|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Перетворення Лапласа. Передавальна функція лінійної стаціонарної одновимірної системи керуванняОсновний зміст інтегральних перетворень, в тому числі й перетворення Лапласа, – це взаємно-однозначний перехід від одного класу функцій (функцій Означення 3.1Оригіналом (за Лапласом) називається функція 1) 2) 3) існують такі числа
(точна нижня межа Означення 3.2 (зображення за Лапласом). Зображенням функції-оригінала
Наведемо без доведення наступні теореми. Теорема 3.1 Якщо функція Теорема 3.2 Якщо функція
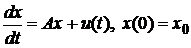
де інтегрування проводиться вздовж прямої, яка паралельна до уявної осі, на віддалі  Розглянемо тепер лінійну систему керування зі сталими коефіцієнтами, яка описується рівнянням
і до моменту
Припустимо, що функції
де
Запровадимо позначення
Тоді рівність (3.5) можна записати у вигляді
Або Функція Функції від матриць. Подання розв’язку стаціон. і нестаціон. лінійних систем керування через фундаментальний р – ок.
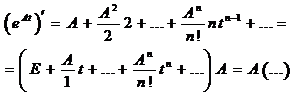
Лема: Ряд (2)збіг. абсолютно при кожному фікс. tдля дов. квадратної матр. А з дійсними або комплексними елементами і рівномірно на будь-якому скінченому інтервалі. Теорема: Якщо матриця
має вигляд
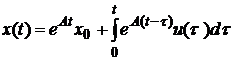
Твердження1: Розглянемо таку задачу
Розв’язком є вектор Теорема 4.3 Якщо матриця
має вигляд
Доведення цієї теореми одержується безпосередньою перевіркою. В рівності (10) покладемо всі компоненти вектора
|
||
|
|
Последнее изменение этой страницы: 2018-05-27; просмотров: 296. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 – класу оригіналів) до іншого класу функцій (наприклад, до
– класу оригіналів) до іншого класу функцій (наприклад, до  , який називається класом зображень). Уновому класі суттєво змінюється природа математичних операцій. А саме, інтегрування диференціального рівняння в класі оригіналів може звестися до відшукання коренів алгебраїчного рівняння в класі зображень. Такий перехід забезпечує спрощення відшукання розв’язку початкової задачі.
, який називається класом зображень). Уновому класі суттєво змінюється природа математичних операцій. А саме, інтегрування диференціального рівняння в класі оригіналів може звестися до відшукання коренів алгебраїчного рівняння в класі зображень. Такий перехід забезпечує спрощення відшукання розв’язку початкової задачі. (нас цікавитимуть тільки дійсні функції) дійсного аргументу
(нас цікавитимуть тільки дійсні функції) дійсного аргументу  , яка задовольняє умови:
, яка задовольняє умови: -го порядку на всій числовій осі
-го порядку на всій числовій осі  при
при  ;
; і
і  , що для
, що для 

 чисел
чисел  називається показником росту функції
називається показником росту функції  комплексної змінної
комплексної змінної  , яка визначається за допомогою інтеграла Лапласа
, яка визначається за допомогою інтеграла Лапласа . (3.1)
. (3.1) , то інтеграл
, то інтеграл  , в цій півплощині інтеграл є аналітичною функцією і в цій області
, в цій півплощині інтеграл є аналітичною функцією і в цій області  .
. збігається, то функція
збігається, то функція  , (3.2)
, (3.2) від неї.
від неї. (3.3)
(3.3) подачі сигналу керування ця система знаходиться в спокої, тобто
подачі сигналу керування ця система знаходиться в спокої, тобто ,
,  . (3.4)
. (3.4) задовольняють умови оригінала. Застосуємо до рівняння (3.3) перетворення Лапласа (3.1). Враховуючи умови (3.4), знайдемо
задовольняють умови оригінала. Застосуємо до рівняння (3.3) перетворення Лапласа (3.1). Враховуючи умови (3.4), знайдемо , (3.5)
, (3.5) ,
,  .
. ,
,  ,
, . (3.6)
. (3.6) ,(3.7)
,(3.7) . (3.8)
. (3.8) називається передавальною функцією системи.
називається передавальною функцією системи. (1)- нестац. лін.система x(t) є R
(1)- нестац. лін.система x(t) є R  , x є R
, x є R  ,
,  ,
,  – відомі.
– відомі. (1.1)– стаціон. лін.система.
(1.1)– стаціон. лін.система. (2)
(2)
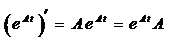 (3)
(3) задовольняє умови леми 4.1, то розв’язок матричної задачі Коші
задовольняє умови леми 4.1, то розв’язок матричної задачі Коші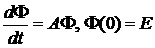 (4)
(4) (5)
(5) (7),
(7),  (8)
(8) .
. (9)
(9) . (10)
. (10) (
(  ), яку візьмемо рівною одиничному імпульсу
), яку візьмемо рівною одиничному імпульсу  , зосередженому в точці
, зосередженому в точці  . Позначимо
. Позначимо  розв’язок рівняння (0) за умови
розв’язок рівняння (0) за умови  . Одержимо
. Одержимо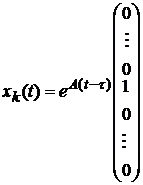 –
–  -й рядок.
-й рядок.