|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
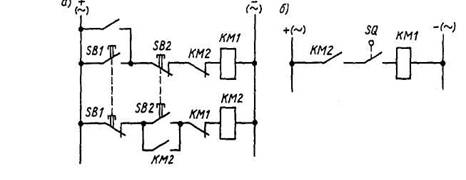
Блокировочные связи и сигнализация в схемах автоматического управления электроприводами. Электрические блокировки в схемах ЭПслужат для обеспечения заданной последовательности операций при управлении, предотвращения нештатных и аварийных ситуаций, а также для предотвращения последствий неправильных действий оператора, что значительно повышает надежность работы ЭП и технологического оборудования. Так, например, перекрестное включение размыкающих контактов контакторов КМ1 и КМ2 в цепи катушек не допускает включения одного из них при включенном другом. Такая блокировка применяется в реверсивных ЭП, где недопустимо! одновременное включение двух контакторов, или в ЭП с электрическим торможением двигателя, где торможение может начаться только после отключения двигателя от сети.
Сигнализация в схемах управления ЭП.При контроле хода технологического процесса, последовательности выполнения операций, состояния защиты ЭП, наличия напряжения питания или ка-. кого-либо электрического сигнала, в случае отклонения от нормы применяется сигнализация, которая может быть световой (сигнальные лампы, табло),', звуковой (звонок, сирена) и визуальной, (указательные реле, измерительные;; приборы). На рис. 10.19 показана возможная сигнализация в схеме управления ЭП.;; Здесь лампа НЫ сигнализирует о подаче напряжения на схему (включение.) 
Билет№23 Системы автоматизации мобильных машин. Автоматическое управление глубиной пахоты. 1. Автоматическое управление глубиной вспашки предназначено для стабилизации глубины вспашки (хода плугов, лемехов и других рабочих органов). Практическое применение нашли силовой, высотный и комбинированный способы стабилизации глубины вспашки. Силовой способ основан на том, что тяговое сопротивление плуга зависит от глубины вспашки. При увеличении (уменьшении) тягового сопротивления специальная пружина, установленная между трактором и плугом, сжимается (разжимается) и перемещает шток и поршень управляющего гидрозолотника. При этом последний перераспределяет (под давлением от насоса) поток масла (гидравлической жидкости) в соответствующие полости силового гидроцилиндра, который осуществляет выглубление (заглубление) лемехов плуга до заданного тягового усилия. Такой способ позволяет также стабилизировать нагрузку трактора и обеспечивать экономичную работу его двигателя. Силовой способ эффективен в работе преимущественно на однородных по составу почвах при постоянной скорости движения трактора, т. е. когда тяговое усилие трактора пропорционально глубине хода лемехов плуга. Высотный способ применяют для неоднородных почв. В устройстве перед плугом / устанавливают опорное колесо (датчик глубины), механически соединенное со штоком гидрозолотника.При изменении глубины вспашки шток перемещается, и окна и гидрозолотника открываются. Через них масло под давлением поступает в гидроцилиндр, который регулирует высоту плуга, восстанавливая необходимую глубину его хода. Комбинированный способ объединяет принципы и устройства силового и высотного способов управления глубиной хода рабочих органов МСА. |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 434. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |