|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Сравнение переходных процессовСравним полученный переходный процесс, приведенный на рис. 2.24 с переходным процессом рис. 3.2.
Рис. 3.3. Сравнение переходных процессов
Формирование областей качественного расположения пространственных мод, параметры которых связаны с показателями качества процессов проектируемой системы, диктуется практической необходимостью повышения качества процессов управления в распределенных системах. Результаты моделирования (см. рис. 3.3) показывают, что предлагаемая методика синтеза, использующая модифицированный годограф и частотные методы синтеза сосредоточенных и распределенных систем может быть использована при синтезе различных законов управления для систем с распределенными параметрами. По сути эта методика распадается на два этапа : - на первом этапе, методами сосредоточенных систем синтезируется заданный закон управления; - на втором этапе, с использованием модифицированного годографа разомкнутой системы, синтезируются параметры пространственно-усилительного звена.
ГЛАВА 4. СИНТЕЗ СИСТЕМЫ УПРАВЛЕНИЯ ПАРАМЕТРАМИ ГИДРОЛИТОСФЕРНОГО ПРОЦЕССА КИСЛОВОДСКОГО МЕСТОРОЖДЕНИЯ МИНЕРАЛЬНЫХ ВОД В главе приводится математические модели гидролитосферных процессов Кисловодского месторождения минеральных вод, показа методика синтеза распределенных регуляторов для рассматриваемых процессов, с использованием качественной теории. Математическая модель кисловодского месторождения Минеральных вод Рассматриваемые математические модели описывают процесс фильтрации в рассматриваемых пластах (коллекторах) и взаимосвязей между пластами.  Схема Кисловодского месторождения минеральных вод в разрезе приведена на рис.4.1. Математическая модель гидролитосферных процессов рассматриваемого месторождения может быть записана в виде [14,15]
Рис. 4.1. Схема месторождения
Средний пласт
,
где: h1 – напор в горизонте грунтовых вод; Нi – напор в изучаемом i- м водоносном горизонте (i=2..4);
Fi,x-скорость течения в i- м водоносном горизонте (i=2..4); V(yj,τ) –понижение напора, вызванное воздействием j-ой добывающей скважиной (в рассматриваемом случае j=1..4, а входное воздействие осуществляется только на нижний пласт); δ(x0,j, y0,j, z0,j)- функция, равная единице, если x=x0,j, y=y0,j, z=z0,j, и равная нулю в других случаях; x,y,z- пространственные координаты; τ-время. Граничные условия между пластами задаются в виде (условия Дарси) Грунтовые воды - верхний пласт
Верхний пласт - средний пласт
Средний пласт - нижний пласт
где bi–параметры перетекания i-го пласта (i=1..3).
Нижняя граница нижнего пласта
Боковые грани.
При формировании граничных условий по координате y, полагаем, что мощность пластов такова, что возмущения от заборных скважин не влияют на состояние пласта в граничных точках
где: h1,0, Н2,0, Н3,0, Н4,0 - начальные состояния невозмущенных грунтовых вод и пластов. Поскольку приведенная математическая модель объекта управления не имеет аналитического решения, то для оценки динамики объекта составим дискретную модель объекта управления. 4.2. Дискретная модель объекта управления Используя приведенную выше математическую модель объекта управления, запишем дискретную модель.
Грунтовые воды
Верхний пласт
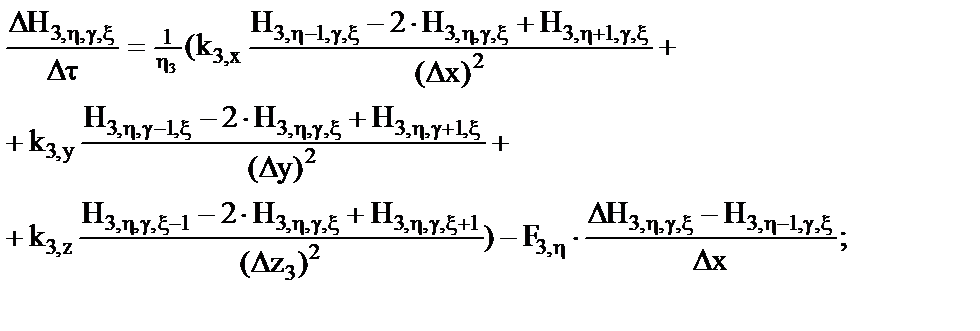
Средний пласт
Нижний пласт
где: Nzi – число точек дискретизации i-го пласта по координате z (i=1...4). Аналогичным образом запишем дискретные модели граничных условий.
