|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
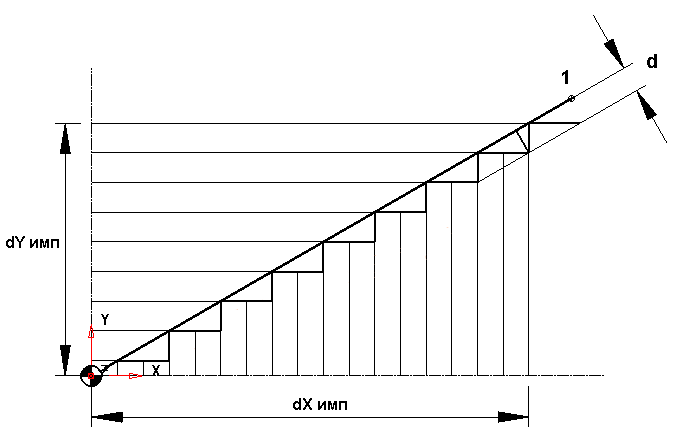
Программирование линейной и круговой интерполяции. Пример.Линейная интерполяция: Управляющая программа обработки детали представляет собой траекторию движения центра фрезы. Траектория движения состоит из отдельных, соединяющихся друг с другом участков, линейных или дуговых. Точки, которые задают траекторию, называются опорными. В действительности управляющая программа – это последовательный набор опорных точек. Опорные точки могут лежать в плоскости, для их задания используется две координаты (двух координатная обработка) или в пространстве (объемная трех координатная обработка). Чтобы использовать линейный интерполятор (осуществлять программирование линейных перемещений) используется подготовительная функция G01 и указываются координаты конечной точки перемещения с заданной скоростью.
X, Y, Z – адреса линейных осей;F – скорость перемещения;
Например, для программирования прямолинейного перемещения из точки A в точку B со скоростью 1000 мм/мин необходимо в УП сформировать следующий кадр: 
Круговая интерполяция: Под круговой интерполяцией следует понимать движение инструмента по дуге. Первые системы ЧПУ оснащались линейными интерполяторами и программирование такого движения для программиста было затруднено. Дуги и окружности приходилось аппроксимировать прямыми линиями, т.е. просчитывать промежуточные точки. На рисунке ниже необходимо линейно аппроксимировать участок дуги AB. Отклонение Зная допустимую погрешность аппроксимации d можно рассчитать угловой шаг df = arcos((R-d)/R), a число сегментов аппроксимации на заданном участке n = f2-f1/df. Линейно-круговые интерполяторы позволяют отработать движение как по прямой, так и по дуге. Это избавило инженеров-программистов от рутинных вычислений. |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 560. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
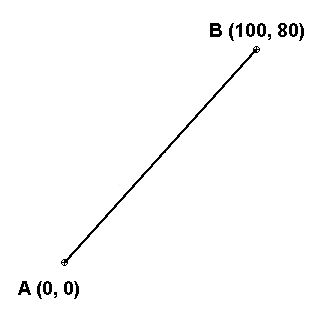 G01 X n.n Yn.n Z n.n Fn.n,где
G01 X n.n Yn.n Z n.n Fn.n,где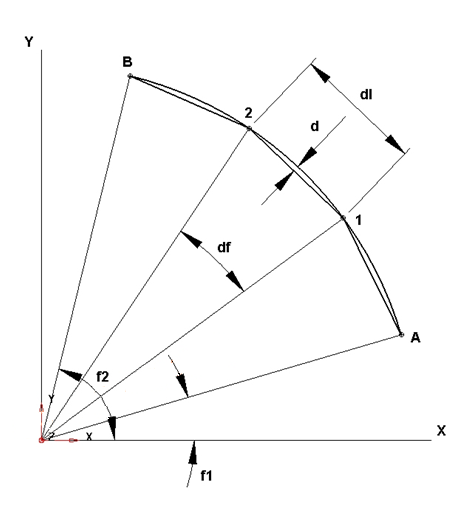 (погрешность) от округлости с радиусом R определяется расстоянием d, очевидно, что чем меньше величина линейного участка dl, тем выше точность аппроксимации.
(погрешность) от округлости с радиусом R определяется расстоянием d, очевидно, что чем меньше величина линейного участка dl, тем выше точность аппроксимации.