|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Техническая характеристика машины ЛП-18ДБаза машины ..................................Трактор ТТ-4 Мощность двигателя, кВт ..........................80,9 Управление: базовой машиной...............................механическое навесным оборудованием........................ . гидравлическое Производительность при расстоянии трелевки до 300 м при среднем объеме деревьев (хлыстов) 0,6 . . . 0,8 м3, м3/ч .... 18,8 Грузоподъемность манипулятора вылета, т: максимальном ................................5,0 минимальном .................................2,0 Диаметр дерева в месте захвата, см: Минимальный………………..7 Максимальный……………….100 Вылет захватного устройства, м: максимальный ................................5 минимальный .................................2 Угол поворота манипулятора в горизонтальной плоскости, град ................................210 Наибольшая масса трелюемой пачки комлями вперед, т.....................................6,8 Масса машины конструктивная, кг ....................17300 Габаритные размеры, мм: длина ......................................7600 ширина.....................................2800 высота .....................................3800 Управление движением машины осуществляется оператором из кабины, в которой установлено поворотное сиденье и расположены все рукоятки и педали управления трактором и навесным оборудованием. В положении лицом по ходу машины оператор работает рычагами и педалями управления трактора ТТ-4. Дополнительно справа от сиденья установлена ручка распределителя Рн203, при помощи которой осуществляется управление гидроцилиндрами толкателя, и рычаги включения насосов гидросистемы. Повернувшись на 180° в сторону заднего моста трактора, оператор работает рычагами управления навесного оборудования машины, которые установлены на задней стенке кабины. К ним относятся шесть рукояток от шести секций распределителей. Кроме того, здесь же расположена дублированная педаль управления топливным насосом двигателя трактора.  Машина работает следующим образом. Двигаясь вдоль трелевочного волока, машина останавливается возле поваленных деревьев, расположенных в зоне вылета манипулятора. Направление движения выбирается так, чтобы поваленные деревья располагались с левой стороны по ходу машины. Во время остановки оператор должен надежно затормозить машину, раскрыть коник, навести захват на ближнее поваленное дерево, зажать его в комлевой части и уложить в коник, а захват с помощью манипулятора навести на следующее/дерево. Таким образом, формируется пачка объемом до 8,3 м3, после чего машина трелюет пачку на лесопогрузочный пункт. При трелевке пачки деревьев манипулятор располагается вдоль оси машины против хода. Коник машины удерживает пачку деревьев во время трелевки и обеспечивает разгрузку на лесопогрузочном пункте. При помощи толкателя производят выравнивание и уплотнение штабеля, выравнивание трелевочных волоков и погрузочных площадок. Отличительной особенностью машины является то, что на ней установлен рычажный коник аналогичный конику валочно-трелевочной машины ЛП-49. Рычажный механизм поворота колонны с углом поворота 210°, щит для защиты коробки перемены передач от комлей, раздаточная коробка для двух насосов и толкатель. Механизм поворота колонны предназначен для передачи крутящего момента на колонну и представляет собой систему рычагов последовательно соединенных между собой осями. Коник предназначен для формирования пачки деревьев, удержания ее в процессе движения и разгрузки на лесопогрузочном пункте. На машине применен коник рычажного типа с тросовой обвязкой деревьев. Поворотная рама коника дает возможность наклонять коник в сторону заднего моста трактора при наборе пачки и в сторону кабины при разгрузке его. Наклон осуществляется гидроцилиндром. Гидроцилиндр зажима управляет двумя поворотными рычагами, которые осуществляют зажим и удержание пачки деревьев на конике во время движения. Конструкция захвата Захват (рисунок 2.2) предназначен для зажима комлей или вершин поваленных деревьев (хлыстов) при погрузке их в коник. Он состоит из корпуса 1 сварной коробчатой конструкции. Для подвески захвата к рукояти служит хвостовик 2 с одной стороны которого имеется отверстие для пальца крепления, с другой стороны упорный фланец. Захват может поворачиваться вокруг хвостовика. Челюсти захвата (поз.3,4 выполнены в виде закрытой коробчатой конструкции высокой жесткости. Для синхронизации момента смыкания и размыкания челюстей служит синхронизирующая тяга 5. Гидроцилиндр 6 предназначен для привода челюстей является типовым унифицированным гидроцилиндром. При подаче жидкости в поршневую полость гидроцилиндра челюсти закрываются. При подаче жидкости в штоковую полость челюсти открываются.
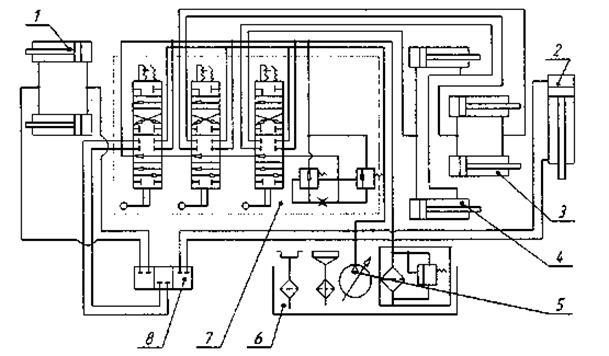
Рисунок 2.2 – Захват клещевой 1-корпус, 2-хвостовик, 3,4-челюсти, 5-тяга, 6-гидроцилиндр Работа гидросистемы Гидравлическая система предназначена для привода и управления навесным оборудованием машины. В гидравлическую систему (рисунок 2.3) входят два насоса HI и Н2, НШ-50Л и НШ-100Л. Гидрораспределители (Р1) Р203, (Р2) Р80и (РЗ) Р160, десять гидроцилиндров, три предохранительных клапана (К/7/ … КПЗ) 521.20.06, два предохранительных блока клапанов (БК1 …. БК2), гидрозамок ЗМ, бак масляный Б, присоединительная арматура (рукава высокого давления, штуцера и т.п.). Привод насоса НШ-50Л (Н1) осуществляется от двигателя базового трактора. Рабочая жидкость из масляного бака. Б по трубопроводу поступает в насос и далее в напорную магистраль к распределителям Р1 и Р2. Через распределитель Р1 рабочая жидкость подводится к гидроцилиндрам толкателя, а через распределитель Р2 к цилиндрам наклона коника ЦЗ, захвата Ц2, механизма поворота колонны Ц5, ЦБ. Вытесняемая жидкость из гидроцилиндров через распределители Р1 и Р2 по сливной магистрали через фильтр уходит на слив в бак Б. Привод насоса НШ-100 осуществляется от раздаточной коробки машины. Рабочая жидкость из масляного бака Б по трубопроводу поступает в насос и далее в напорную магистраль распределителя РЗ. Через гидрораспределитель рабочая жидкость подводится к гидроцилиндрам стрелы Ц7, Ц8, рукоятки Ц4 и зажима коника Ц1. Вытесняемая из гидроцилиндров жидкость через распределитель (РЗ) по сливной магистрали через фильтр уходит на слив в бак.
Рисунок 2.3 – Принципиальная гидравлическая схема Работоспособность и надежность насосов НШ-50Л и НШ-100Л зависит от соблюдения рекомендаций по качеству и типу рабочей жидкости, по обеспечению чистоты и рекомендуемого диапазона вязкости. В гидросистеме применяются распределители: однозолотниковый трехпозиционный Рн203-ФВ64 (Р1) Ульяновского завода гидроаппаратуры; моноблочный трехсекционный четырехпозиционный Р80-3/1-333 (Р2) ; моноблочный трехсекционный четырехпозиционный Р160-3/1-333 (РЗ) Мелитопольского завода гидроагрегатов. Гидроцилиндры толкателя Ц(9), стрелы (Ц7, Ц8), рукояти (Ц4) и механизма поворота колонны (Ц5, Ц6) унифицированные, по конструкции однотипны выпускаются по ОСТ 22-1417 - 79. Для нормальной работы гидроцилиндров необходимо выполнить следующие условия: а) штоки не должны иметь царапин и забоин; б) своевременно заменять изношенные манжеты; в) при минусовых температурах не допускать образования ледяной корки на штоках.
Контрольные вопросы 1 Назначение трелевочной машины ЛП-18Д. 2 Основные технические особенности машины. 3 Из каких основных узлов состоит ЛП-18Д и назовите назначение каждого узла? 4 Опишите работу гидравлической системы ЛП-18Д.
Пачкоподборщики Цель: изучение конструкции и приемов работ трелевочных машин с пачковым захватом. Задание: 1 Изучить и законспектировать назначение и состав пачкоподборщиков. 2 Изучить общее устройство машины и схематически зарисовать ее общий вид. 3 Изучить приемы работы машины. 4 Изучить и зарисовать устройства машины. 5 Изучить гидравлическую систему машины. При выполнении работы студент под руководством преподавателя изучает по натурному образцу, схемам и методическим указаниям конструкцию оборудования, составляет письменный отчёт. Содержание отчета: 1 Назначение пачкоподборщиков. 2 Техническая характеристики машин. 3 Общий вид одной из машин. 4 Приемы работы машины. 5 Кинематическая схема указанного узла. 6 Пневматическая система. 7 Гидравлическая система. При защите лабораторной работы студент должен предъявить письменный отчёт и ответить на контрольные вопросы преподавателя. Для выполнения работы необходимо следующее оборудование и инструменты: 1. Изучаемая машина (или комплект специализированных плакатов). 2. Данное методическое указание. 3. Комплект канцелярских принадлежностей (бумага, ручка, карандаш, линейка).
