|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Интерполяция методом цифрового интегрирования. пример.Метод цифрового интегрирования (МЦИ) заключается в том, что приращения по координатам вычисляются за определённый кварт времени и могут отличаться от единичных. При использовании метода цифрового интегрирования значение i-той координаты и скорость её изменения в момент времени t могут быть вычислены по формулам:
Определение траектории движения формируется путём задания закона изменения ускорения в функции времени Наиболее трудоёмким методом цифрового интегрирования является метод Эйлера:
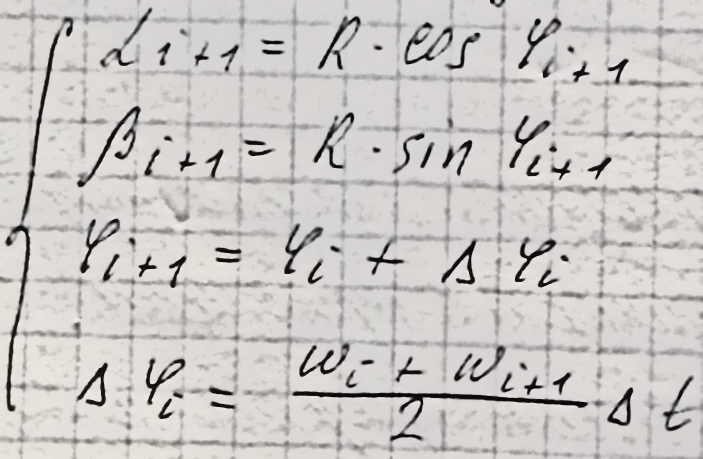
Реализация круговой интерполяции требует решения ДУ окружности. Для обеспечения требуемой точности требуется использование алгоритмов, которые требуют дополнительных затрат и времени. Поэтому на практике применяются более простые методы приближённого расчёта. Аналогично уравнениям при линейной интерполяции, уравнения для угловой интерполяции будут иметь вид:
Система ЧПУ формирует сигнал задания скорости на привода, которые получаются путём расчёта приращений по координатам
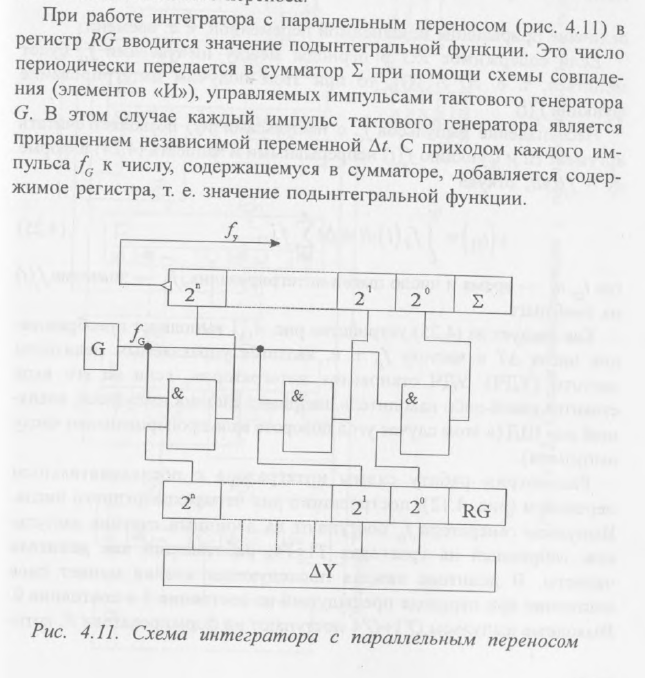
27.Интерполятор на основе интегратора с параллельным переносом. схема
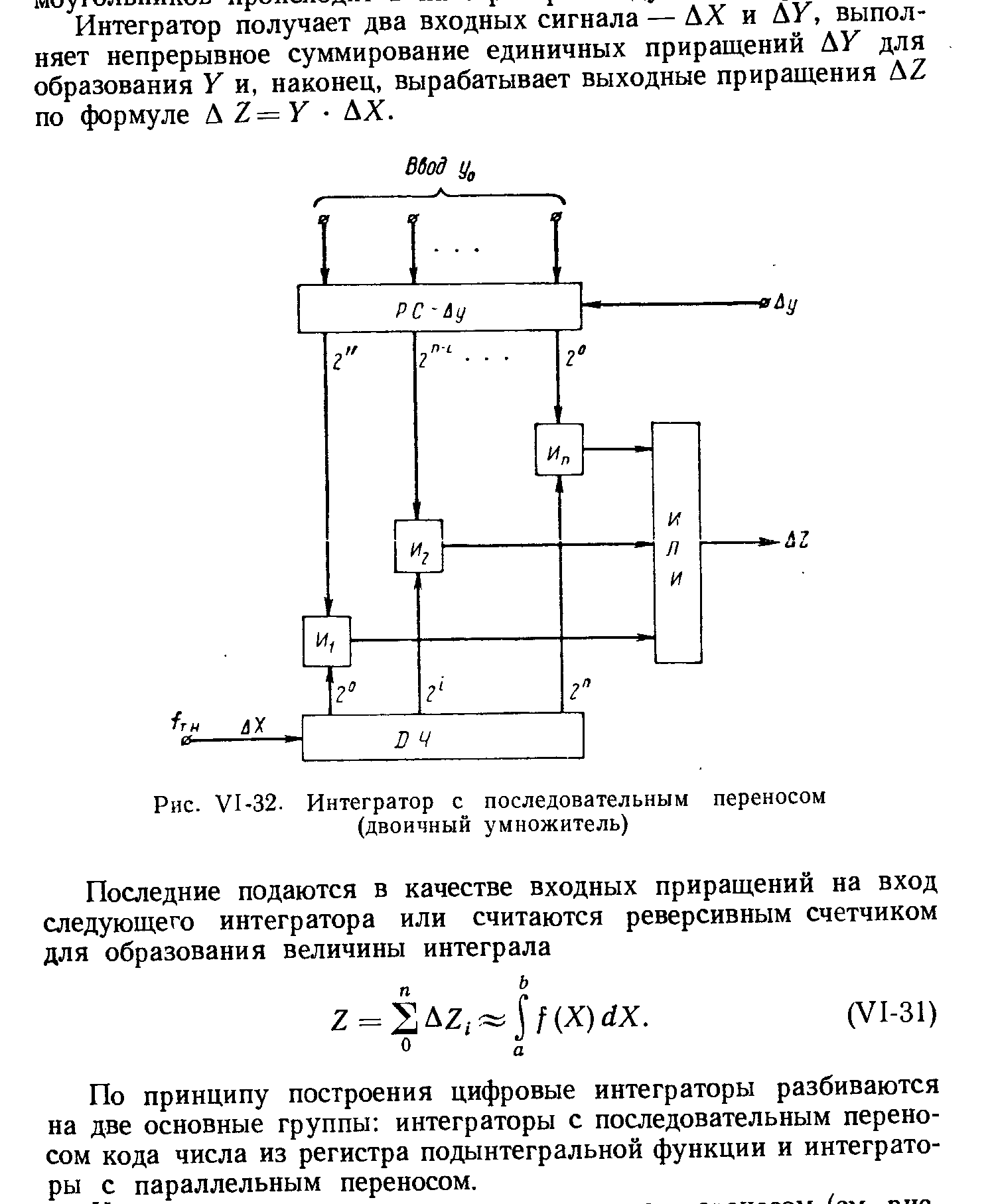
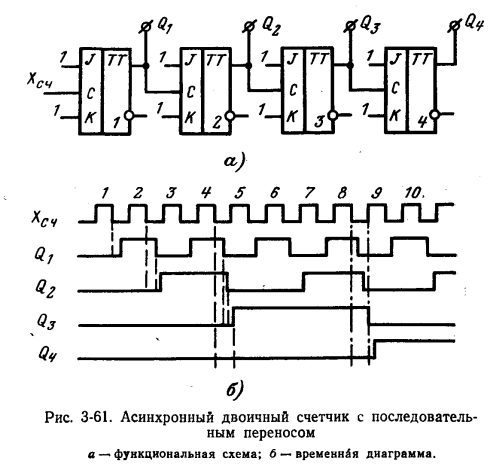
28.Интерполятор на основе интегратора с последовательным переносом Сигнальная диаграмма.
|
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 419. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

 .
.
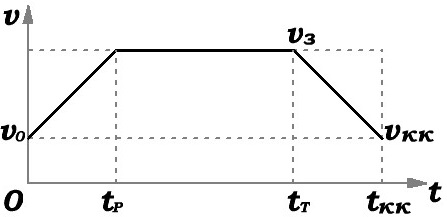 При реализации линейной интерполяции изменение скорости происходит по следующей диаграмме:
При реализации линейной интерполяции изменение скорости происходит по следующей диаграмме:
 На основании рисунка можно записать следующие выражения:
На основании рисунка можно записать следующие выражения: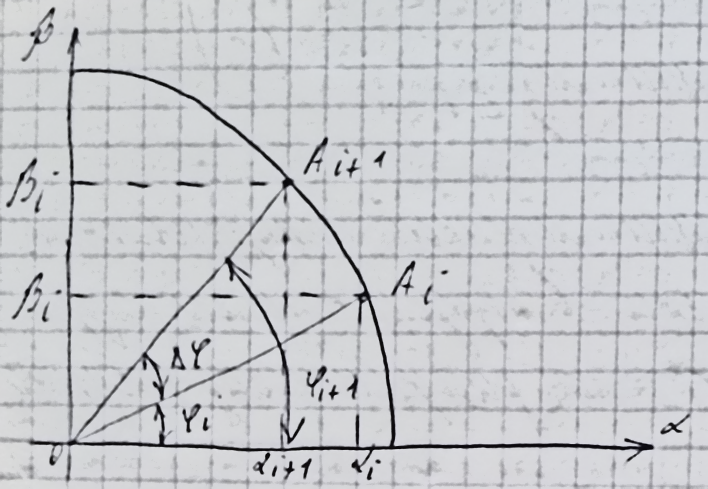 Вычисление такой системы затруднительно, и поэтому пользуются следующими выражениями:
Вычисление такой системы затруднительно, и поэтому пользуются следующими выражениями:

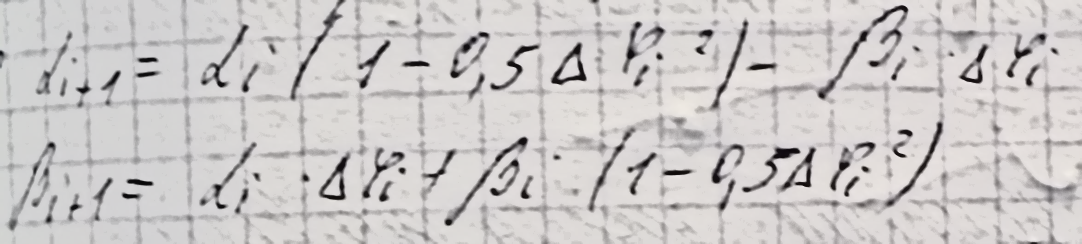 C учётом всех преобразований получают выражения в координатах
C учётом всех преобразований получают выражения в координатах  ,
,  :
: :
: