|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
PЕОСТАТНОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ⇐ ПредыдущаяСтр 21 из 21 Реостатное регулирование скорости АД возможно при дискретном (ступенчатом) изменении сопротивления в цепи ротора или при плавном (импульсном) его регулировании. Рассмотрим сначала ступенчатое регулирование скорости АД.
При изменении статического момента от Мс.min до Мс.max максимальное отклонение скорости Dwmax от среднего значения составит
где bmin – минимальное значение модуля жесткости на искусственной (реостатной) механической характеристике. Диапазон D регулирования скорости определяют, исходя из допустимого значения относительного падения скорости на низшей реостатной характеристике
Принимая
находим
и подставляем в (8.61):
откуда получаем
Практически диапазон регулирования скорости находится в пределах 1,5 Достоинство реостатного регулирования заключается в простоте и невысоких затратах на реализацию. Недостаток состоит в том, что при постоянном моменте нагрузки потери мощности в роторе пропорциональны снижению скорости:
При М=Мном и wо»wном получаем
т.е. с увеличением диапазона D регулирование скорости потери мощности возрастают. Электромагнитныйк.п.д. при реостатном регулировании
как следует из этого выражения, обратно пропорционален диапазону регулирования скорости.  При реостатном регулировании асинхронный двигатель работает при скольжениях, меньше критического, поэтому магнитный поток можно считать практически постоянным. Это значит, что регулирование скорости осуществляется при постоянном допустимом моменте, если охлаждение двигателя независимое. В связи с этим реостатное регулирование скорости целесообразно применять для электроприводов, работающих с постоянным статическим моментом (например, грузоподъемные механизмы).
1.17. ЧАСТОТНОЕ УПРАВЛЕНИЕ АСИНХРОННЫМ ДВИГАТЕЛЕМ ПО ЗАКОНУ СТАБИЛИЗАЦИИ ПОТОКОСЦЕПЛЕНИЯ СТАТОРА (Ψ1 = CONST). На основании
из которой определяется действующее значение ЭДС статора :
где Ks – коэффициент магнитной связи статора .Из Рис.8.21 и принятых обозначений (8.146) следует , что приведенный ток ротора : С учетом (8.145) получаем : где действующее значение номинальной ЭДС статора Es.ном :
Активное сопротивление Подставляя (8.149) в (8.151) , находим На эквивалентной схеме Рис.8.21 выделим сопротивления : Z2 –сопротивление нагрузки , где выделяется электромагнитная мощность одной фазы АД , а сопротивление Z1 можно рассматривать как внутреннее сопротивление источника ЭДС Еs . Известно , что в нагрузке выделяется максимальная мощность , если Z1=Z2, т.е. и электромагнитную мощность : Критический (максимальный ) электромагнитный момент :
Механические характеристики асинхронного двигателя при частотном управлении по закону Y1= const выражаются параметрическим уравнением Жесткость этих механических характеристик где Рис.8.11- Механические характеристики АД при частотном управлении по закону ψ1 = const Критические моменты АД при Y1= const и на естественной характеристике для двигательного режима относятся как :
Для токов , соответствующих критическим скольжениям , имеем отношение
Отношение (8.162) показывает , что критический момент АД при частотном управлении по закону Y1= const близок к критическому моменту двигателя на естественной характеристике . Это же можно сказать и про токи. Что касается потокосцепления взаимоиндукции Ym , которое определяется ЭДС взаимоиндукции E1 (f1ном ) при номинальной частоте f1ном , то на основании эквивалентной схемы Рис.8.21 можно найти
Следовательно, при увеличении нагрузки (абсолютного скольжения sa) потокосцепление взаимоиндукции будет уменьшаться примерно также как на естественной характеристике АД. Можно отметить , что при частотном управлении АД по закону Y1= const свойства двигателя подобны свойствам при работе его на естественной характеристике, за исключением скорости. Поэтому данный вид скалярного частотного управления довольно широко используется. При реализации этого закона частотного управления необходимо обеспечивать на обмотках статора АД напряжение где При этом, по обмоткам фаз статора будет протекать ток
1.18. ЧАСТОТНОЕ УПРАВЛЕНИЕ АСИНХРОННЫМ ДВИГАТЕЛЕМ ПО ЗАКОНУ СТАБИЛИЗАЦИИ ПОТОКОСЦЕПЛЕНИЯ ВЗАИМОИНДУКЦИИ (ΨM = CONST). Используя
Номинальное значение ЭДС взаимоиндукции Е1.ном:
Для эквивалентной Т-образной схемы АД , показанной на Рис.8.14 ,
можно определить приведенное значение тока ротора
Электромагнитный момент АД: Принимая aX/2ном как внутреннее сопротивление источника Е1 и
Находим ток I/2 , соответствующий абсолютному скольжению и электромагнитную мощность а также критический (максимальный ) момент Критические моменты АД при Ym = const и на естественной характеристике находятся в отношении
В зависимости от параметров двигателя это отношение может составлять 2¸3 и более . Увеличение критического момента связано с увеличением тока при критическом скольжении в ni раз :
Механические характеристики АД при частотном управлении по закону Ym = const определяются параметрическим уравнением
Жесткость этих характеристик представляется: Поэтому все механические характеристики конгруэнтны и подобны характеристикам , показанным на Рис.8.11 , с той лишь разницей , что кратность критического момента к номинальному будет равна lm×nM.
по закону ψm = const Необходимая величина действующего значения напряжения при частотном управлении АД по закону Ym = const: где При данном напряжении по фазе обмотки статора будет протекать ток
1.19.ЧАСТОТНОЕ УПРАВЛЕНИЕ АСИНХРОННЫМ ДВИГАТЕЛЕМ ПО ЗАКОНУ СТАБИЛИЗАЦИИ ПОТОКОСЦЕПЛЕНИЯ РОТОРА (Ψ2 = CONST). Из
можно видеть, что при поддержании отношения Для выполнения этого условия необходимо: где E//2.ном – ЭДС ротора , принятая для w1.ном =2pf1.ном . Приведенный ток ротора АД где Электромагнитный момент трехфазного асинхронного двигателя
рп – число пар полюсов АД .
Уравнение механических характеристик АД:
выразим Окончательное уравнение механических характеристик АД при частотном управлении по закону Y2 = const : При постоянной жесткости b , если не учитывать насыщение магнитной системы двигателя , механические характеристики АД, будут линейными (Рис.8.22).
При частотном управлении по закону Y2 = const потокосцепление взаимоиндукции Ym изменяется с изменением нагрузки (абсолютного скольжения sa ).
где Наибольшее значение Y2 следует определять из допустимой величины Ym,доп при максимальной нагрузке
Необходимая величина действующего значения напряжения , подаваемого на фазную обмотку АД при частотном управлении по закону Y2 = const , может быть рассчитано на основании эквивалентной Т-образной схемы Рис.8.14:
где
1.20. ЧАСТОТНОЕ УПРАВЛЕНИЕ АСИНХРОННЫМ ДВИГАТЕЛЕМ ПРИ СТАБИЛИЗАЦИИ АБСОЛЮТНОГО СКОЛЬЖЕНИЯ (SА = CONST). При управлении асинхронным двигателем по закону М.П. Костенко (8.99) :
