|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Анализ замкнутой системы управленияСтруктурная схема замкнутой системы управления приведена на рис.4.9 .
Рис.4.9. Структурная схема системы управления На рис. 4.10. рассогласование приведено для точки Н5,4,4,4, а изменение напора для добывающей скважины (точки Н4.4.4.4). Результаты моделирования показывают, что синтезированный регулятор достаточно эффективно управляет рассматриваемым гидродинамическим процессом и может быть рекомендован к реализации в реальных системах.
Рис.4.10. График переходного процесса
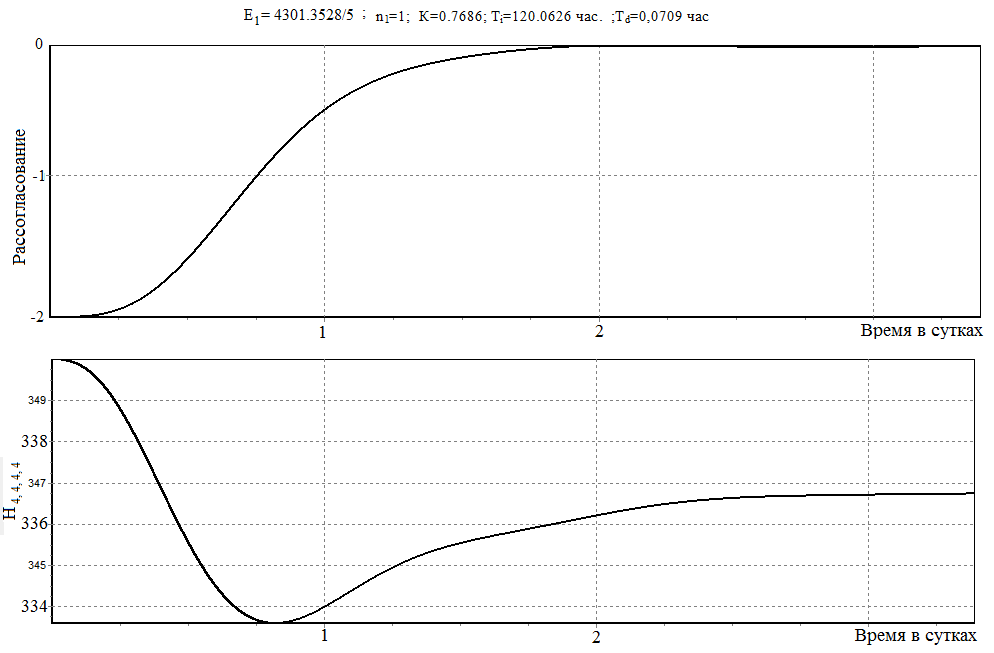
Как известно, одно из требований к системам управления гидролитосферными процессами, формулируется в виде минимизации перерегулирования в переходном процессе. Это требование может быть выполнено, путем коррекции коэффициента усиления Е1 (например Е1= 4301.3528/5) в рассматриваемой системе управления. Графики переходного процесса в скорректированной системе управления приведены на рис 4.11 . (рассогласование приведено для точки Н5,4,4,4, а изменение напора для добывающей скважины (точки Н4.4.4.4)).
Рис.4.11. График переходного процесса при коррекции коэффициента усиления
4.3.4. Синтез распределенных регуляторов для систем управления параметрами верхнего и среднего гидролитосферных пластов Расположение добывающих и контрольных скважин приведено на рис.4.12. Поскольку в Кисловодском месторождении осуществляют добычу трех видов нарзанов (см. рис. 4.12) сульфатного, доломитного и общего, рассмотрим проектирование систем управления параметрами добывающих скважин общего и доломитного нарзана (проектирование системы управления параметрами добывающих скважин сульфатный нарзан приведено выше). 
Рис. 4.12. Схема расположения добывающих и контрольных скважин
Математическая модель гидролитосферных процессов записывается в виде
,
,
где: h1 – напор в горизонте грунтовых вод; Нi – напор в изучаемом i- м водоносном горизонте (i=2..4); Vi(yi,j,τ) –понижение напора i-го пласта, вызванное воздействием j-ой добывающей скважиной ( в рассматриваемом случае j=1..4, а входное воздействие рассматривается в трех пластах i=1..3); δi(x0,j, y0,j, z0,j)- функция, равная единице, если x=x0,j, y=y0,j, z=z0,j, для i-го пласта и равная нулю в других случаях ( i=2..4);
Fi,x-скорость течения вi- м водоносном горизонте(i=2..4); x,y,z- пространственные координаты; τ-время. Граничные условия между пластами задаются в виде (условия Дарси)
Грунтовые воды- верхний пласт
Верхний пласт - средний пласт
Средний пласт - нижний пласт
Нижняя граница нижнего пласта
bi–параметры перетекания i-го пласта (i=1..3). Нижняя граница нижнего пласта
Боковые грани.
