|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Модифицированный алгоритм линейной интерполяции по МОФ Пример..
Усовершенствованный метод оценочной функции позволяет повысить скорость отработки перемещения, которая в случае траектории под углом 45° может быть повышена в 2 раза. Минимальная скорость подачи определяется по выражению: vмин=h/Tн h – единичный шаг, определяемый дискретностью системы, Tн – время реализации алгоритма подачи. Требуемая частота импульсов определяется скоростью подачи и углом наклона к осям.
Погрешность расчета траектории по данному методу не превышает дискретности системы ЧПУ
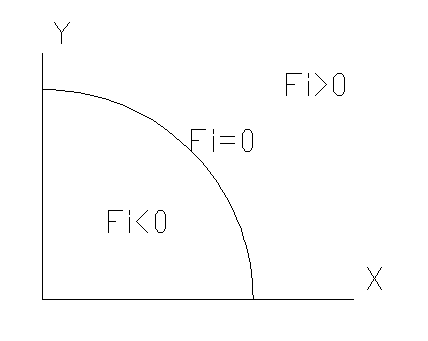
23.Круговая интерполяция по методу оценочной функции. Пример.Применение оценочной функции для круговой интерполяции производится тем же способом, что и для линейной. Xi2+yi2=R2 Fi= xi2+yi2-R2
Знак оценочной функции определяет операцию управления на следующем шаге. Для интерполяции по дуге окружности необходимо знать центр квадранта, координаты начальной и конечной точек, а также радиус дуги окружности. Для воспроизведения дуги окружноcти в 1-м квадранте. F>0 xi+1=xi-1 yi+1=y
Если оценочная функция больше 0, то делается шаг по координате х (по у неизменна) F>0 xi+1=xiyi+1=y+1 После очередного шага осуществляется сравнение текущих координат с конечными и если они не совпадают, то алгоритм повторяется. Определим оценочную функцию после следующего шага по координате х. Fi+1=(xi-1)2+yi2-R2=Fi-2x+1 Определим оценочную функцию после следующего шага по координате y. Yi+1=y+1 xi+1=x Fi+1=xi2+(yi+1)2-R2=Fi+2yi+1
24.Модифицированный алгоритм круговой интерполяции по МОФ. Пример.для повышения контурной скорости можно усовершенствовать алгоритм круговой интерполяции. усовершенствование алгоритма закл в том что как и при линейн. интерполяции по ведущей коорд-те приращения выдаются на каждом шаге.отличие от линейн интерполяции в данн случае закл в следующем:если участок интерполяции в пределах одного квадранта охватывает угол 
Введём обозначения
25.Интерполяция на основе цифровых дифференциальных анализаторов примерИнтерполяция с использов.ЦДА заключается в моделировании дифуравнений воспроизв.траектории с помощью специальных вычислительных устройств,называемых дифференциальными анализаторами.В данном методе в отличии метода оценочн. ф-иимоделируется не алгебраич. ур-ние а его 1-ая производная или дифф.уравнение.Решение дифуравнений с помощью ЦДА осуществл. путём перехода к разностным ур-ниям с последующим их решением.В связи с чем задача интерполяции по методу ЦДА сводится к следующему:1)Находится обыкновенное дифуравнение,решение которого является уравнение траектории рабочего органа.2)Составляется аналоговая модель для решения данного ур-ния.3)на основе аналоговой модели строится ЦДА, осуществляющий решение ур-ний в цифровом виде(разностном виде). Для интерполяции прямолинейного участка траектории:
Рис а: для линейн интерполят-ра по коорд-те у. В регистр RG запис. знач-е подынтегральн. ф-ии,которая через элем-ты И подаётся на если
|
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 563. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |



 ,то ведущая координата меняется и это изменение происходит при
,то ведущая координата меняется и это изменение происходит при  .
.
 и для определения ведущей координаты вычислим разность
и для определения ведущей координаты вычислим разность  тогда получим что
тогда получим что  -ведущая координата при (
-ведущая координата при (  )<0,
)<0,  -ведущая координата при (
-ведущая координата при (  ,Таким образом, при
,Таким образом, при  и движении в пределах
и движении в пределах  выдача шагов производится по обеим координатам а при
выдача шагов производится по обеим координатам а при  -только по ведущей координате т е
-только по ведущей координате т е  .при
.при  и
и  выдача шагов производится по обеим координатам при
выдача шагов производится по обеим координатам при  -только по ведущей коорд-те т е
-только по ведущей коорд-те т е  .из рисунка видно что при модифицированном алгоритме круговой интерпол-ии по МОФ затрачивается меньше шагов это приводит к увеличению контурной скорости отработки траектории.
.из рисунка видно что при модифицированном алгоритме круговой интерпол-ии по МОФ затрачивается меньше шагов это приводит к увеличению контурной скорости отработки траектории. ,
,  ,
,  -приращение по соответствующим координатам.
-приращение по соответствующим координатам.  (1)для реализации кругового интерполятора запишем уравнение окружности:
(1)для реализации кругового интерполятора запишем уравнение окружности:  ;
;  ;
;  ;Вычисление интеграла в цифровой технике мож.быть выполнено по формулам прямоугольника и трапеции.
;Вычисление интеграла в цифровой технике мож.быть выполнено по формулам прямоугольника и трапеции.  (3)
(3) 
 ;Так как в устр-вах ЧПУ процессы интерполяции и выдачи управляющих команд между собой не связаны,то масштабные множители
;Так как в устр-вах ЧПУ процессы интерполяции и выдачи управляющих команд между собой не связаны,то масштабные множители  принять=1,тогда система(3) будет преобразована к виду:
принять=1,тогда система(3) будет преобразована к виду: 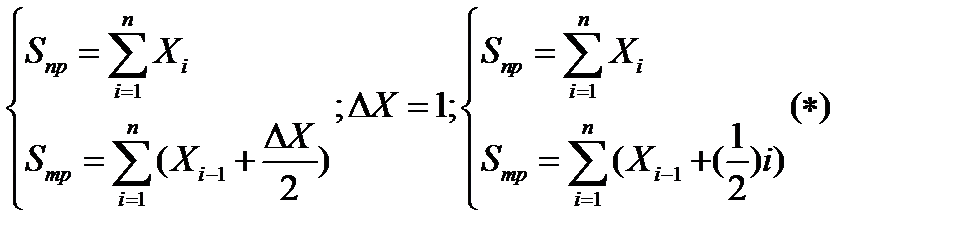 ;так как выходной сигнал интерполят. выдаёт в унитарн. коде,то приращение по координате нулевое или единичное.Ур-ния для трапеции и прямоуг. приобретают вид(*).На основе ур-ния(*) составл. схема интегратора,который может быть реализован параллельн. либо последов. переносом.
;так как выходной сигнал интерполят. выдаёт в унитарн. коде,то приращение по координате нулевое или единичное.Ур-ния для трапеции и прямоуг. приобретают вид(*).На основе ур-ния(*) составл. схема интегратора,который может быть реализован параллельн. либо последов. переносом. 
 ,при этом временные интервалы опред-тся тактовой частотой генератора,который задаёт масштабн. множ-ль
,при этом временные интервалы опред-тся тактовой частотой генератора,который задаёт масштабн. множ-ль  .частота переполнения этих имп-сов прямо пропорц числу
.частота переполнения этих имп-сов прямо пропорц числу  .связь между вых частотой и
.связь между вых частотой и  :
: 
 =
=  ,то приращ-е переменн по коорд-те у будет постоянно,т.е . движ-е будет происх с пост скоростью.Если величина подынтегр ф-ии
,то приращ-е переменн по коорд-те у будет постоянно,т.е . движ-е будет происх с пост скоростью.Если величина подынтегр ф-ии  (5) ;
(5) ; 