Грунтовые воды - верхний пласт
Верхний пласт - средний пласт
Средний пласт - нижний пласт
Нижняя граница нижнего пласта
Для формирования граничных условий по координате y, полагаем мощность пластов такова, что возмущения от заборных скважин не влияют на состояние пласта в граничных точках
где: h1,0,ξ ,Нi,0 – начальное состояние i-го невозмущенного пласта; bi - параметры перетекания (i=1..3).
4.3. Синтез распределенной системы управления 4.3.1. Определение динамических характеристик объекта управления Геометрические данные месторождения приведены в таблице 4.1. (значения параметров заданы в системе СИ). Таблица 4.1 Геометрические данные
Физические параметры, используемые при моделировании объекта управления были заданы в виде: водоотдача
коэффициенты фильтрации по соответствующим координатам: k1,x= 0,192 м /сут.,, k1,y= 0,192 м /сут.,, k1,z= 0,0195 м /сут., k2,x= 0,19 м /сут.,, k2,y= 0,19 м /сут.,, k2,z= 0,019 м /сут., k3,x= 0,14 м /сут.,, k3,y= 0,19 м /сут.,, k3,z= 0,019 м /сут., k4,x= 0,14 м /сут.,, k4,y= 0,19 м /сут.,, k4,z= 0,019 м /сут., параметр перетекания b1 = 0,00003 сут.-1, b2 = 0,000033 сут.-1, b3 = 0,000035 сут-1., начальное состояние i-го невозмущенного пласта h1,0,ξ= (ξ-1)∙ Н2,0=220м., Н3,0=270м., Н4,0=350м., шаги дискретизации по соответствующим координатам:
где: Nx, Ny, Nzi, - число точек дискретизации по соответствующим координатам ( в рассматриваемом примере были выбраны следующие значения Nx=8, Ny=24, Nzi=8, (i=1..4) ). Была составлена вычислительная программа для анализа динамических характеристик объекта управления. Входным воздействием на объект управления служит функция Uj(τ) , которая связана с функцией V(yj,τ) следующим соотношением V(yj,τ) =0.001∙Uj, где V(yj,τ) –понижение напора, вызванное воздействием j-ой добывающей скважиной (в рассматриваемом случае j=1..4). Методика проведения экспериментальных исследований (определения реакции системы на заданную пространственную моду входного воздействия ) описана в [ 1,2] и заключается в следующем. В установившемся режиме, скачком подаем входное воздействие на объект управления в виде выбранной пространственной моды Uj= Ai ∙sin(ψi∙yj), ψi=π∙i/(8-1), где y=(j-1)∙Δy, i - номер моды, j- точки расположения добывающих скважин, Δy- шаг дискретизации по оси y.
Рис.4.2. Исследования динамики объекта управления
При проведении натурного или численного эксперимента, амплитуда пространственной моды (Ai) выбирается не более 10% от установившегося значения напора в изучаемом водоносном горизонте. В рассматриваемом случае, полагая, что в точках 1 и 8 поддерживается значение понижения напора, равное установившемуся значению (воздействие от добывающих скважин, при скачкообразном понижении напора равно нулю). Если объект принадлежит к классу пространственно-инвариантных [1,2], то для оценки динамики объекта достаточно информации, получаемой с помощью любой выбранной контрольной скважины. Нет необходимости восстанавливать всю пространственную моду на выходе объекта управления (использовать результаты измерений всех контрольных скважин). Схема проведения экспериментальных исследований (на численной модели или на реальном объекте управления) приведена на рис. 4.2 . В результате численного эксперимента получено, что объект принадлежит к классу пространственно-инвариантных .
Рис. 4.3. Первая мода
Рис.4.4. Третья мода
Реакция объекта на первую пространственную моду входного воздействия, полученная в точке расположения 4-й контрольной скважины, представлена на рис.4.3 , а на 3-ю моду входного воздействия на рис. 4.4. Аппроксимируем передаточную функцию по выбранным пространственным модам передаточной функцией вида
В результате численного моделирования получены следующие значения параметров передаточной функции, при условии, что входное воздействие Uj (j-ой добывающей скважины) связано с функцией понижения напора следующим соотношением V(yj,τ) =0.001∙Uj, (в рассматриваемом случае j=1..4): η=1,G1= 8.057∙ 10-5, К(G1)= 32/(1∙(sin(π∙2/7))=40.93, T(G1)= 3.9∙24-3.15=90.55 час.,τз(G1)= 3.15час.; η=3 , G3= 7.25∙ 10-4 , К(G3)= 3.6/(1∙(sin(π∙3∙2/7))=8.3 , T(G3)=1.6∙24-2.9=35.5 час., τз(G3)= 2.9∙час.