абсолютное скольжение остается практически неизменным. Отсюда следует, что если на всех частотах поддерживать абсолютное скольжение неизменным, то режим работы АД будет близок к режиму при управлении по (8.99). Скорость АД: при
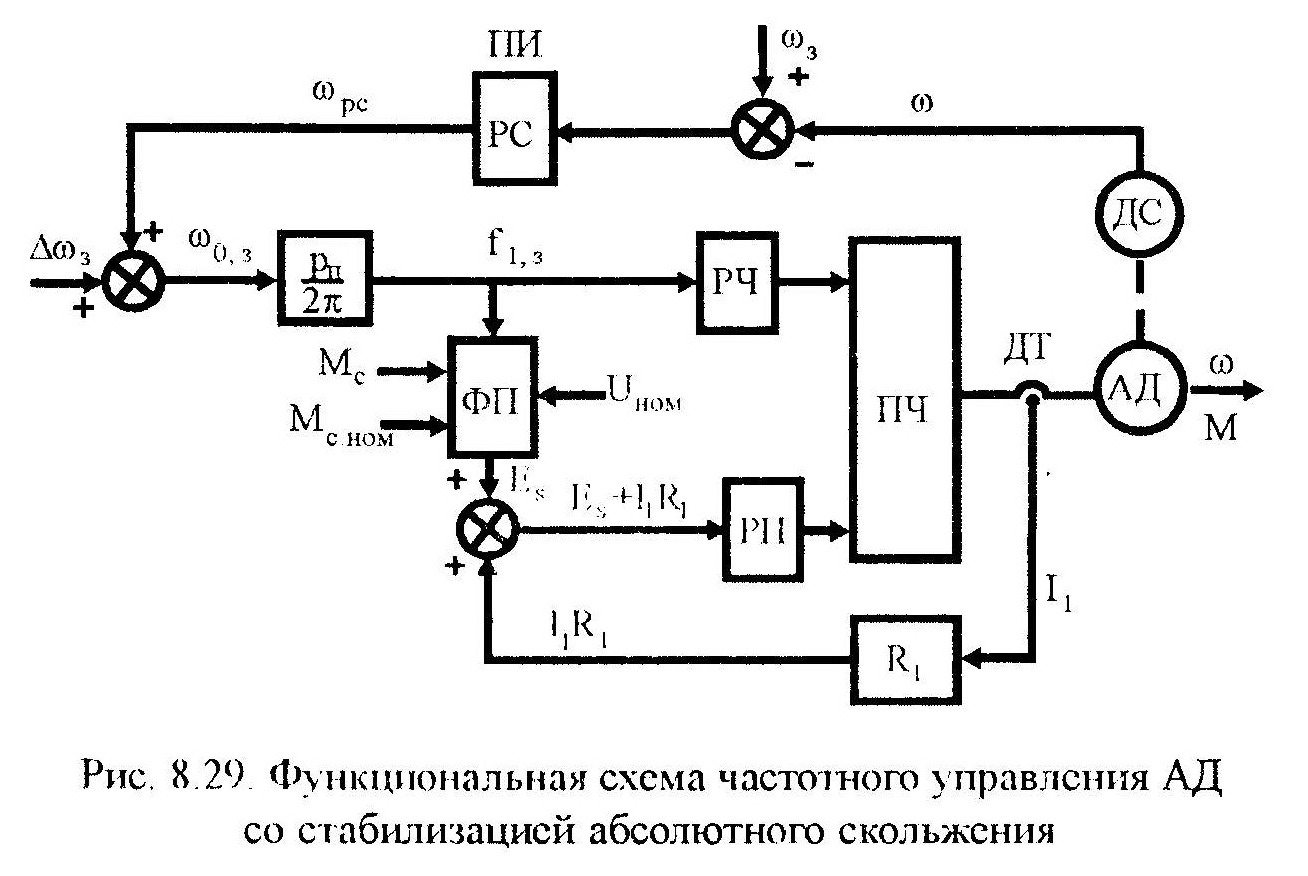
Рассмотрим функциональную схему реализации частотного управления при
где
В данной системе частотного управления АД с помощью датчика скорости ДС измеряется угловая скорость ω двигателя, которая сравнивается с заданным значением Функциональный преобразователь ФП на основе информации о номинальном напряжении Uном, номинальном моменте Мном (или номинальном токе), текущем статическом моменте (или токе статора) формирует в соответствии с (8.238) значение ЭДС статора Еs, которая суммируется с падением напряжения I1R1, определяя выходное напряжение U преобразователя частоты ПЧ. В установившемся режиме В рассмотренных системах частотного управления АД величины переменного тока принимались синусоидальными. В реальных системах ПЧ-АД выходное напряжение преобразователя несинусоидальное, поэтому все законы частотного управления и соотношения между величинами будут справедливы применительно к первым (основным) гармоникам несинусоидальных периодических величин.
|
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 845. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 Введение добавочного сопротивления Rд в цепь ротора АД при постоянном статическом моменте приводит к снижению скорости (рис.8.8).