При формировании граничных условий по координате y, полагаем, что мощность пластов такова, что возмущения от заборных скважин не влияют на состояние пласта в граничных точках
где: h1,0, Н2,0, Н3,0, Н4,0 - начальные состояния невозмущенных грунтовых вод и пластов. Поскольку приведенная математическая модель объекта управления не имеет аналитического решения, то для оценки динамики объекта составим дискретную модель объекта управления. Как и для случая, рассмотренного выше, была составлена дискретная модель объекта управления, используя которую была составлена вычислительная программа для анализа динамических характеристик объекта управления. Входным воздействием на объект управления служит функция Ui,j(τ) , которая связана с функцией Vi(yi,j,τ) –понижение напораi-го пласта, вызванное воздействием j-ой добывающей скважиной (в рассматриваемом случае j=1..4, i=1..2) следующим соотношением Vi(yj,τ) =0.001∙Ui,j. Методика проведения экспериментальных исследований (определения реакции системы на заданную пространственную моду входного воздействия ) описана выше. В установившемся режиме, скачком подаем входное воздействие на объект управления в виде выбранной пространственной моды. В рассматриваемом случае входное воздействие реализуется с помощью 4-х добывающих скважин. Полагая, что воздействие от первой и последней добывающих скважин, на расстоянии 2∙Δy, при скачкообразном понижении напора, равно нулю, то входное воздействие может быть записано в виде Ui,j= Ai sin(ψξ∙yj), ψξ=π∙ξ/(8-1), y=(j-1)∙Δy, Gξ=( π∙ ξ /((8-1)∙ Δy))2, где: ξ - номер моды; j- точки расположения добывающих скважин реализующих i-тое входное воздействие ; Δy- шаг дискретизации по оси y; Gξ-значения обобщенной координаты [1,2] .
Рис.4.13. 1-й пласт, 1-я мода
Рис. 4.14. 1-й пласт, 3-я мода
Рис.4.15. 2-й пласт, 1-я мода
Рис.4.16. 2-й пласт, 3-я мода
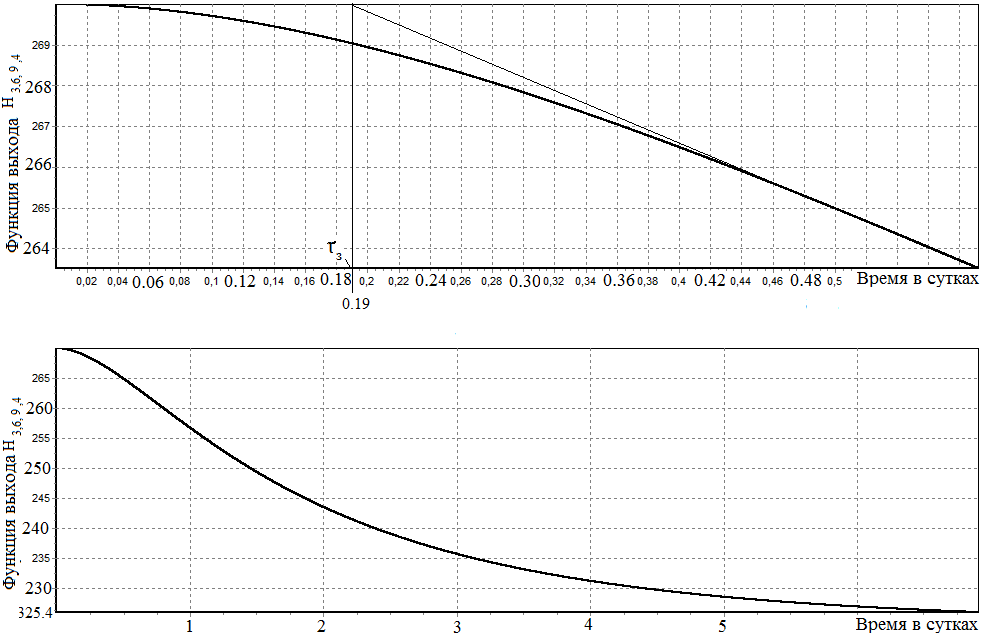
Аппроксимируем передаточную функцию по выбранным пространственным модам передаточной функцией вида
где υ – номер пласта. В результате численного моделирования получены следующие значения параметров передаточной функции, при условии, что входное воздействие Ui,j связано с функцией понижения напора следующим соотношением Vi,j (yj,τ) =0.001∙ Ui,j, (в рассматриваемом случае j=1..4, i=1..3): Для первого пласта (см. рис. 4.13, 4.14) получим: первая мода η=1, G1=(π∙1/350)2=8.057∙ 10-5 , К1(G1)= 110/(1∙(sin(π∙3/7))=112.8 , T1(G1)=(5.125-0.21)∙24=117.96час.,τз(G1)= 5.04час.; третья мода η=3 , G3= 7.25∙ 10-4 , К1(G3)= 74/(1∙(sin(π∙3∙3/7))=94.6 , T1(G3)=(4.47-0.2)∙24=102.48час., τз(G3)= 4.8 час. Для второго пласта (см. рис. 4.15, 4.16) получим: первая мода η=1, G1=8.057∙ 10-5 , К2(G1)= 44.6/(1∙(sin(π∙3/7))=45.75 , T2 (G1)=(3-0.19)∙24=67.44час.,τз(G1)= 4.56час.; третья мода η=3 , G3= 7.25∙ 10-4 , К2(G3)= 29.2/(1∙(sin(π∙3∙3/7))=37.35 , T2(G3)=(2.5-0.16)∙24=56.16час., τз(G3)= 3.84час.
