|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Кинематика поступательного движенияв неинерциальной системе отсчета
Пусть м. т. А движется относительно неинерциальной системы отсчета «НИ» (координаты – x*, y*, z* ). Сама система движется относительно инерциальной (неподвижной) системы отсчета (x, y, z) поступательно с ускорением а0 (рис. 26). Согласно рис. 26 имеем где Рассмотрим случай, когда неинерциальная система отсчета движется относительно инерциальной системы отсчета поступательно с ускорением а0. Всякое движение в пространстве осуществляется с течением времени, поэтому, дифференцируя по времени дважды выражение (48), получим
Согласно определению мгновенного ускорения, имеем где а0 – переносное ускорение, вызванное поступательным движением подвижной «НИ» системой отсчета относительно инерциальной; аотн – относительное ускорение, вызванное движением т. А относительно подвижной «НИ»; а – полное (абсолютное) ускорение т. А относительно инерциальной системы отсчета «И»: Вывод: Вектор полного ускорения м. т. равен геометрической сумме векторов переносного и относительного ускорений.
Сила инерции Второй закон Ньютона является законом поступательного движения в инерциальных системах отсчета, т. е.  Поскольку в движении участвует м. т. А, с массой m, то умножим равенство (50) на m и получим уравнение движения м. т. А в рассматриваемом случае: или где F – сила, действующая на м. т. А. Тогда называется силой инерции. Особенность сил инерции заключается в том, что они не являются результатом взаимодействия м. т. или тел, а возникают при ускоренном движении подвижной системы отсчета. При движении «НИ» системы отсчета с другим ускорением изменяется и поступательная сила инерции. В таких случаях говорят, что сила инерции не инвариантна относительно «НИ» системы отсчета. Кроме того, для таких систем не выполняется третий закон Ньютона, т. к. нет взаимодействующих тел. Однако эти силы столь же реальны, например, при торможении транспорта пассажира толкает вперед.
|
|||
|
|
Последнее изменение этой страницы: 2018-05-31; просмотров: 436. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 , (48)
, (48) – радиус-вектор, соединяющий начала ОО* систем отсчета;
– радиус-вектор, соединяющий начала ОО* систем отсчета;  – радиус-вектор, характеризующий положение т. А относительно подвижной системы отсчета;
– радиус-вектор, характеризующий положение т. А относительно подвижной системы отсчета;  – радиус-вектор, характеризующий положение т. А относительно неподвижной системы отсчета.
– радиус-вектор, характеризующий положение т. А относительно неподвижной системы отсчета.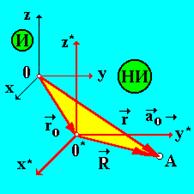
 . (49)
. (49) , (50)
, (50) .
.
 , (51)
, (51) – (52)
– (52)