Введение добавочного сопротивления Rд в цепь ротора АД при постоянном статическом моменте приводит к снижению скорости (рис.8.8). (8.60)
(8.60) (8.61)
(8.61) (8.62)
(8.62) (8.63)
(8.63) (8.64)
(8.64) (8.65)
(8.65) 2. Обычно берут число дискретных ступеней n=3
2. Обычно берут число дискретных ступеней n=3  (8.66)
(8.66) (8.67)
(8.67) (8.68)
(8.68) и
и  можно записать пропорцию :
можно записать пропорцию : (8.144)
(8.144) (8.145)при частотном управлении по закону Y1= const.
(8.145)при частотном управлении по закону Y1= const. Преобразуем эквивалентную Т-образную схему (Рис.8.14): в Г-образную
Преобразуем эквивалентную Т-образную схему (Рис.8.14): в Г-образную Для получения характеристик и выяснения свойств АД при частотном управлении по указанному закону вынесем намагничивающий контур эквивалентной Т-образной схемы Рис.8.14 на зажимы a-b (Рис.8.21) , изменив при этом параметры схемы в соответствии с теорией электрических машин . Обозначим :
Для получения характеристик и выяснения свойств АД при частотном управлении по указанному закону вынесем намагничивающий контур эквивалентной Т-образной схемы Рис.8.14 на зажимы a-b (Рис.8.21) , изменив при этом параметры схемы в соответствии с теорией электрических машин . Обозначим : (8.146)
(8.146) (8.147)
(8.147) (8.148)
(8.148) (8.149)
(8.149) (8.150)
(8.150) на Рис.8.21 является эквивалентом для неподвижного АД , где выделяется электромагнитная мощность. Поэтому электромагнитный момент трехфазного АД можно записать в виде
на Рис.8.21 является эквивалентом для неподвижного АД , где выделяется электромагнитная мощность. Поэтому электромагнитный момент трехфазного АД можно записать в виде  (8.151)
(8.151) (8.152)
(8.152)

 (8.153), отсюда находим абсолютное критическое скольжение
(8.153), отсюда находим абсолютное критическое скольжение  (8.154).Определим ток
(8.154).Определим ток  , соответствующий абсолютному критическому скольжению , подставляя (8.154) в (8.149) :
, соответствующий абсолютному критическому скольжению , подставляя (8.154) в (8.149) :  (8.155)
(8.155) (8.156)
(8.156) (8.157)
(8.157)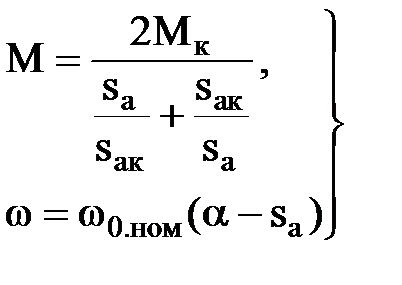 (8.158)
(8.158) (8.159)
(8.159) (8.160)Взяв частную производную от (8.160) по sa и подставив в (8.158) , получим
(8.160)Взяв частную производную от (8.160) по sa и подставив в (8.158) , получим  (8.161)
(8.161)  , т.е. жесткость механической характеристики остается неизменной для всех частот a при любом постоянном значении момента (sa = const) . Следовательно , механические характеристики АД будут подобными ( конгруэнтными ) при разных частотах . Их вид будет такой же , как и вид характеристик , приведенных на Рис.8.11 .
, т.е. жесткость механической характеристики остается неизменной для всех частот a при любом постоянном значении момента (sa = const) . Следовательно , механические характеристики АД будут подобными ( конгруэнтными ) при разных частотах . Их вид будет такой же , как и вид характеристик , приведенных на Рис.8.11 . (8.162)
(8.162) (8.163)
(8.163) (8.164)
(8.164) (8.165), где
(8.165), где 
 (8.166)
(8.166) и
и  ,
,
 и
и  , записываем пропорцию
, записываем пропорцию (8.168)
(8.168) закон изменения ЭДС взаимоиндукции E1 при изменении относительной частоты a: Е1 = aЕ1.ном , (8.169)
закон изменения ЭДС взаимоиндукции E1 при изменении относительной частоты a: Е1 = aЕ1.ном , (8.169) (8.170)
(8.170) (8.171)
(8.171) (8.172)
(8.172) как сопротивление нагрузки , запишем условие максимальной мощности нагрузки
как сопротивление нагрузки , запишем условие максимальной мощности нагрузки (8.173)
(8.173)  (8.174)
(8.174) (8.175)
(8.175) (8.176)
(8.176)
 (8.178)
(8.178) (8.179)
(8.179) (8.180)
(8.180) и
и  .