Синтез распределенных регуляторов В соответствии с методикой синтеза выполним следующие этапы: 1.Синтезируем регулятор ПИД. Используя передаточную функцию (4.5) и вычисленные значения параметров по первой пространственной моде первого пласта, синтезируем регулятор, реализующий пропорционально – интегрально -дифференциального закона управления (ПИД). В процессе синтеза ПИД по первой пространственной моде (η=1, К1 (G1)=112.8 , T1 (G1)=117.96час.,τз(G1)= 5.04 час.) частотным методом сосредоточенных систем ( с использованием программного комплекса МИРЭА) , получены значения параметров регулятора ПИД
где: К=0.2256 ;Ti=6501.9час. ;Td=0.0033час. (Δ=4) , (запас устойчивости по фазе был выбран Δφ=π/6). В процессе синтеза ПИД по первой пространственной моде второго пласта (η=1,К2(G1)=45.75 ,T2 (G1)=67.44час.,τз(G1)= 4.56час) частотным методом сосредоточенных систем ( с использованием программного комплекса МИРЭА), получены значения параметров регулятора ПИД
где: К=0.3589; Ti=1146.6 час. ; Td=0.0148 час. (Δ=4) ,(запас устойчивости по фазе был выбран Δφ=π/6). 2.Оптимизируем выбор значений параметров β и r. 2.1. Выберем параметры β и r, обеспечивающие минимальный статический коэффициент усиления разомкнутой системы по первой моде первого пласта. Для этого, используя модифицированную передаточную функцию разомкнутой системы и изменяя значения параметров β и r (abs(β)>abs(r)) , определим соотношение параметров r/β, обеспечивающее минимальный модифицированный статический коэффициент усиления рассматриваемой разомкнутой системы Re(Wс1(G1,jω1=0)) (см. рис.4.17). Результаты вычислений показывают, что минимальный модифицированный статический коэффициент обеспечивает соотношение параметров r/β=0.6585 .
Рис. 4.17. Оптимизация параметров β и r по первой пространственной моде разомкнутой системы первого пласта
2.2.Выберем параметры β и r, обеспечивающие минимальный статический коэффициент усиления разомкнутой системы для второго пласта по первой моде. Для этого, используя модифицированную передаточную функцию разомкнутой системы и изменяя значения параметров β и r (abs(β)>abs(r)) , определим соотношение параметров r/β, обеспечивающее минимальный модифицированный статический коэффициент усиления рассматриваемой разомкнутой системы Re(Wс2(G1,jω1=0)) (см. рис.4.18). Результаты вычислений показывают, что минимальный модифицированный статический коэффициент обеспечивает соотношение параметров r/β=0.6097 .
Рис. 4.18. Оптимизация параметров β и r по первой пространственной моде разомкнутой системы второго пласта
3. Синтезируем распределенный регулятор, реализующий статический закон управления. 3.1. Построим модифицированные годографы разомкнутой системы по выбранным пространственным модам, с учетом вычисленных значений параметров r/ β, при этом выберем значение β=-0.6. Для первого пласта r=-0.3951 .
Рис.4.19. Модифицированный годограф разомкнутой системы первого пласта Для второго пласта r =-0.36585
Рис. 4.20. Модифицированный годограф разомкнутой системы второго пласта
3.2. Синтезируем распределенный регулятор, реализующий статический закон управления для первого пласта. Передаточная функция такого регулятора, имеет вид [1,2,15]
где x, y – пространственные координаты;
n1 – весовой коэффициент ( Передаточная функция регулятора, записанная с использованием обобщенной координаты (G), может быть представлена в виде W1= E1((n1-1)/n1+ G/n1) . Определим желаемые коэффициенты усиления регулятора
Для определения параметров распределенного регулятора запишем следующие уравнения
Поделив (4.7) на (4.6), придем к следующему результату: где Подставляя вычисленные значения, получим
где Для вычисления значения Е1, подставим вычисленное значение
Передаточная функция синтезированного распределенного регулятора для первого пласта может быть записана в виде:
где: Е1= 4046.17; n1=1; К=0.2256 ; Ti=6501.9час. ; Td=0.0033 час.
3.3. Синтезируем распределенный регулятор, реализующий статический закон управления для второго пласта. Передаточная функция такого регулятора имеет вид W2= E2((n2-1)/n2+ G/n2) [1,2]. Для выбранных пространственных мод (G1 и G3, см. рис. 4.20) определим желаемые коэффициенты усиления и параметры регулятора
Передаточная функция распределенного регулятора для второго пласта может быть записана в виде
где: Е2= 3922; n2=1; К=0.3589; Ti=1146.6 час.; Td=0.0148 час.
4.3.5. Анализ замкнутых систем управления Параметры распределенных регуляторов для первого и второго пластов, используемые при моделировании замкнутой системы получены в п. 4.3.4, а параметры распределенного регулятора и переходные процессы для третьего пласта получены в п.4.3.2, п.4.3.3 . Структурная схема замкнутой системы управления приведена на рис.4.21 Входное воздействие (целевая функция) на объект управления формировалось в виде следующей функции Fυ = Нυ+1,0 -2 (где υ – номер пласта (υ=1,1,3 )). Функция рассогласования (см. рис.4.22) приведены для точки установки 2-й контрольной скважины в изучаемых пластах. Аналогичные функции получены и для точек установки остальных контрольных скважин.
Рис.4.21. Структурная схема системы управления
Рис.4.22. Графики переходных процессов
Как следует из результатов моделирования, синтезированные распределенные регуляторы достаточно эффективно управляют рассматриваемыми гидродинамическим процессом в пластах и могут быть рекомендован к реализации в реальных системах (см. рис. 4.22).
|
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 390. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |



 Грунтовые воды
Грунтовые воды
 Верхний пласт
Верхний пласт
 Средний пласт
Средний пласт
 Нижний пласт
Нижний пласт 
 - коэффициенты фильтрации по пространственным координатам в горизонте грунтовых вод (i=1) и i-го пласта (i=2..4);
- коэффициенты фильтрации по пространственным координатам в горизонте грунтовых вод (i=1) и i-го пласта (i=2..4); – упругоемкость i-го пласта (i=2..4);
– упругоемкость i-го пласта (i=2..4); ,
, .
. ,
, .
. ,
, .
. .
. ,
, .
.
 ,(i=2..4),
,(i=2..4),


 ,( υ=1,2 ), (4.5)
,( υ=1,2 ), (4.5) ,
, ,
,



 ,
, - заданное число (общий коэффициент усиления);
- заданное число (общий коэффициент усиления); - лапласиан; s -оператор Лапласа;
- лапласиан; s -оператор Лапласа; ).
). для выбранных пространственных мод (G1 и G3, см. рис. 4.19)
для выбранных пространственных мод (G1 и G3, см. рис. 4.19)
 .
. , (4.6)
, (4.6)  . (4.7)
. (4.7) , (4.8)
, (4.8) .
. ,
,  .
. в (4.6) и преобразуя, получим
в (4.6) и преобразуя, получим .
. ,
, ,
,  .
.
 .
. .
. ,
,
