|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Позиционные регуляторы реализуют принцип “включено-выключено” и разделяются на двух- и трехпозиционные.Статистические характеристики:
Статистические характеристики двухпозиционных (а,б) и трехпозиционных (в,г) регуляторов без зон неоднозначности (а,в) и с зонами неоднозначности (б,г)
Двухпозиционные регуляторы могут устанавливать выходную величину только на минимальном x1и максимальном x2 значениях. Переход между значениями совершается скачком при прохождении регулируемой величины через фиксированное или пороговое значение ε0.При работе с конкретным объектом статистические характеристики обычно настраиваются несимметрично относительно значения u. Трехпозиционные регуляторы могут устанавливать выходную величину помимо значений X1 и X2 и в промежуточном значении X0. Регулятор срабатывает при двух пороговых значениях ε1 и ε2.В пределах зоны нечувствительности Δн= ε2-ε1 выходная величина принимает значения X0. Отличается от двухпозиционной тем, что возможно прекращение автоколебательного процесса и достижения равновесного состояния, если соблюдается неравенство | ε |< Δн/2 т.е. регулируемая величина находится в пределах зоны чувствительности регулятора. Переходным процесом называют изменение во времени выходной величины системы от момента нанесения возмущающего или задающего воздействий до прихода ее в равновесное состояние. Он зависит от динамических свойств системы. Переходный процесс y(t) имеет составляющую свободного движения yc(t), определяемую свойствами системы и начальными условиями, и составляющую вынужденного движения yв(t), определяемую свойствами системы и видом воздействия. y(t)= yc(t)+ yв(t)
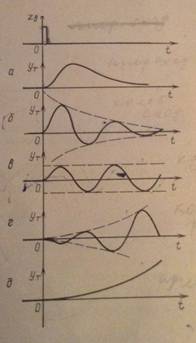
 При апериодическом сходящемся (а) процессе выходная величина yт плавно отклоняется от первоначального значения, затем система постепенно возвращается в равновесное состояние. При колебательном сходящемся (б) процессе выходная величина системы совершает колебания с постепенно уменьшающейся амплитудой. При колебательном гармоническом (в) процессе режим характеризуется постоянной амплитудой колебаний. При колебательном расходящемся (г) процессе амплитуда колебаний выходной величины системы постепенно возрастает со временем. Апериодический расходящийся (д) процесс характеризуется непрерывно возрастающим отклонением выходной величины системы от равновесного значения. Качество переходного процесса определяется по показателям, которые характеризуют отклонение реального процесса от желаемого. Оно количественно оценивается следующими показателями: Статическая ошибка регулирования yст есть рассогласование между установившимся значением регулируемой величины после переходного процесса и ее заданным значением yст=yт-uз Динамическая ошибка регулирования yдин есть максимальное отклонение регулируемой величины в переходном процессе от ее заданного значения yдин= yтmax- uз Время регулирования tp есть отрезок, в течение которого регулируемая величина достигает нового установившегося значения с некоторой заранее установленной точностью +-ɛ. Перерегулирование представляет собой максимальное отклонение регулируемой величины от установившегося значения, выраженное в процентах, от yст : ϕ= Интегральная квадратичная ошибка регулирования представляет собой квадрат площади между кривой переходного процесса и новым установившимся состоянием системы : I = |
||
|
|
Последнее изменение этой страницы: 2018-04-11; просмотров: 511. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 <= Регулятор
<= Регулятор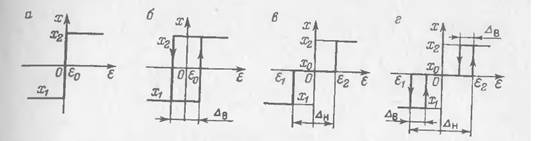
 В разных системах переходные процессы протекают различно.
В разных системах переходные процессы протекают различно. *100%
*100%