|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
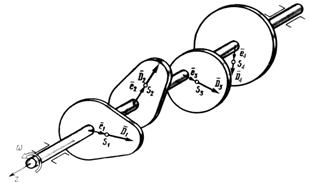
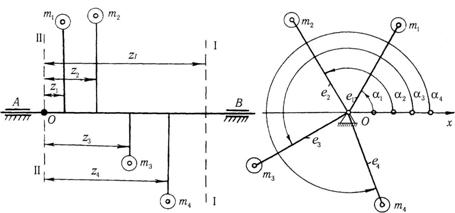
Динамічне балансування роторів при проектуванніЗадачею динамічного балансування ротора є не тільки зведення центра мас до осі обертання, але й забезпечення співпадання головної центральної осі інерції ротора з віссю обертання. Нехай ротор становить сукупність кількох мас (деталей), які обертаються як одне ціле. При цьому маси та координати центрів мас усіх деталей відомі (рис. 6.7). Зазначимо, що можна було б кожну з мас зрівноважувати окремо за методикою статичного зрівноваження. Однак цей шлях є недоцільним, оскільки у таких системах майже завжди має місце часткове взаємне зрівноваження дисбалансів. Таким чином, розглянемо ротор, що становить чотири незрівноважених маси, розміщені у площинах, перпендикулярних до осі обертання. Координати центрів мас у цих площинах визначаються радіус-векторами
Рис. 4.7
Динамічного зрівноваження можна досягти за допомогою, як мінімум, двох противаг, які встановлюють у двох різних площинах. Для цього оберемо дві площини зведення (І та ІІ), які перпендикулярні до осі обертання (рис. 6.8, а). Позначимо маси цих противаг
а б
в г Рис. 6.8
Тоді умови динамічного зрівноваження робота можуть бути записані наступним чином
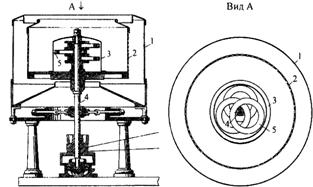
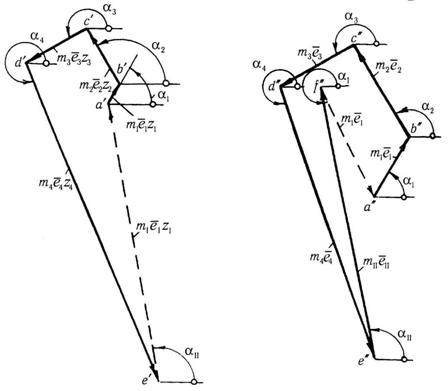
При аналітичному розв’язуванні цієї задачі систему (5), (6) проектуються на осі координат. З рівняння проекцій знаходять невідомі параметри. Зручнішим та наочнішим є графічний спосіб розв’язування цих рівнянь. Визначення величини і розміщення противаг у такий спосіб досягається побудовою векторних багатокутників.  Спочатку будуємо векторний багатокутник згідно з рівнянням (6). При цьому вектори динамічного дисбалансу У вибраному масштабі, будують п’ятикутник, який складається з відомих векторів З отриманого вектора Потім будуємо векторний багатокутник за рівнянням (5). У цьому многокутнику невідомою величиною буде замикаючий вектор, модуль якого дорівнює добутку Статичне та динамічне балансування виготовлених роторів.Повністю збалансований при проектуванні ротор після виготовлення має, тим не менше, деяку незрівноваженість. Усі ротори, що швидко обертаються, перевіряють експериментально на спеціальних балансувальних машинах. Конструкція їх досить різноманітна, але в основу дії більшості з них покладено встановлення ротора на пружну основу (рис. 6.9), при цьому ротору надають швидкості близької до резонансної. Тоді незрівноважені сили створюють значні амплітуди коливань, які реєструють спеціальні пристрої, що дозволяють визначити місця, в яких треба встановити зрівноважувальні маси.
Рис. 6.9 Зрівноваження роторів автобалансувальними пристроями. якщо дисбаланс ротора й зв’язаних з ним мас змінюється у процесі експлуатації (пральні машини, центрифуги) або якщо необхідно підвищити точність зрівноваження, ротор зрівноважують під час роботи. Для цього використовують автобалансувальні пристрої, автобалансири (АБП). Їх розміщують усередині ротора, або насаджують на нього. Зрівноваження ротора здійснюється переміщенням коригувальних вантажів.
Рис. 6.10
АПБ бувають активні та пасивні. Активні АБП працюють при будь-яких швидкостях. Але вони мають складну конструкцію: необхідна наявність механізмів примусового переміщення коригувальних вантажів, датчиків і т.п. Пасивні АБП працюють на закритичних швидкостях обертання ротора, мають відносно просту конструкцію. Їхня робота ґрунтується на явищі самоцентрування – на закритичних швидкостях обертання пружно закріпленого твердого ротора, його головна центральна вісь інерції прямує до осі обертання, причому тим більше, чим вища швидкість обертання. АБП бувають з твердими коригувальними вантажами (рис. 6.10) та рідинні, у яких коригувальним вантажем є рідина. |
||
|
|
Последнее изменение этой страницы: 2018-06-01; просмотров: 361. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 .
.
 і
і  , а радіус-вектори, що визначають координати центрів мас щодо осі обертання,
, а радіус-вектори, що визначають координати центрів мас щодо осі обертання,  ,
,  .
.
 (5)
(5) . (6)
. (6) зручно повернути на
зручно повернути на  так, щоб вони збігалися з напрямками відповідних сил інерції.
так, щоб вони збігалися з напрямками відповідних сил інерції. ,
,  ,
,  ,
,  , та невідомого вектора
, та невідомого вектора  , що замкне побудову (рис. 6.8, в).
, що замкне побудову (рис. 6.8, в). противаги визначають кутом
противаги визначають кутом  , який вимірюють безпосередньо на креслені.
, який вимірюють безпосередньо на креслені. . Задавши один із співмножників у цьому добутку, знайдемо другий. Кут
. Задавши один із співмножників у цьому добутку, знайдемо другий. Кут  , який визначає напрямок радіуса-вектора противаги, знайдемо з рисунка 6.8, г.
, який визначає напрямок радіуса-вектора противаги, знайдемо з рисунка 6.8, г.