4.3.2. Методика синтеза распределенного регулятора Методика синтеза распадается на следующие этапы [14]: 1. Используя передаточную функцию (4.1) и вычисленные значения параметров по первой пространственной моде, синтезируем регулятор, реализующий пропорционально – интегрально -дифференциального закона управления (ПИД). В процессе синтеза ПИД по первой пространственной моде (η=1,К(G1)=40.93, T(G1)=90.55 час., τз(G1)= 3.15час.), с использованием программного комплекса МИРЭА, получены значения параметров регулятора ПИД
где: К=0.7686;Ti=120.0626час. ;Td=0,0709час.; Δφ=π/6; Δ =5 [1,2]. С использованием дискретной модели объекта управления, была составлена программа, позволяющая моделировать работу замкнутой системы управления. Структурная схема системы управления приведена на рис. 4.5. Входным воздействием на систему управления служит желаемый напор Н*– напор в водоносном горизонте, в точках установки контрольных скважин. Число таких скважин четыре (см. рис. 4.5). Н4- текущее значение напора в точках установки контрольных скважин. Управляющим воздействием U служит изменение напора в точках установки добывающих скважин.
Рис. 4.5. Схема системы управления
Рис.4.6. Графики переходного процесса
В результате моделирования работы замкнутой системы управления получены графики изменения функции рассогласования и управляющего воздействия (изменение напора в добывающей скважине). На рис. 4.6. рассогласование приведено для точки Н5,4,4,4, а изменение напора для добывающей скважины (точки Н4.4.4.4). 2.Оптимизируем выбор значений параметров β и r. Выберем параметры β и r, обеспечивающие минимальный статический коэффициент усиления разомкнутой системы (см. рис.4.7).
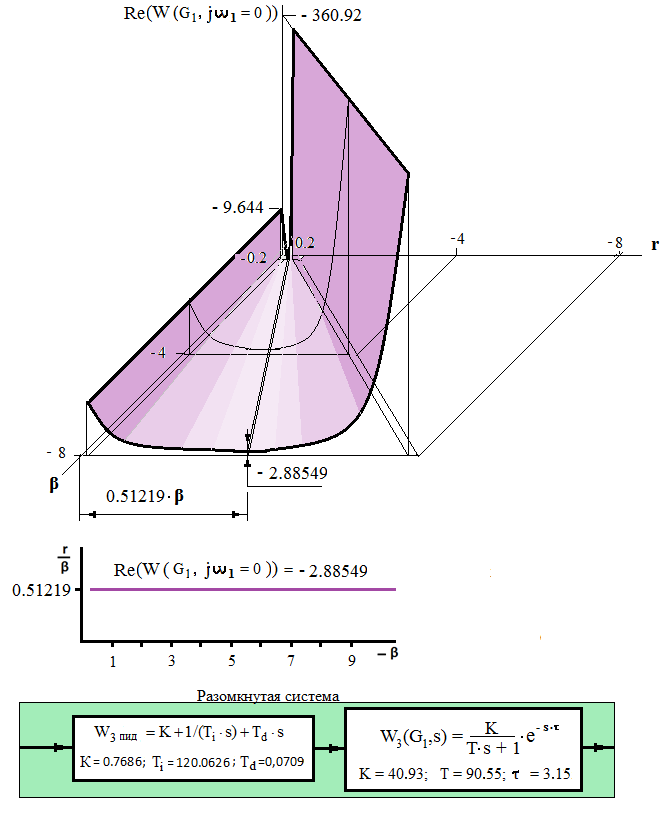
Рис. 4.7. Оптимизация параметров β и r по первой пространственной моде разомкнутой системы
Используя модифицированную передаточную функцию разомкнутой системы и изменяя значения параметров β и r (abs(β)>abs(r)) , определим соотношение параметров r/β, обеспечивающее минимальный модифицированный статический коэффициент усиления разомкнутой системы Re(W(G1,jω1=0)) (см. рис.4.7). Результаты вычислений показывают, что минимальный статический коэффициент зависит не только от соотношения параметров r/β, но и от параметров объекта управления. Оптимальные значения параметров β и r соответственно равны: β = - 0.6; r=0.51219∙(-0.6)= - 0.307314. Полагая в передаточной функции разомкнутой системы s=jω (см. рис.4.7) и преобразуя, полученное соотношение с учетом
β= - 0.6 и r = - 0.307314, построим модифицированные годографы разомкнутой системы управления, состоящей из регулятора, ПИД и объекта управления, по выбранным пространственным модам (см. рис. 4.8).
