|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
ГЛАВА 3. СРАВНЕНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ ЗАМКНУТЫХ РАСПРЕДЕЛЕННЫХ СИСТЕМСравним переходные процессы систем управления, синтезированных с использованием методики синтеза распределенных регуляторов, с использованием качественной теории и частотной методики синтеза РВР [1,2].
Синтез распределенного высокоточного регулятора (РВР) Синтезируем распределенную систему управления рассмотренным выше объектом. Передаточная функция РВР имеет вид [1,4]
где: Еi , ni – параметры, определяемые в процессе синтеза (i=1,2,4);
Постановка задачи: для системы управления объектов, передаточные функции которого заданы в виде
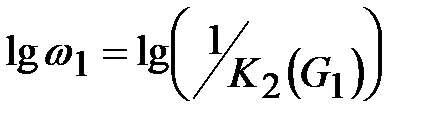
G1= 66.87, К(G1)= 0.282245, T(G1)= 2058.188584 , τз(G1)= 449.390945 ; G3= 602.06 , К(G3)= 0.043225, T(G3)= 1120.090859 , τз(G3)= 314.638407 , синтезировать распределенный высокоточный регулятор со следующими показателями: запас устойчивости по фазе - Методика синтеза РВР распадается на следующие этапы [1,2]: 1. Для двух выбранных пространственных мод (G1 и G3) определим желаемые точки среза модуля разомкнутой системы. При этом положим, что фазовый сдвиг, вносимый в систему регулятором равен нулю.
где W(G,jω) – комплексный передаточный коэффициент объекта управления. Используя уравнение (3.1), для выбранных пространственных мод (G1 и G3), определим значения ω1 ω3 :ω1=0.001004; ω3=0.001611. 2. Определение параметров пространственно-усилительного звена Подставляя
определим значения модуля объекта управления для выбранных пространственных мод. Так как 
Определение параметров
Поделив (1.7) на (1.6), придем к следующему результату:
где (при этом значения Подставляя вычисленное значение
3. Определение параметров пространственно - интегрирующего и пространственно - дифференцирующего звеньев. Определение параметров регулятора будем осуществлять, исходя из условия, что значение частот Для частот, принадлежащих линии перегиба, фазовый сдвиг, вносимый в разомкнутую систему регулятором, равен нулю. Подставляя
Вычитая из (3.8) (3.7), придем к следующему результату:
где Используя (3.9), определим значения 3.1. Поскольку Тогда
при этом на изменение значения Взаимосвязь параметров рассматриваемых звеньев с параметром Δ [1,2] описывается соотношением
где Преобразуя, придем к следующему результату
Подставляя (3.11) в (3.7) и преобразуя, придем к следующему результату
Вычисленные параметры РВР соответственно равны:
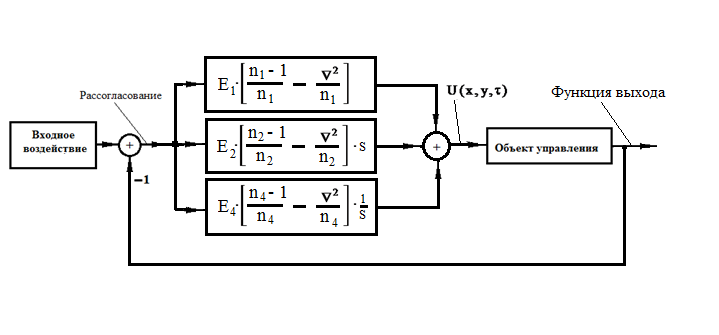
E1=3.2627; n1=441; E2=704.059061; Структурная схема системы управления приведена на рис. 3.1. По результатам моделирования замкнутой системы управления построен график функции рассогласования
для заданной точки z=Z*, x=0.2 , y=0.3 (см. рис. 3.2). Аналогичные графики могут быть построены и для других точек.
Рис. 3.1. Структурная схема системы управления
Рис.3.2. График переходного процесса
|
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 367. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 ,
, - лапласиан; s -оператор Лапласа.
- лапласиан; s -оператор Лапласа.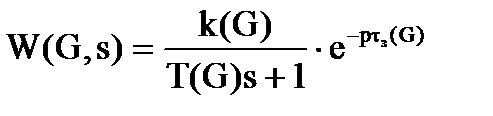 ,
,  ; запас устойчивости по модулю ΔL ≥ 6 дб., значение параметра
; запас устойчивости по модулю ΔL ≥ 6 дб., значение параметра  =2 (см.[1])
=2 (см.[1]) (3.1)
(3.1) ,
,  в соотношение
в соотношение
 являются частотами среза модуля разомкнутой системы, то коэффициенты усиления регулятора в этих точках равны:
являются частотами среза модуля разомкнутой системы, то коэффициенты усиления регулятора в этих точках равны: ,
,  . (3.2)
. (3.2) и
и  будем осуществлять, исходя из условия
будем осуществлять, исходя из условия  ,
,  - (см. [ 1,2]).
- (см. [ 1,2]).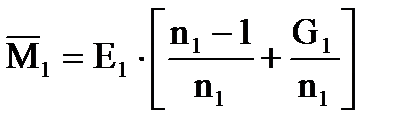 , (3.3)
, (3.3) . (3.4)
. (3.4) , (3.5)
, (3.5) .
. ).
). . (3.6)
. (3.6) в уравнение линии перегиба , получим следующую систему уравнений:
в уравнение линии перегиба , получим следующую систему уравнений: , (3.7)
, (3.7) . (3.8)
. (3.8) (3.9)
(3.9) .
. и
и  .
. , то положим
, то положим  .
. , (3.10)
, (3.10) .
. ,
,  ,
, ,
, 
 . (3.11)
. (3.11) .
. ; E4=0.00573;n4=274.3259 .
; E4=0.00573;n4=274.3259 . ,
,