|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Составить уравнение движения АСР с нейтральным объектом 1го порядка без запаздывания и пропорционально-интегральным регулятором.
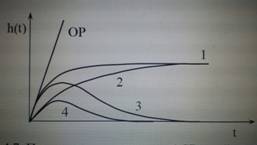
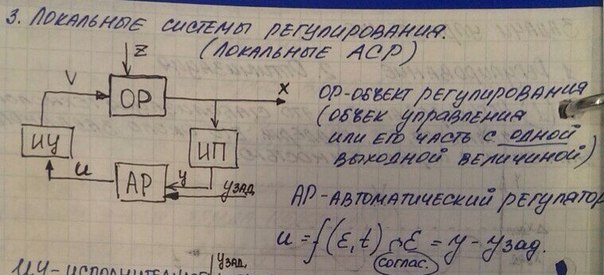
Переходные процессы в АСР с нейтральным объектом 1-го порядка: 3–с ПИ-регулятором Рассмотрим работу автоматической системы регулирования с ПИ-регулятором: ОР:Т0+x= kнz–k0v; ИП: y= kипx; АР: u= kpy+ (1/Ти)∫0tydt ; ИУ: v= kиуu. Для составления уравнения динамики АСР подставим уравнения элементов системы в уравнение ОР. Получим: Т0(dx/dt)+x= kнz–k0kиу(kpkипx + ∫0t kипxdt); Т0(dx/dt)+x+ k0kиуkpkипx+(k0kиуkpkип/Tu) ∫0t xdt = kнz; ToTu/(k0kиуkип)dx/dt+Tu((1+k0kиуkpkип)/( k0kиуkип ))x = (kн/( k0kиуkип )) z. После дифференцирования и введения обозначений получим: T12(d2x/dt2) + T2(dx/dt)+ х = T3(dz/dt), где T12= ToTu/(k0kиуkип), T2= Tu(1+k0kиуkpkип)/( k0kиуkип ), T3=kн/( k0kиуkип. Для нахождения переходной характеристики необходимо решить это уравнение. Так как z =1(t), то (dz/dt)=0. И полученное неоднородное уравнение второго порядка обращается в однородное. Общий вид решения такого уравнения зависит от корней характеристического уравнения: T12p2+ T2p+ 1 = 0; p1,2= (T2+/-( T22- 4T12)^1/2)/2*T12. В зависимости от знака дискриминанта D= T22- 4T12 корни характеристического уравнения могут быть вещественными или комплексными. Предположим, что D>0. Тогда решение уравнения T12(d2x/dt2) + T2(dx/dt)+ х = T3(dz/dt), имеет вид: х = С(ep1t-ep2t), где C = kн/D^1/2 – постоянная интегрирования (находится из начальных условий), р1 и р2 –корни характеристического уравнения. Из графика переходного процесса видно, что регулируемая величина АСР возвращается точно к заданному значению. Можно показать, что скорости изменения выходной величины в объекте и в системе в начальный момент времени в данном случае одинаковы. Вывод: главное достоинство работы регуляторов с интегральной составляющей в АСР – отсутствие статической ошибки регулирования.  На рисунке показаны переходные процессы АСР, состоящих из нейтрального объекта 1-го порядка и различных регуляторов. На нейтральных объектах не используют И-регуляторы, так как в этом случае в системе возникают гармонические колебания регулируемого параметра с большой амплитудой. Конденсатор - элемент электрической цепи, предназначенный для использования его электрической емкости. Конденсатор состоит из двух или более проводников (обкладок) , разделенных слоем диэлектрика, толщина которого мала по сравнению с размерами проводников. Схема АСР:
Цели автоматизации: Научные – Повышение эффективности и качества научных результатов за счет более полного исследования моделей Повышение точности и достоверности результатов исследований за счет оптимизации эксперимента. Получение качественно новых научных результатов, невозможных без ЭВМ. Технические- Повышение качества продукции за счет повторяемости операций, увеличения числа измерений и получения более полных данных о свойствах изделий. 2).Повышение надела точности изделий за счет получения более полных данных о процессах старения и их предшественниках. Экономия трудовых ресурсов за счет замены труда человека трудом машины. Сокращение затрат в промышленности за счет уменьшения трудоемкости работ. Экономические- Экономия трудовых ресурсов за счет замены труда человека трудом машины. 2).Сокращение затрат в промышленности за счет уменьшения трудоемкости работ. Социальные- 1). Повышение интеллектуального потенциала за счет поручения рутинных операций машине. 2).Ликвидация случаев занятости персонала операций в нежелательных условиях. 3). Освобождение человека от тяжелого физического труда и использование сэкономленного времени для удовлетворения духовных потребностей. 39.Позиционные регуляторы несложны по конструкции, надежны в работе, просты в обслуживании и настройке. Их применяют на инерционных объектах с малым запаздыванием. |
||
|
|
Последнее изменение этой страницы: 2018-04-11; просмотров: 475. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |