|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Классификация систем автомат регулирования по осн и др признакамСтр 1 из 27Следующая ⇒ Системы автоматического регулирования (САР) являются составной частью более общей группы систем автоматического управления. Вследствие большого разнообразия систем автоматического регулирования, широкого диапазона их функциональных возможностей и принципов построения и, учитывая множество форм конструктивной реализации САР, в качестве их основного классификационного признака можно принять используемую системой информацию (совокупность сведений о технологическом процессе и регуляторе). Таким образом, основными классификационными признаками примем начальную и рабочую информацию. Начальной информацией называется совокупность сведений о технологическом процессе, подлежащем автоматизации, и системе регулирования этого процесса, известной до построения и начала функционирования этой системы. Например, при разработке системы автоматического регулирования сушильного шкафа необходимо знать теплоемкость объекта, температуру окружающей среды, характер ожидаемых возмущающих воздействий, допустимое отклонение температуры от заданного значения, требования, предъявляемые к системе автоматического регулирования и пр. Если имеется достаточная начальная информация в объеме, позволяющем разработать систему, обеспечивающую требуемую точность регулирования, такую информацию можно назвать полной начальной информацией. Системы регулирования, требующие для своей разработки полной начальной информации, называются обыкновенными системами автоматического регулирования Системы регулирования, разработанные с таким расчетом, чтоб они обеспечивали необходимую точность регулирования при неполной начальной информации, называют самонастраивающимися системами автоматического регулирования.  Вторым основным классификационным признаком является рабочая информация. Это понятие охватывает совокупность сведений о текущем состоянии технологического процесса, получаемых и используемых при осуществлении процесса автоматического управления. Рабочая информация передается в виде сигналов, содержащих сведения об изменениях параметров (температура, давление и т.п.), характеризующих протекание технологического процесса в соответствии с управляющим воздействиям.
2.Передат ф-ии,прямые и обратные L-преобр-ия Лапласа,интеграл Лапласа,диф ур-е эл-та регулирующей системы Дифференциальное уравнение (ДУ) элемента регулирующей системы связывает выходные величины с входными величинами и в общем случае имеет вид: где Если в уравнении (2.1) вместо функций времени
то оказывается, что дифференциальное уравнение, содержащее функции
Такой переход от дифференциального уравнения к однозначно соответствующей алгебраической форме называется преобразованием Лапласа. Математически прямое преобразование Лапласа записывается условно с помощью символа
Операция перехода от изображения
Возможна запись соответствия между оригиналом и изображением по аналогии с таблицей
Практически переход от дифференциального уравнения к алгебраическому уравнению происходит без каких-либо вычислений. Если сравнить уравнение (2.1) с уравнением (2.3), то нетрудно заметить, что формальный переход от дифференциального уравнения к алгебраическому при нулевых начальных условиях получается путем замены символов дифференцирования оригиналов функций Вынося в уравнении (2.3) за скобки
Определим из уравнения (2.4) отношение изображения выходной величины к изображению входной:
Передаточная функция
Из уравнения (2.5) следует, что передаточная функция элемента системы |
||
|
|
Последнее изменение этой страницы: 2018-04-11; просмотров: 472. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 (2.1)
(2.1) – выходная величина элемента (в отклонениях от состояния
– выходная величина элемента (в отклонениях от состояния  – входная величина элемента (в отклонениях от состояния
– входная величина элемента (в отклонениях от состояния  – постоянные коэффициенты, определяемые конструктивными
– постоянные коэффициенты, определяемые конструктивными и
и  ввести функции
ввести функции  и
и  комплексного переменного
комплексного переменного  , поставив условием, что эти функции связаны зависимостями
, поставив условием, что эти функции связаны зависимостями (2.2)
(2.2) и
и  при нулевых начальных условиях (при
при нулевых начальных условиях (при 
 ) равносильно линейному алгебраическому уравнению, содержащему функции
) равносильно линейному алгебраическому уравнению, содержащему функции  и
и  :
: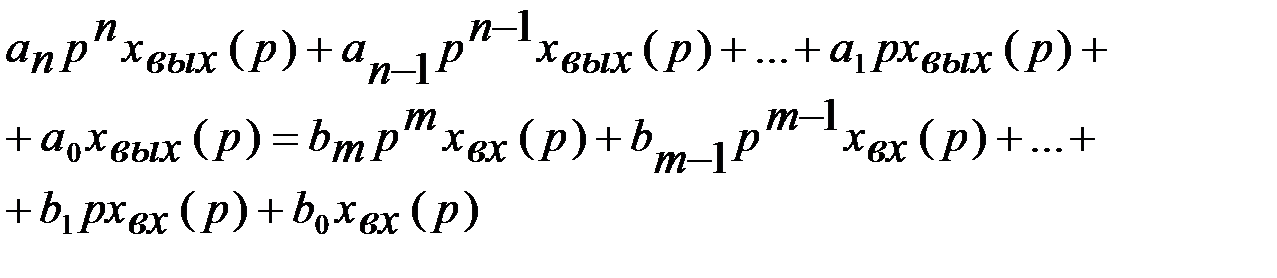 (2.3)
(2.3) как
как
 к искомой функции
к искомой функции  (нахождение оригинала от изоб помощью символа
(нахождение оригинала от изоб помощью символа  как
как

 соответственно
соответственно  и функций
и функций  – их изображениями
– их изображениями  . С комплексной переменной
. С комплексной переменной  , как и с другими членами алгебраического уравнения, можно производить различные действия: умножение, деление, вынесение за скобки и т.д.
, как и с другими членами алгебраического уравнения, можно производить различные действия: умножение, деление, вынесение за скобки и т.д. и
и  , получим:
, получим: (2.4)
(2.4) (2.5)
(2.5) является дробно-рациональной функцией комплексной переменной
является дробно-рациональной функцией комплексной переменной  :
: ,(2.6) где
,(2.6) где – полином степени
– полином степени  ,
, – полином степени
– полином степени  .
. и изображение его входной величины определяют изображение выходной величины:
и изображение его входной величины определяют изображение выходной величины: .
.