|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
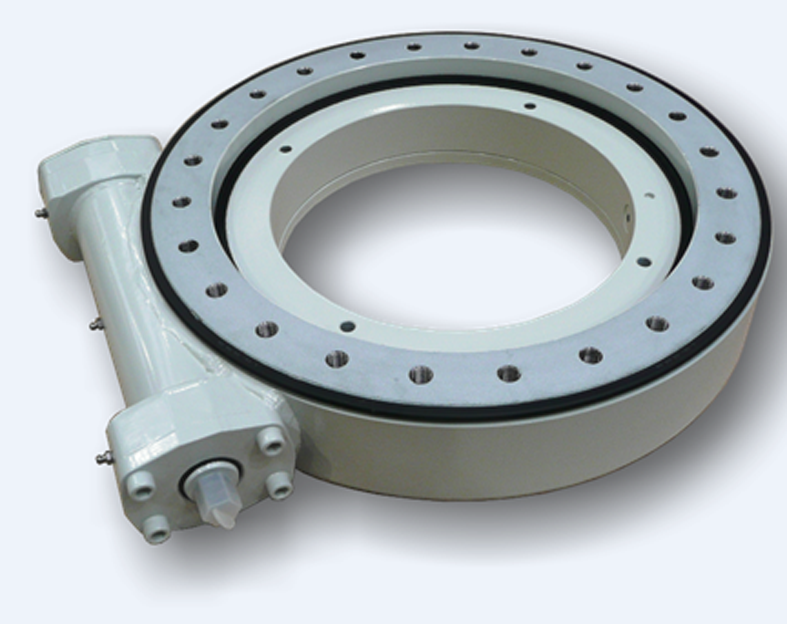
Опорно-поворотные устройстваВ настоящее время в кранах используются как оригинальные конструкции ОПУ, так и стандартные ОПУ отечественного и зарубежного производства. Причем стандартным изделиям отдается предпочтение. Опорно-поворотные устройства (ОПУ)выполнены из двух полуобойм, соединенных между собой телами качения и имеющих независимое вращение. Полуобоймы прикрепляются болтами к поворотной раме и корпусу машины. Зазор между роликами и полуобоймами регулируется с помощью прокладок. Имеются масленки для смазки дорожек качения и роликов. На рисунке 12.2 показан общий вид стандартного ОПУ с внутренним зубчатым зацеплением. В этой конструкции внешняя обойма 1 закрепляется на корпусе машины, внутренняя 2 – на поворотной части. Для крепящих болтов предусмотрены сквозные отверстия 3, смазки – пресс-масленка 4.
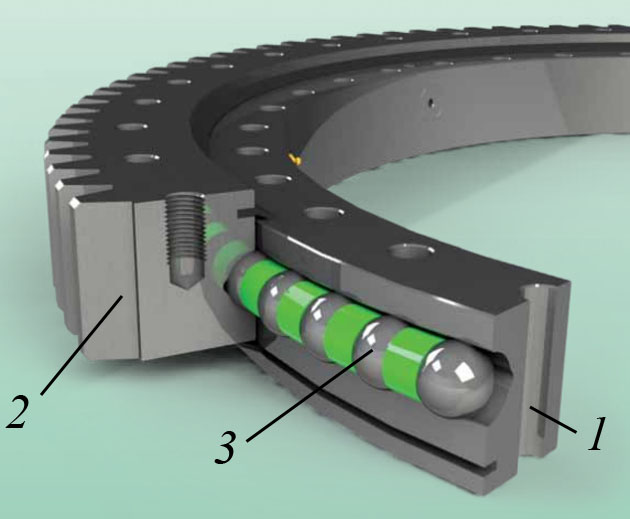
Рисунок 12.2 – Внешний вид опорно-поворотного устройства На рисунках 12.3…12.6 показаны фрагменты шариковых и роликовых ОПУ с зубчатыми колесами внешнего и внутреннего зацепления. Позицией 1 обозначены части ОПУ, которые связаны с неповоротной частью крана, позицией 2 – с поворотной частью крана. Позицией 3 обозначены тела качения, а позицией 4 пресс-масленки.
Рисунок 12.3 – Однорядные шариковые опорно-поворотные устройства: а – с внутренним зубчатым зацеплением;б – с внешним зубчатым зацеплением
Рисунок 12.4– Двухрядные шариковые опорно-поворотные устройства: а – с внутренним зубчатым зацеплением;б – с внешним зубчатым зацеплением
Рисунок 12.5 – Однорядные перекрестные роликовые опорно-поворотные устройства: а – с внешним зубчатым зацеплением; б – с внутренним зубчатым зацеплением 
Рисунок 12.6 – Опорно-поворотные устройства с тремя рядами роликов: а – внешним зубчатым зацеплением;б – с внутренним зубчатым зацеплением
В кранах-штабелерах подвесного или опорного типа механизм поворота размещается на кольцевой поворотной платформе (рисунок 2.8).
Привод ОПУ Привод механизма поворота может быть механический,гидравлический или ручной. Передаточные механизмы поворотных кранов разнообразны и включают: редукторы, открытые передачи и муфты предельного момента. Общее передаточное число механизма поворота получается большим (порядка 200...1000), поэтому большинство механизмов вращениясодержат червячный, волновой или планетарный редуктор иоткрытую зубчатую пару с большим передаточным числом (10...25). Стреловые краны небольшой грузоподъемности (до 3-х тонн) чаще выполняются с ручным механизмом поворота (рисунок 12.7, а).
Рисунок 12.7 – Кран стреловой с ручным механизмом поворота (а) и ручное опорно-поворотное устройство (б)
Этот кран включает жестко закрепленную колонну 1, размещенную внутри колонны подшипниковую опору 2, и поворотную часть, включающую стрелу 3 и тельфер 4. При этом для поворота крана используется круглозвенная цепь 5 с захватом, свисающая с конца стрелы. Угол поворота может составлять 240…360º. На рисунке 12.7, б показано опорно-поворотное устройство, объединенное с червячной передачей. Для поворота крана вручную червяк имеет квадратный хвостовик, выведенный наружу. Поворот платформы производится вращением червяка с помощью специального ключа. На практике привод ОПУ чаще выполняется по стандартной кинематической схеме: двигатель - тормоз - редуктор - приводнаяшестерня. При этом приводная станция в зависимости от конструктивного исполнения ОПУ, может закрепляться как на поворотной, так и на неповоротной части крана. На рисунке 12.8, а показан редуктор для вращения поворотной платформы крана в горизонтальной плоскости типа КС-3577.28.000, который используется во множестве отечественных автокранов (ИВАНОВЕЦ, КЛИНЦЫ и др.). Он представляет собой двухступенчатый цилиндрический редуктор с выходной шестерней (13 зубьев). Прямозубая шестерня1 выступает в качестве связующего элемента между поворотной и неповоротной частью крана, так как аналогичную форму имеют зубья колеса 2в ОПУ (рисунок 12.8, б).
Рисунок 12.8 – Редуктор (а) и взаимодействие шестерни привода с зубчатым колесом ОПУ (б)
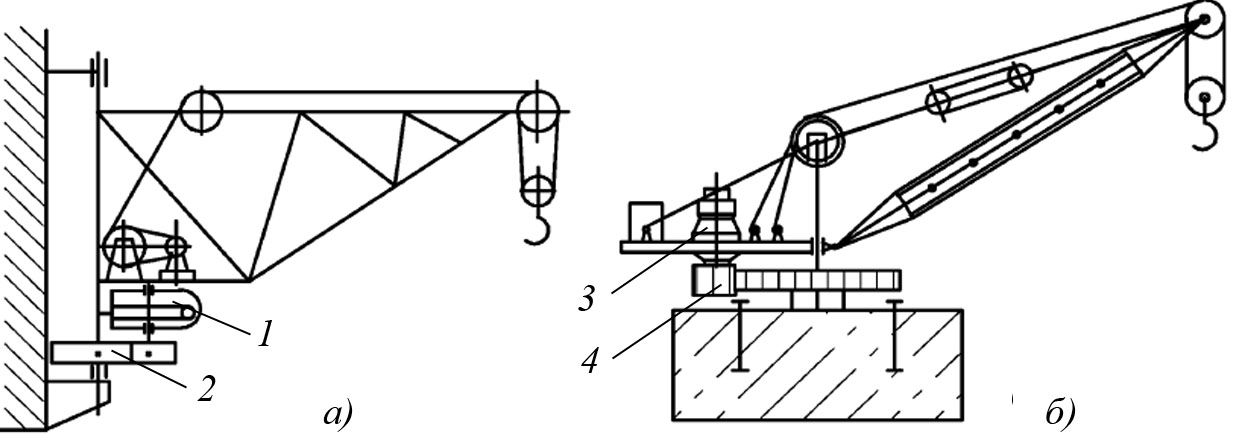
На автотранспортных предприятиях для обслуживания оборудования и аппаратов применяют стационарные консольные поворотныекраны. Наиболее часто используемые в этих кранах принципиальные схемы механизмов поворота приведены на рисунке 12.9. Настенный поворотный кран, показанный на рисунке 12.9, а, оснащен ручным механизмом поворота, включающим червячную передачу 1 и открытое прямозубое цилиндрическое зацепление 2. Консольный свободностоящий кран, показанный на рисунке 12.9, б, оснащен электромеханическим приводом, включающим мотор-редуктор 3 и открытую цилиндрическую передачу 4.
Рисунок 12.9 – Схемы механизмов поворота консольных кранов
По подобным схемам строятся поворотные системы и других типов кранов.
Расчет механизма поворота Определение параметров механизма поворота крана, как и любого механизма, начинается с определения внешних нагрузок, которые необходимопреодолевать при повороте крана. Эти нагрузки удобно представлять в видемоментов сопротивления повороту крана. Максимальный момент сопротивление повороту Тсдолжен учитывать все нормативные нагрузки:
где Ттр – момент сил трения ОПУ; Тв – момент ветровых нагрузок; Ту – момент сил тяжести при уклоне опорной поверхности; Тин – момент инерционных сил. Момент сил трения в ОПУ определяют по формуле
где Dопу – диаметр ОПУ по осям тел качения;w – приведенный коэффициент сопротивления вращению: для шариковыхОПУ w = 0,01; для роликовых ОПУ w = 0,012;Qпов– cила тяжести поворотной части крана;Qгр – сила тяжести номинального груза; γ – угол между вертикалью и линией, проходящей через точки контакта тел качения с дорожками катания. Момент сопротивления сил ветра повороту крана определяют в соответствии с расчетной схемой на рисунке 12.10.
где Fвi– сила давления ветра на поворачивающийся элемент крана; ri– расстояние от оси вращения крана до центра приложения силы ветрового давления на поворачивающийся элемент крана; Fвгр– сила давления ветра на груз;L – расстояние от оси вращения крана до центра приложения силы.
Рисунок 12.10 – Схема действия сил ветра
Момент сопротивления повороту при работе крана на опорной поверхности с уклоном определяют по формуле:
гдеrцт– расстояние от оси вращения до центра тяжести поворотной части крана; L– максимальный вылет груза; β– угол наклона крана. Момент сил инерции
где nкр– номинальная частота вращения крана;Jгр– момент инерции груза относительно оси вращения крана:Jгр= QL2;Jкр– момент инерции крана относительно оси вращения: Определение мощности двигателя механизма поворота следует выполнять с учетом непостоянства действующих нагрузок от ветра и уклона опорной поверхности:
где ηтр– КПД трансмиссии механизма поворота, ηтр ≈ 0,95;ψ – кратность пускового момента двигателя:у двигателей с фазным ротором ψ ≈ 1,5; с короткозамкнутым ротором – ψ ≈ 2,5. Общее передаточное число трансмиссии
где iред– передаточное число унифицированного (стандартного) редуктора;iоп – передаточное число открытых передач. По полученным данным производят расчет и подбор редуктора, тормоза, открытых зубчатых передач и других механизмов.
Лекция № 13 (2 часа) МЕХАНИЗМизменения вылета План лекции 13.1Полиспастный механизм изменения вылета. 13.2Механические механизмы изменения вылета. 13.3 Изменение вылета стрелы тележкой с канатной тягой. 13.4 Сопротивление передвижению тележки с канатной тягой. |
||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 1792. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

 а)
а)
 б)
б)






 а)
а)
 б)
б)
 а)
а)
 б)
б)






 tп– время разгона (пуска) двигателя до установившейся частоты вращения механизма; tп≈ 3…5 с при вылете груза 5…10 м; tп≈ 5…10 с при вылете груза 10…30 м.
tп– время разгона (пуска) двигателя до установившейся частоты вращения механизма; tп≈ 3…5 с при вылете груза 5…10 м; tп≈ 5…10 с при вылете груза 10…30 м.