Машины для бесчокерной трелевки леса можно разделять на два основных типа: машины для поточного набора деревьев с гидроманипуляторами и кониками; машины с пачковыми захватами. Первые более универсальны, так как позволяют набирать воз как из отдельно лежащих деревьев, так я из пачек, Машины с пачковыми захватами узко специализированы на трелевке готовых пачек, при этом они более производительны. Практика показала, что трелевочные тракторы с пачковым захватом, способные за один прием захватить всю пачку деревьев, являются наиболее эффективным средством для трелевки пачек, сформированных валочно-пакетирующими машинами. Трелевочные машины с пачковыми захватами предназначены для работы на лесосеке после валочно-пакетирующих машин. Основной особенностью трелевочного оборудования такого типа является совмещение в захвате грузозахватных и грузонесущих функций. В этом его главное отличив от трелевочного оборудования с гидроманипулятором и коником. Трелевочное оборудование с пачковым захватом состоит из двух основных узлов: стрелы с гидроприводом и пачкового захвата. В большинстве случаев трелевочное оборудование включает также лебедку, которая предназначена для предотвращения раскачивания пачкового захвата при движении трактора без груза, для увязки пачки в захвате и вытаскивания трактора при невозможности движения посредством ходовой части в условиях пересеченной местности. Тракторы, как правило, оснащены бульдозерным отвалом, который при необходимости используется для выравнивания комлей или окучивания пачки деревьев. На отечественных колесных трелевочных тракторах, с пачковыми захватами для этих целей установлены на задней полураме гидравлически управляемые щиты. Отечественная промышленность выпускает пачкоподборщики на колесном и гусеничном шасси. В качестве гусеничного шасси применяются доработанные специализированные трелевочные тракторы Алтайского и Онежского заводов. ТТ-4М и ТЛТ-100. Колесные шасси представлены модернизированными тракторами сельскохозяйственного назначения Т-157 и К-703.
Пачкоподборщик ЛТ-187 Технологическое оборудование трактора состоит из стрелы 2, челюстного захвата 3, лебедки 1 и гидросистемы. Стрела выполнена в виде арки и имеет вылет, изменяющийся путем её наклона. Стрела предназначена для подъема и опускания челюстного захвата с пачкой и удержания её в заданном положении. Техническая характеристика
Рисунок 3.1 – Подборщик пачек ЛТ-187 1-трактор ТТ-4М; 2-стрела; 3-челюстной захват; 4-канат; 5- гидроцилиндр Челюстной захват (рисунок 3.2) служит для захвата комлевой части пачки, подъема и удержания её в полуподвешенном положении во время трелевки.
Рисунок 3.2 – Захват челюстной Он состоит из траверсы 1, двух челюстей 5, шарнирно соединенных с траверсой, синхронизатора 2, обеспечивающего синхронное раскрытие и закрытие челюстей. Клещевой захват открывается и закрывается с помощью гидроцилиндра 3, расположенного внутри траверсы. Для надежного удержания пачки захват снабжен канатным увязочным устройством 4. Надежность обеспечивается затяжкой каната при помощи лебедки. Порожний ход ЛТ-187 должен выполняться, как правило, передним ходом при обычной нормальной позе тракториста. Движение задним ходом с поворотом тракториста на 1800 допускается на расстояния не более 50-70 м. Управление трактором в этой позе при порожних переездах на большие расстояния недопустимо по физиологическим и эргономическим условиям. Заключительным приемом порожнего хода является маневрирование трактора у места погрузки или формирования пачки. В непосредственной близости от хлыстов (деревьев), которые необходимо трелевать, тракторист выбирает свободную от хлыстов и пней площадку и разворачивает трактор. Затем трактор задним ходом подается к деревьям, хлыстам или пачкам, подлежащим трелевке. При подъезде трактора ЛТ-187 к пачке на расстояние 5 м его технологическое оборудование переводится из транспортного положения в рабочее. Для этого растормаживается барабан лебедки и захват, подтянутый к стреле тросом для порожнего переезда, освобождается, стрелка наклоняется назад, захват раскрывается на ширину, необходимую для забора пачки. Все эти приемы могут выполняться как последовательно, так и одновременно. Единственным обязательным условием является растормаживание барабана лебедки и ослабление троса перед включением цилиндра захвата и стрелы. При закрытии захвата тросовая петля остается в свободном положении над пачкой. Включением лебедки петля затягивается, зажимая пачку сверху. Для погрузки пачки применяется прием подъезда трактора под пачку, который выполняется следующим образом: пачка стрелой поднимается вверх, одновременно трактор подается назад, под пачку. Пачки, примерзшие к земле или занесенные снегом, до того как брать их в захват, следует сдвинуть с места толкателем. Для сдвига пачки трактор подходит к ней сбоку, на расстоянии 5-7 м от комлевого торца. Деревья в крупных или сильно примерзших пачках сдвигаются поочередно. При правильном положении пачки и элементов технологического оборудования, полностью подготовленного для грузового хода, стрела должна быть уложена на упоры на корпусе лебедки, пачка зажата в захвате и затянута канатом, комлевая часть пачки для сохранения маневренности трактора должна находиться навесу и не касаться стрелы.
Пачкоподборщик ЛТ-157 Трелевочная машина ЛТ-157 предназначена для подбора и трелевки пачек деревьев и хлыстов без применения ручного труда, а также для чокерной трелевки и вспомогательных работ (расчистки волоков, выравнивания торцов пачек и др.). Кроме того, машину используют на транспортных операциях по магистральным дорогам и бездорожью с прицепами грузоподъемностью до 20 т. Технические данные Номинальное тяговое усилие, кН………………….30 Колесная формула…………………………………….. 4x4 Эксплуатационная мощность двигателя, кВт………..110 Частота вращения вала двигателя, об/с……………….33 Габаритные размеры, мм: длина …………………………………………………6700 ширина ………………………………………………..2540 высота …………………………………………………3110 Дорожный просвет, мм ………………………………515 Масса машины конструктивная, кг…………………11350 Нагрузка на передний мост, кН …………………….. 62 Нагрузка на задний мост, кН …………………………52 Давление в гидросистеме, МПа ………………………14 Максимальная масса трелюемой пачки, кг: чокерное исполнение……………………………….8000 с клещевым захватом……………………………….4500 Общее устройство машины Трелевочная машина ЛТ-157 (рисунок 3.3) состоит из шасси (базового трактора Т-157) и установленного на нем технологического оборудования. Технологическое оборудование, установленное на машине ЛТ-157, включает: ограждения радиаторов, капота и кабины, нижнее ограждение, толкатель, лебедку, редуктор привода лебедки, блок электропневмоклапанов (3 шт.), щит, арку, захват, электро- и гидрооборудование. При работе трелевочной машины ЛТ-157 в чокерном варианте захват снимается. Лебедка служит для сбора и формирования пачек деревьев или хлыстов, подтаскивания их к машине и удержания пачек в полуподвешенном положении с помощью каната на горизонтальном ролике арки. На трелевочной машине ЛТ-157 установлена однобарабанная лебедка с двухступенчатым редуктором, реверсивная, с карданным приводом через редуктор привода лебедки от вала отбора мощности (ВОМ).
Рисунок 3.3 – Общий вид машины ЛТ-157 1- толкатель; 2- трактор Т-157; 3 - ограждение; 4 - карданный вал редуктора ВОМ; 5 - лебедка; 6 - блок электропневмоклапанов; 7 - тормоз лебедки; 8- редуктор ВОМ; 9 - редуктор привода лебедки; 10 - арка; 11 - канат; 12 - захват; 13 - щит; 14 – гидроцилиндр арки; 15-гидроцилиндр толкателя
Кинематическая схема привода лебедки представлена на рисунке 3.4. Управление лебедкой осуществляется с помощью редуктора ВОМ. Гидравлическая муфта 12 предназначена для включения и выключения лебедки. Вращение барабана лебедки изменяют с помощью редуктора 2 привода лебедки перемещением шестерни 4 обратного хода.
Рисунок 3.4 - Кинематическая схема привода лебедки 1 - предохранительный штифт; 2 - редуктор привода лебедки; 3 -промежуточная шестерня; 4 - шестерня включения обратного хода; 5 -муфта свободного хода; 6 - редуктор привода лебедки; 7 - пневматическая камера; 8 - кулачковая муфта отключения барабана; 9 - кулачковая муфта включения редуктора ВОМ: 10 - редуктор ВОМ; 11 - тормозок ВОМ; 12 -гидравлическая муфта включения редуктора ВОМ; 13 - соединительная муфта
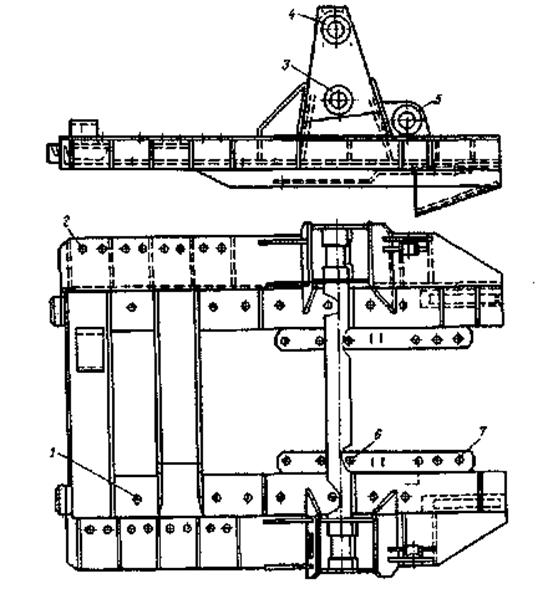
При перегрузке лебедки усилием, превышающим 72,5 кН, срезается предохранительный штифт 1. Муфта свободного хода 5 с тормозом не позволяет пачке деревьев (хлыстов) самопроизвольно опускаться на почву. Для сбрасывания пачки выключают тормоз. Сбрасыванию легкой пачки препятствует тормозок ВОМ 11. В этом случае арку опускают, машину сдают назад для ослабления каната и выключают кулачковую муфту 8 отключения барабана. Лебедку, редуктор привода лебедки, редуктор ВОМ и арку устанавливают на опоре технологического оборудования (рисунок 3.5), которую располагают на задней полураме машины.
Рисунок 3.5 - Установочная опора 1 - отверстия крепления установочной опоры к задней полураме трактора; 2- отверстия крепления лебедки; 3 - место крепления гидроцилиндров щита; 4 - труба крепления гидроцилиндров арки; 5 - опора арки; 6 - отверстия крепления редуктора ВОМ; 7-отверстия крепления редуктора привода лебедки. Пневматическая система Пневматическая система технологического оборудования (рисунок 3.6) машины ЛТ-157 управляется электропневмоклапанами и предназначена для включения и выключения барабана и тормоза лебедки и изменения направления вращения (реверсирование) барабана лебедки.
Рисунок 3.6 - Пневматическая система 1 - камера тормоза передних колес; 2 - воздушный манометр; 3 - стеклоочиститель; 4 - воздушный кран; 5 - тормозной кран; 6 - компрессор; 7 - регулятор давления; 8 - предохранительный клапан; 9 - воздушный баллон; 10 - спускной кран; 11 - заглушка; 12 - кран отбора воздуха; 13 - электропневмоклапан для управления муфтой лебедки; 14-электропневмоклапан для управления тормозом лебедки; 15 - электропневмоклапан для управления редуктором привода лебедки; 16-воздухораспределитель; 17 - камера редуктора привода лебедки; 18 - камера тормоза лебедки; 19 - камера муфты лебедки; 20 - камера тормоза задних колес; 21 - соединительная головка; 22 - разобщительный кран; 23 - дополнительный штуцер на задней полураме; 24 - следящее устройство пневмосервирования; 25 - камера муфты сцепления; 26 - рычаг тормоза прицепа; 27 - трубопроводы с арматурой; 28 - педаль тормоза Гидравлическая система Гидравлическая система машины ЛТ-157 предназначена для управления рабочими органами технологического оборудования. Она включает гидравлическую систему базового трактора Т-157 и оборудование: гидроцилиндры, кран управления, трубопроводы и арматуру. Трехпозиционный распределитель 7 (рисунок 3.7) управляет четырьмя рабочими органами с гидравлическим приводом: толкателем, щитом, аркой и захватом. Толкателем и захватом одновременно управлять нельзя, поэтому, переключая кран управления 8 в одно из двух крайних положений, управляют каким-либо одним органом. Кран управления расположен на раме технологического оборудования перед лебедкой. На захвате установлен гидроцилиндр с диаметром поршня 160 мм, ходом 620 мм, усилием 200 кН. Остальные гидроцилиндры марки Ц110-1414001Г имеют диаметр поршня 110 мм, ход 250 мм, усилие 95 кН, они взаимозаменяемы с гидроцилиндрами сельскохозяйственных машин ЦС-110. Гидроприводы и шланги имеют внутренние отверстия диаметром 16 мм. Гидронасос и привод ВОМ разрешается включать только при неработающем двигателе.
Рисунок 3.7 - Гидравлическая система трактора ЛТ-157 1-гидроцилиндры толкателя; 2-гидроцилиндр захвата; 3-гидроцилиндры арки; 4 - гидроцилиндры щита; 5- насос; 6- бак; 7 -распределитель; 8 - кран управления
Арка с роликами предназначена для подтаскивания и удержания пачки деревьев или хлыстов в полуподвешенном положении, а также для опускания захвата на пачку деревьев и подъема пачки при бесчокерной трелевке леса. Арка представляет собой сварную конструкцию, к верхней плоскости которой болтами крепится кронштейн для подвески захвата. Подвижная арка приводится в движение двумя гидроцилиндрами. Установленные на арке ролики служат для направления каната лебедки. Арка смонтирована на установочной опоре через проушины с помощью пальцев. Толкатель, установленный в передней части машины, поднимается или опускается двумя гидроцилиндрамни и служит для подготовки трелевочных волоков, выравнивания торцов деревьев, штабелевки леса, очистки погрузочных площадок и других вспомогательных работ. Ограждения, установленные на тракторе ЛТ-157, служат для защиты радиатора, кабины и двигателя от падающих сучьев и подроста. Для защиты узлов трактора от повреждений пнями, валежником и сучьями в нижней части передней полурамы крепится ограждение двигателя, переднего моста и коробки передач. Все три секции нижнего ограждения имеют шарнирное соединение и при снятии крепежных болтов откидываются на этих шарнирах, освобождая доступ к деталям трактора. Для защиты оборудования от пачки деревьев, для упора и повышения устойчивости трактора при подтягивании пачки канатом лебедки сзади трактора устанавливается подвижный щит, который также может использоваться при выравнивании торцов и окучивании деревьев. Захват (рисунок 3.8) служит для подбора и удержания пачки деревьев или хлыстов. Захват состоит из корпуса 1, подвешенного к кронштейну арки на двух цепях длиной около 600 мм, двух клыков 4, гидроцилиндра 3 и следящей тяги 2. На корпусе и клыках установлены ролики для каната 6 лебедки. Следящая тяга 2 служит для синхронного закрывания и открывания клыков 4. После закрывания клыков с помощью лебедки затягивают канат 6, который помогает клыкам удерживать пачку деревьев (хлыстов) от выскальзывания, при этом она дополнительно прижимается к нижней части клыков. При подтягивании каната пачка деревьев с захватом повисает не на кронштейне арки, а на канате лебедки, проходящем через ролик арки. Поэтому понижается точка подвеса пачки, а следовательно, улучшаются развесовка, устойчивость и проходимость машины.