Рис. 4.8. Модифицированный годограф разомкнутой системы
3. Синтезируем распределенный регулятор, реализующий статический закон управления. Передаточная функция такого регулятора имеет вид W= E1((n1-1)/n1+ G/n1) [1,2]. 3.1. Для выбранных пространственных мод (G1 и G3, см. рис. 4.8) определим желаемые коэффициенты усиления регулятора
3.2. Для определения параметров распределенного регулятора запишем следующие уравнения
Поделив (4.3) на (4.2), придем к следующему результату:
где Подставляя вычисленные значения, получим
где Подставляя вычисленное значение
Полученная передаточная функция регулятора может быть записана в виде
где: Е1= 4301.3528; n1=1; К=0.7686; Ti=120.0626 час. ;Td=0.0709 час.
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 368. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

 Грунтовые воды
Грунтовые воды
 Верхний пласт
Верхний пласт



 Нижний пласт
Нижний пласт ,
, - коэффициенты фильтрации по пространственным координатам в горизонте грунтовых вод (i=1) и i-го пласта(i=2..4);
- коэффициенты фильтрации по пространственным координатам в горизонте грунтовых вод (i=1) и i-го пласта(i=2..4); – упругоемкость i-го пласта(i=2..4);
– упругоемкость i-го пласта(i=2..4); ,
, .
. ,
, .
. ,
, ,
, .
. ,
, .
.
 ,(i=2..4),
,(i=2..4),





 ,
, Nx, Ny –число точек дискретизации по координатам x и y соответственно;
Nx, Ny –число точек дискретизации по координатам x и y соответственно; ,
, .
. ,
, .
. ,
, .
. ,
,
 ,
, , (i=2..4) ,
, (i=2..4) , ,
, ,
, ,
, , (i=2..4),
, (i=2..4), 2= 0.00101/м.,
2= 0.00101/м., z1 м.,
z1 м., х = Lx/(Nx-1) м.,
х = Lx/(Nx-1) м., у = Ly/(Ny-1) м.,
у = Ly/(Ny-1) м.,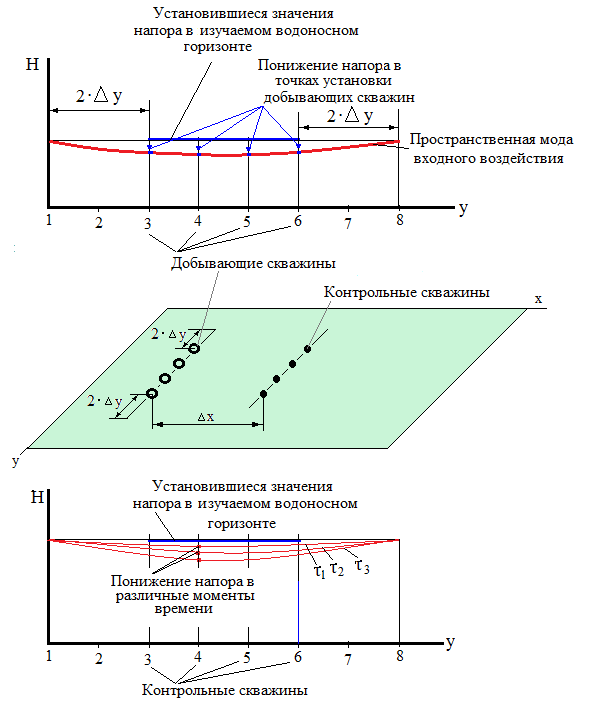


 , (4.1)
, (4.1) ,
,

 ,
,

 ,
,  .
. , (4.2)
, (4.2) . (4.3)
. (4.3) , (4.4)
, (4.4) .
. ,
,  .
. в (4.2) и преобразуя, получим
в (4.2) и преобразуя, получим .
.