей  ,
,  ,
,  ,
,  – вращательные подвижности вокруг осей
– вращательные подвижности вокруг осей 
 м/мм. Масштабный коэффициент длины определяется как отношение реальной длинны звена
м/мм. Масштабный коэффициент длины определяется как отношение реальной длинны звена  (в метрах) к длине отрезка ОА (в миллиметрах), изображающего его на кинематической схеме, например,
(в метрах) к длине отрезка ОА (в миллиметрах), изображающего его на кинематической схеме, например,  . На примере этого механизма рассмотрим порядок структурного анализа по Ассуру, выявление избыточных связей и их устранение.
. На примере этого механизма рассмотрим порядок структурного анализа по Ассуру, выявление избыточных связей и их устранение.