Рисунок 3.8 – Захват 1- корпус, 2- следящая тяга; 3- гидроцилиндр; 4- клык; 5- ролик; 6- канат; 7- кронштейн с роликами; 8- палец; 9 - клин
Технологический цикл машины заключается в следующем. Холостой ход, подъезд задним ходом к пачке деревьев, выравнивание комлей деревьев, наводка захвата на пачку, зажим и подъем пачки, трелевка пачки к месту назначения, разгрузка пачки. Пачкоподборщик МЛ-30 Трелевочная машина МЛ-30 на базе трактора К-703М, оснащенная трелевочным оборудованием с пачковым захватом, предназначена для подбора и трелевки подготовленных пачек деревьев или хлыстов, в том числе для подбора отдельно поваленных деревьев (при различных способах рубок), выравнивания комлей и штабелевки. Машина может использоваться на всей территории Российской Федерации в условиях равнинной и слабо пересеченной местности круглогодично на грунтах 1 и 2 категории и снеге глубиной до одного метра в районах с умеренным климатом по ГОСТ 15150-69 и ГОСТ 16350-80. При эксплуатации обслуживается одним машинистом.
Технические данные МЛ-30
Общее устройство Машина МЛ-30 (рисунок 3.9) состоит из базового трактора К-703М с доработкой, трелевочного оборудования, состоящего из арки 1, стрелы с полиспастом 2, механизма поворота 3, пачкового захвата 4, гидроцилиндров 8, 11, привода стрелы и арки. Трелевочное оборудование через надрамник 13 присоединяется к задней полураме базового трактора. Машина также состоит из гидравлической системы привода рабочих органов 5, толкателя 6, с гидроцилиндрами 10, нижнего ограждения 12, ограждения радиатора 17, отбойных канатов 18, электрооборудования 7, ограждения колес 14. Арка 1 «А» - образной формы, сварной конструкций прямоугольного сечения из листов, закрепляется шарнирно на задней части рамы трактора с помощью шарнирных подшипников. Имеет кронштейны: в средней части - для крепления гидроцилиндров, в верхней - для крепления стрелы. Приводится в действие двумя гидроцилиндрами 11 и служит для увеличения вылета захвата при наборе пачки.
Рисунок 3.9 – Машина МЛ-30 Стрела 2 коробчатого сечения из листовой низколегированной стали закреплена на арке, в верхней ее части, шарнирно. С одной стороны имеет плиту для крепления механизма поворота, с другой - поперечную балку с проушинами для крепления гидроцилиндров. Служит для подъема и опускания захвата при наборе пачки и ее трелевки. В стреле монтируется гидроцилиндр с системой блоков и канатом – двукратный полиспаст. При ходе штока гидроцилиндра 0,6 м, перемещение каната 1,2 м. Это позволяет подтягивать пачковый захват к раме трактора при холостом ходе, избегая его раскачивания и ударов, а также дает возможность захвату занимать необходимое положение при трелевке пачки. Максимальный угол отклонения захвата при трелевке пачки 45 градусов.
Рисунок 3.10 – Кинематическая схема привода технологического оборудования МЛ-30 Механизм поворота захвата 3 состоит из приводного устройства и поворотной колонки. Приводное устройство состоит из гидромотора, переходника и крестовой муфты. Поворотная колонка состоит из корпуса, вала с уплотнителями и подшипников. Корпус поворотной колонки крепится к стреле 2. К верхней части вала крепится переходник, на котором закреплен гидромотор. Передача крутящего момента от гидромотора к валу осуществляется через муфту. К нижней части вала с помощью серьги 9 подвешивается пачковый захват. Механизм поворота служит для подвески пачкового захвата и его поворота вокруг вертикальной оси. Пачковый захват с синхронизацией движения челюстей и с подвижными осями поворота состоит из челюстей, траверсы, тяг синхронизации, гидроцилиндра и тяг подвески. Гидроцилиндр снабжен обратным управляемым клапаном, который устанавливается в магистрали высокого давления и предотвращает утечку масла из поршневой полости гидроцилиндра, что исключает самопроизвольное открытие челюстей захвата. Пачковый захват служит для набора, зажима и удержания пачки при трелевки. Нижнее ограждение 12, служит для защиты агрегатов и узлов трактора при работе на лесосеке и усиления полурам. Для защиты радиатора трактора от повреждений ветвями, сучьями деревьев и подростом, на тракторе устанавливается ограждение радиатора 17, на котором монтируются фары 15. Для защиты от повреждений задних шин, трелюемой пачкой деревьев, трактор оснащается ограждением колес 14. Для защиты кабины и капота двигателя от нависших ветвей и тонких деревьев, трактор оборудуется тросовым ограждением 18. Работа гидросистемы Гидравлическая система предназначена для привода и управления навесным оборудованием машины. Гидравлическая принципиальная схема приведена на рисунке 3.11. В нее входят: – гидробак емкостью 0,2 м3; насос НШ–100А–3–Л ОСТ 13.1.92–87, установленные на базовом тракторе; – шесть гидрораспределителей типа ВЕХ 16.44.30/6АГ24ЕТ ГОСТ 24679–81 с электрогидравлическим управлением; – клапан предохранительный нормально открытого исполнения непрямого действия 20-20-2-223 ТУ2–053–1748–85 с электромагнитным управлением;
Рисунок 3.11 – Схема гидравлическая принципиальная
– гидромотор высокомоментный планетарно-роторный ГПР–Ф–630 ТУ105–0–1142–87; – перепускной клапан У1544.000; – в качестве исполнительных органов гидроцилиндры различных диаметров и ходов. Управление распределителями осуществляется с помощью электровыключателей, установленных на пульте и приборной панели кабины машины. Для работы трелевочного оборудования и толкателя включают соответствующие электровыключатели, управляя теми или иными органами технологического оборудования. Для надежной работы захвата и толкателя их гидроцилиндры снабжены гидрозамками. Гидрооборудование обеспечивает легкое и удобное раздельно-агрегатное управление технологическим оборудованием из кабины трактора с места оператора. Контрольные вопросы 1 Назначение пачкоподборщиков. 2 Основные технические особенности машин ЛТ-187, ЛТ-157, МЛ-30. 3 Опишите приемы работы пачкоподборщиков. 4 Из каких основных узлов состоят ЛТ-187, ЛТ-157, МЛ-30 и назовите назначение каждого узла? 5 Опишите работу пневматической системы ЛТ-157. 6 Каким набором машин и механизмов могут быть представлены системы машин для заготовки древесины в условиях лесосеки, в состав которых входит трелевочные машины ЛТ-187, ЛТ-157, МЛ-30? 7 Опишите работу гидравлической системы ЛТ-157, МЛ-30.
Форвардер John Deere 1710 Цель: изучение форвардера, конструкции, технологического процесса и работы устройств. Задание: 1 Изучить и законспектировать назначение и состав форвардера John Deere 1710. 2 Изучить общее устройство машины и схематически зарисовать ее общий вид. 3 Изучить приемы работы машины. 4 Изучить и зарисовать устройство машины. При выполнении работы студент под руководством преподавателя изучает по натурному образцу, схемам и методическим указаниям конструкцию оборудования, составляет письменный отчёт. Содержание отчета: 1 Назначение форвардера. 2 Техническая характеристика машины. 3 Рисунок форвардера. 4 Приемы работы машины. При защите лабораторной работы студент должен предъявить письменный отчёт и ответить на контрольные вопросы преподавателя. Для выполнения работы необходимо следующее оборудование и инструменты: 1. Изучаемая машина (или комплект специализированных плакатов). 2. Данное методическое указание. 3. Комплект канцелярских принадлежностей (бумага, ручка, карандаш, линейка).