. (8.181)
(8.181) и
и  ,
,  и эквивалентной Т-образной схеме Рис.8.14,
и эквивалентной Т-образной схеме Рис.8.14, (8.182)
(8.182) (8.183)
(8.183) (8.184)
(8.184) (8.185)
(8.185)  (8.186)
(8.186) - модуль жесткости механической характеристики АД.
- модуль жесткости механической характеристики АД. (8.187)
(8.187) (8.188)
(8.188) (8.189)
(8.189)


 (8.191)
(8.191) (8.192)
(8.192) (8.193)
(8.193) (8.194)
(8.194) (8.99)
(8.99) (8.236)
(8.236) =const и данном α будет постоянной при изменении нагрузки, поскольку каждому значению момент М соответствует своя величина напряжения U (см. рис. 8.28).
=const и данном α будет постоянной при изменении нагрузки, поскольку каждому значению момент М соответствует своя величина напряжения U (см. рис. 8.28).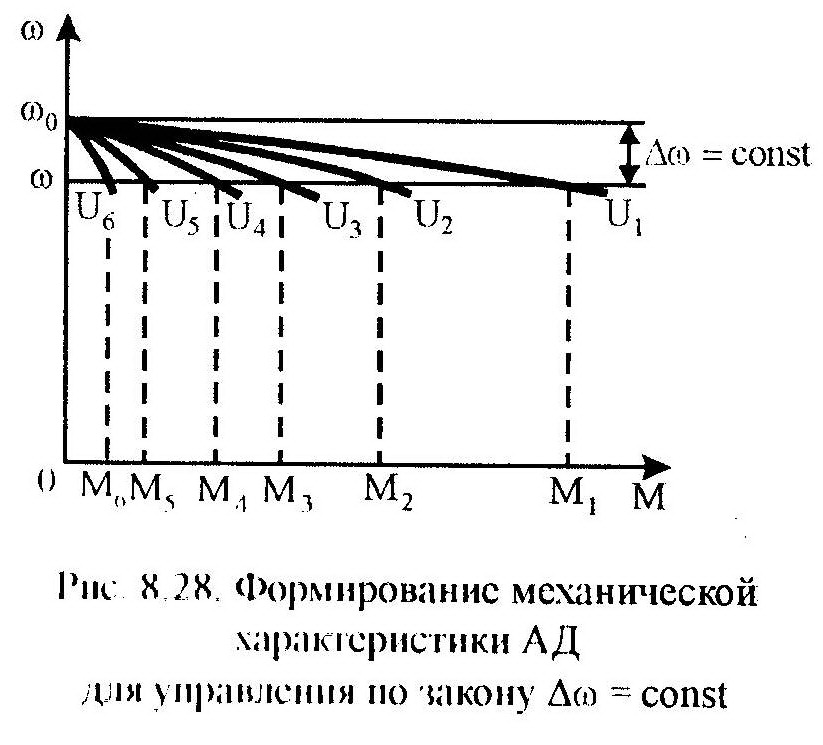
 =const (рис. 8.29), соответствующую следующим соотношениям:
=const (рис. 8.29), соответствующую следующим соотношениям: (8.237)
(8.237) (8.238)
(8.238) – заданное значение угловой скорости АД,
– заданное значение угловой скорости АД, – заданное абсолютное скольжение
– заданное абсолютное скольжение – заданное значение синхронной угловой скорости АД, которое определяет задающую частоту
– заданное значение синхронной угловой скорости АД, которое определяет задающую частоту  .
.
 и их разность Δω направляется в ПИ-регулятор скорости РС, выходная величина которого
и их разность Δω направляется в ПИ-регулятор скорости РС, выходная величина которого  суммируется с заданным падением скорости
суммируется с заданным падением скорости  , формируя заданное значение синхронной угловой скорости
, формируя заданное значение синхронной угловой скорости  и соответственно частоты
и соответственно частоты