Назначение форвардера Трелевочная машина (форвардер) предназначена для сбора и транспортировки сортиментов в полностью погруженном состоянии к погрузочной площадке. Форвардер может использоваться в районах с умеренным климатом с диапазоном температур от +30 до -30 . Данная модель форвардера предназначена для работы как на выборочных, так и на сплошных рубках. Технические данные форвардера John Deere 1710 Длина базовой машины, мм………………………………10050 Ширина, мм…………………………………………………2990 Высота машины, мм………………………………………...3900 Дорожный просвет, мм……………………………………..730 Масса в зависимости от комплектации, кг. ………не менее 18 500 Длина грузового отсека, мм.……………………………………4680 Ширина ,мм………………………………………………….2900 Площадь поперечного сечения, м2,………………………….5,4 Номинальная грузоподъемность, кг……………………….17000 Максимальная мощность при 2 200 об/мин, кВт (л.с)……….157(210) Емкость топливного бака, л………………………………….180 Максимальная скорость движения трактора, км/ч……………..23 Максимальное тяговое усилие, ……………………………..200 Рабочее давление в гидросистеме, МПа…………………….22 Максимальный вылет манипулятора, м……………………..8,5 Подъемный момент гидроманипулятора, брутто, кНм………151
Состав, устройство и работа форвардера Данная модель форвардера представляет собой шасси с шарнирно-сочлененной рамой. Передняя и задняя части рамы соединены универсальным шарниром с двумя степенями свободы. Таким образом, поворот машины осуществляется за счет изменения взаимного расположения полурам относительно вертикальной оси шарнира. Исполнительный механизм поворота представляет собой один или два гидроцилиндра для «излома» рамы в горизонтальной плоскости. Значение угла излома рамы находится в пределах 38-60°. Кроме того, универсальный шарнир позволяет полурамам наклоняться в вертикальной плоскости относительно друг друга на угол 15 градусов. Это разгружает раму при движении машины по пересеченной местности и обеспечивает высокую проходимость при значительной длине продольной базы. За счет возможности блокировки шарнира по горизонтальной оси обеспечивается повышенная устойчивость при работе машины в режимах погрузки и разгрузки, Данная модель форвардера имеет восьмиколесную ходовую систему 3, 13 (рисунок 4.1) с приводом на все колеса. Для снижения удельного давления машины на грунт ширина шин составляет 600 мм. При этом, по желанию покупателя, фирмы-производители машин могут оснащать их альтернативными шинами в зависимости от будущих условий эксплуатации (от 500 до 800 мм). Для повышения проходимости и снижения удельного давления на грунт на шины надеваются цетш или гусеничные ленты. Трансмиссия гидростатическая с двухдиапазонной раздаточной коробкой. Это обеспечивает плавное движение форвардера в лесу при высокой силе тяги (среднее значение составляет 140 кН) и благоприятно сказывается на взаимодействии машины с почвой. Максимальная скорость движения машин на первом скоростном диапазоне - 7 км/ч, на втором - 20 км/ч.
Рисунок 4.1 - Форвардер John Deere 1710
1 - отсек, двигателя; 2 - кабина; 3, 13 - ходовая система; 4 - опора; 5 - стрела; 6 - рукоять; 7 - захват; 8, 9 - гидроцилиндр; 10 - грузовая платформа; 11 - стайка; 12 - устройство поворота манипулятора; 14 - отсек гидростемы Компоновка машины состоит из следующих элементов (рисунок 11.1); на передней полураме располагается двигатель 1 и кабина оператора 2, на задней полураме - грузовая платформа 10 со стойками 11 для перевозки сортиментов. Технологическое оборудование - манипулятор с захватом -располагается на задней полураме перед грузовой платформой и отделяется от нее ограждением. Манипулятор состоит из опоры 4, стрелы 5, рукояти 6 и захвата 7. Поворот манипулятора в горизонтальной плоскости' осуществляется с помощью поворотного устройства 12. Работа манипулятора осуществляется с помощью гидроцилиндров 8, 9. Управление манипулятором - электрогидравлическое, с помощью двух рычагов, размещаемых на подлокотниках сидений оператора. Кабина оператора 2 располагается за двигателем. Кабины отличаются низким уровнем шума (ниже 72 дБ) и вибрации, эргономичным сиденьем и удобными органами управления. За кабиной на передней полураме располагаются бак гидросистемы и гидрораспределители 14. При работе на лесосеке форвардер подъезжает к пачке или отдельно лежащим сортиментам, с помощью гидроманипулятора загружает их на грузовую платформу и транспортирует на погрузочный пункт. На погрузочном пункте с помощью гидроманипулятора разгружает в штабель или в автолесовоз. Технологический процесс форвардера заключается в следующем. Машина подъезжает к группе или отдельно лежащим сортиментам и с помощью гидроманипулятора загружает их в грузовой отсек машины. При загрузке пачки машина переезжает к следующей. После загрузки грузового отсека форвардера сортименты доставляются на погрузочный пункт, где с помощью гидроманипулятора разгружаются в штабель или в автомобильный подвижной состав. При необходимости возможна сортировка сортиментов при загрузке или разгрузке форвардера. Контрольные вопросы 1. Назначение форвардера. 2. Назовите, из каких основных узлов в конструктивном плане состоит форвардер. 3. Расскажите конструкцию гидроманипулятора. 4. Расскажите технологический процесс работы форвардера. 5. Назовите основные преимущества и недостатки форвардера |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-06-01; просмотров: 3062. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |