|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
СТАТИЧЕСКИЙ РАСЧЁТ КУНСТРУКЦИЙ
Равновесие составных тел При решении задач об определении опорных реакций может оказаться, что из составленных условий равновесия невозможно определить все неизвестные величины, так как их число больше числа уравнений, в которые эти неизвестные входят. Подобное может произойти по двум основным причинам. Во-первых, на рассматриваемое тело могут быть наложены лишние связи, ненужные для обеспечения равновесия абсолютно твёрдого тела, но необходимые для предотвращения недопустимо больших деформаций. В этом случае задача определения реакций опор является статически неопределимой в том смысле, что невозможно определить реакции связей без учёта деформаций тела, т.е. оставаясь в рамках модели абсолютно твёрдого тела. Такие задачи в теоретической механике не рассматриваются. Во-вторых, в качестве тела, равновесие которого рассматривается, может быть выбрана конструкция, состоящая из двух или более тел, соединённых между собой внутренними связями. На такую конструкцию заведомо приходится накладывать дополнительные связи, обеспечивающие равновесие конструкции. Основная особенность решения таких задач состоит в том, что необходимо рассматривать равновесие нескольких тел данной конструкции. Рассмотрим, например, трёх шарнирную арку
Хотя такая арка не является абсолютно твёрдым телом, заранее известно, что она покоится и, следовательно, приложенные к ней силы удовлетворяют условиям равновесия. Наличие шарнира  Для стержня неизвестных. Можно рассмотреть равновесие правого стержня
Универсальный метод решения подобных задач состоит в том, что конструкция разбивается на отдельные абсолютно твёрдые тела и рассматривается равновесие каждого из этих тел. Однако, во многих случаях такой подход оказывается нерациональным, поскольку приводит к необходимости решения системы уравнений, каждое из которых может содержать несколько неизвестных. Причём в уравнения может входить значительное число лишних неизвестных, которые не требуется определять по условиям решаемой задачи. Приобретя определённые навыки, можно поставить целью поиск наиболее рационального способа решения задачи, в основе которого лежит идея использования минимального числа уравнений, каждое из которых, по возможности, содержит только одну неизвестную. В заключение подчеркнём ещё раз – необходимо рисовать отдельную силовую схему для каждого тела, равновесие которого рассматривается.
Пример 2.1.
Стержневая конструкция нагружена силами Дано:
Нужно определить шесть составляющих реакций шарниров. Для получения необходимых для этого шести уравнений можно рассмотреть равновесие всей конструкции и одного из стержней или равновесие каждого из стержней. С точки зрения удобства вычисления плеч сил, предпочтительнее рассмотреть равновесие каждого из стержней. Рассмотрим равновесие стержня
Нетрудно видеть, что только последнее уравнение
Однако, если составить уравнение
то сразу определяется вторая неизвестная
Надобность в уравнении Рассмотрим равновесие стержня
Отсюда Теперь можно использовать уравнение (
Отсюда: Пример 2.2.
Однородные балки
Поскольку по условию задачи не требуется определять усилия во внутреннем шарнире
Только уравнение (
Отсюда: Из уравнений ( Пример 2.3.
Однородный стержень
Особенностью задачи является то обстоятельство, что требуется определить только одну неизвестную Рассмотрим равновесие стержня
Величину
Таким образом,
Рассмотрим равновесие стержня
или так как
Исключая из уравнений ( Интерес представляет решение
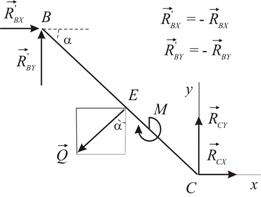
Пример 2.4. Стержень
Рассмотрим равновесие всей конструкции. Внешними опорами для
причём,
Полученные три уравнения содержат четыре неизвестные. Это объясняется тем, что условия, являющиеся достаточными для равновесия абсолютно твёрдого тела, использованы для тела деформируемого, для которого они являются только необходимыми. Для получения достаточного количества уравнений рассмотрим равновесие одной из частей конструкции, например, левого стержня Условия равновесия имеют вид:
Решая полученную систему уравнений, находим все неизвестные. Подобная схема решения применима для любых задач о равновесии сочленённых тел. Нетрудно, однако, заметить, что решение полученной системы уравнений связано с определёнными трудностями, поскольку в большинстве уравнений содержится более одной неизвестной. Приобретя определённые навыки в составлении уравнений равновесия, можно поставить задачу составления в каждом конкретном случае наиболее просто решаемой системы уравнений. Обратимся к разобранному примеру. Можно предложить следующую схему решения задачи. Тело Отсюда:
Тело
Отсюда:
Тело
Отсюда: Как видно, таким способом мы можем последовательно определить все неизвестные.
ЗАДАЧИ, РЕКОМЕНДУЕМЫЕ ДЛЯ РАЗБОРА В АУДИТОРИИ И ДЛЯ ЗАДАНИЯ НА ДОМ:
Из сборника задач И.В.Мещерского: 4.32; 4.35; 4.36; 4.37; 4.38; 4.41; 4.42; 4.43; 4.44; 4.53; 4.54; 4.55; 4.56.
Из учебника «ТЕОРЕТИЧЕСКАЯ МЕХАНИКА - теория и практика»: комплекты СР-5; СР-6; СР-7.
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 6
Расчёт ферм
Особое место в ряду статических задач занимает расчёт ферм. Фермой называется жёсткая конструкция из прямолинейных стержней. Если все стержни фермы и вся приложенная к ней нагрузка расположены в одной плоскости, ферма называется плоской. В дальнейшем будем рассматривать только плоские фермы. Соединения стержней называются узлами фермы. В результате полного расчёта фермы необходимо определить реакции опор и усилия во всех стержнях фермы. При расчёте ферм приложенную внешнюю нагрузку (включая весовую нагрузку) заменяют эквивалентной системой, силы которой приложены к узлам фермы. В реальных фермах соединения стержней, как правило, жёсткие (сварка, клёпка и т.д.), так что они не допускают относительного поворота стержней. В расчётной схеме крепления стержней считаются шарнирными, причём, трение в шарнирах считается пренебрежимо малым. В результате сделанных упрощающих предположений оказывается, что каждый стержень находится в равновесии под действием двух сил, приложенных к его концам. Эти силы должны иметь общую линию действия, т.е. они направлены вдоль стержня. Таким образом, считается, что каждый стержень фермы работает или на растяжение, или на сжатие, но не может испытывать кручения или изгиба. Усилие в стержне считается положительным, если он растянут. Для определения усилий в стержнях фермы используются два основных метода.
Пример Рассчитать ферму, изображённую на Рис. 2.18. Дано:
Прежде всего обозначим все узлы и все стержни фермы. Определим реакции опор. Для этого рассмотрим равновесие фермы в целом (Рис. 2.19). Составим условия равновесия:
Отсюда:
Поскольку вычисленные величины опорных реакций определяют весь дальнейший расчёт, имеет смысл проверить полученные результаты, составив, например, уравнение моментов относительно оси
Для определения усилий в стержнях фермы используются два основных метода.
Метод вырезания узлов. Метод состоит в том, что рассматривается равновесие каждого узла фермы в определённой последовательности. На узел действует плоская система сходящихся сил, для которой можно составить два уравнения равновесия, что позволяет определить две неизвестные. Поэтому расчёт начинают с узла, соединяющего два стержня фермы. Затем переходят к соседним узлам в определённой последовательности, которая позволяет на каждом шаге определять усилия в очередных двух стержнях. Первоначально предполагается, что стержни растянуты, т.е. их реакции направлены от узлов. Если усилие в каком-либо стержне оказывается отрицательным, то это означает, что данный стержень сжат. Заметим, что уравнения равновесия фермы в целом являются прямым следствием полной системы уравнений равновесия узлов, так что методом вырезания узлов можно определить в том числе и реакции опор фермы. Но в этом случае часто приходится совместно решать систему, содержащую значительное число уравнений. Предварительное определение реакций опор упрощает решение задачи, а неиспользованные уравнения равновесия узлов можно рассматривать как проверочные.
Рассмотрим равновесие узла
Отсюда:
Рассмотрим равновесие узла
Отсюда:
Рассмотрим равновесие узла
Значения тригонометрических функций определим из треугольника
Таким образом,
Рассмотрим равновесие узла
Отсюда:
Отсюда:
Рассмотрим равновесие узла
Отсюда:
Таким образом, определены усилия во всех стержнях фермы. Оставшиеся уравнения используем для проверки полученных результатов.
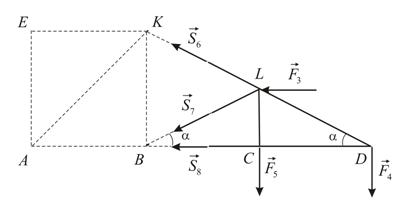
Метод сквозных сечений (метод Риттера). Этим методом удобно пользоваться для определения усилий в отдельных стержнях фермы, в частности для проверочных расчётов. Идея метода состоит в том, что ферма разделяется сечением на две части и рассматривается равновесие одной из этих частей. Сечение проводится по трём стержням фермы, в которых (или в одном из которых) требуется определить усилие. Действие отброшенной части фермы заменяют соответствующими реакциями, направляя их вдоль разрезанных стержней от узлов, т.е. считая стержни растянутыми (как и в методе вырезания узлов). Условия равновесия составляются так, чтобы в каждое уравнение входила только одна неизвестная величина. Если сечение проводится более, чем по трём стержням, то усилия в "лишних" стержнях должны быть определены предварительно. В противном случае будет необходимо рассмотреть комбинацию из нескольких сечений или комбинацию метода сечений и метода вырезания узлов. В качестве примера проведём сечение через шестой, седьмой и восьмой стержни. Рассмотрим равновесие правой части фермы (Рис. 2.20). Уравнения равновесия имеют вид:
Отсюда:
Условие жёсткости фермы. Найдём минимальное число стержней Условие статической определимости фермы. Ферма является статически определимой, если число неизвестных совпадает с числом независимых уравнений равновесия, в которые эти неизвестные входят. Для плоской фермы, имеющей Методы расчёта фермы рассмотрим на примере.
ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ:
ЗАДАЧИ, РЕКОМЕНДУЕМЫЕ ДЛЯ РАЗБОРА В АУДИТОРИИ И ДЛЯ ЗАДАНИЯ НА ДОМ:
Из сборника задач И.В.Мещерского: 4.66; 4.67; 4.68; 4.70; 4.71; 4.73; 4.74.
Из учебника «ТЕОРЕТИЧЕСКАЯ МЕХАНИКА - теория и практика»: комплекты СР-8; СР-9; СР-10; СР-11.
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 7
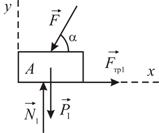
СИЛА ТРЕНИЯ
Свойства силы трения устанавливаются по результатам следующего эксперимента. На горизонтальной поверхности находится тело, к которому приложены две активные силы: нормальная к поверхности сила Установленные в результате обработки описанного эксперимента закономерности сводятся к следующим положениям (законы Амантона-Кулона).
Сила трения действует в общей касательной плоскости к поверхностям соприкасающихся тел и противоположна тому направлению, в котором активно действующие силы стремятся сдвинуть тело. 2. Модуль силы трения при покое принимает всякий раз значение, необходимое для предотвращения проскальзывания тела по поверхности, но не может превзойти некоторого предельного значения, которое достигается на грани перехода тела от состояния покоя к состоянию скольжения: 3. Максимальное значение силы трения при покое пропорционально нормальному давлению тела на поверхность: 4. При скольжении тела по шероховатой поверхности сила трения пропорциональна силе нормальной реакции поверхности:
Пример 3.1.
Установить, будет ли находиться в покое тело, изображённое на Рис. 3.1, если
Предположим, что тело находится в покое; тогда уравнения равновесия имеют вид:
Отсюда: Вычислим максимально возможную силу трения: В рассматриваемом случае вычисленная из уравнений равновесия сила трения оказалась меньше максимально возможной, следовательно, условие равновесия Пример 3.2. Сохраняя условия предыдущего примера, положим
Аналогично примеру 3.1, вычисляем
Пример 3.3 Однородный стержень
При потере равновесия возможно скольжение точки
При потере равновесия При определении
Таким образом, равновесие стержня
Пример 3.4 На верхней грани прямоугольного бруса
Предположим, что верхний брус
Отсюда: Вычислим максимальную силу трения:
Как видно, сила трения, найденная из уравнений равновесия, т.е. необходимая для обеспечения равновесия тела, меньше максимально возможной силы трения. Следовательно, условие равновесия
Предположим теперь, что брус
Отсюда, учитывая, что
Максимально возможная сила трения равна: Как видно, сила трения, найденная из уравнений равновесия, т.е. необходимая для обеспечения равновесия тела, меньше максимально возможной силы трения. Следовательно, условие равновесия Пример 3.5 На верхней грани прямоугольного бруса Как видно, по сравнению с предыдущим примером изменился коэффициент трения между телами Теперь сила трения, необходимая для обеспечения покоя тела
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 858. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 , нагруженную активными силами
, нагруженную активными силами  и
и  (Рис. 2.1). Можно рассмотреть равновесие арки в целом. Тогда в систему внешних сил войдут заданные силы
(Рис. 2.1). Можно рассмотреть равновесие арки в целом. Тогда в систему внешних сил войдут заданные силы  и
и  . Соответствующая силовая схема представлена на Рис. 2.2.
. Соответствующая силовая схема представлена на Рис. 2.2.

 позволяет двум частям арки поворачиваться друг относительно друга. Для предотвращения такого поворота приходится усиливать одну из опор, например, ставить в точке
позволяет двум частям арки поворачиваться друг относительно друга. Для предотвращения такого поворота приходится усиливать одну из опор, например, ставить в точке  . Трёх уравнений равновесия недостаточно для определения четырёх неизвестных. Поэтому приходится рассматривать равновесие ещё какой-либо части конструкции, например, стержня
. Трёх уравнений равновесия недостаточно для определения четырёх неизвестных. Поэтому приходится рассматривать равновесие ещё какой-либо части конструкции, например, стержня  .
. , образуют систему шести уравнений, содержащих шесть
, образуют систему шести уравнений, содержащих шесть (Рис. 2.4). При этом следует учитывать, что силы взаимодействия в шарнире
(Рис. 2.4). При этом следует учитывать, что силы взаимодействия в шарнире  ;
;  . Для решения поставленной задачи достаточно рассмотреть равновесие только двух из трёх тел в любой комбинации. Условия равновесия третьего тела могут быть использованы для проверки полученных результатов.
. Для решения поставленной задачи достаточно рассмотреть равновесие только двух из трёх тел в любой комбинации. Условия равновесия третьего тела могут быть использованы для проверки полученных результатов.


 ( Рис. 2.5).
( Рис. 2.5). м;
м;  кН;
кН;  кН;
кН;  кН м;
кН м;  . Определить усилия в шарнирах
. Определить усилия в шарнирах 
 . Силовая схема представлена на Рис. 2.7. Можно составить "стандартную" систему уравнений равновесия:
. Силовая схема представлена на Рис. 2.7. Можно составить "стандартную" систему уравнений равновесия:









 кН
кН

 кН
кН .
. ;
;  .) Силовая схема представлена на Рис.4.7. Прежде всего, определим
.) Силовая схема представлена на Рис.4.7. Прежде всего, определим  . Для этого составим уравнение
. Для этого составим уравнение

 кН.
кН. ):
):  кН Для определения оставшихся неизвестных используем уравнения
кН Для определения оставшихся неизвестных используем уравнения

 кН;
кН;  кН.
кН.
 и
и  соединены между собой шарниром
соединены между собой шарниром  м;
м;  м;
м;  H;
H;  H. Определить реакции опорных стен.
H. Определить реакции опорных стен. (
(  (
(  )
) (
(  )
)

 Н. Для вычисления других неизвестных необходимо определить
Н. Для вычисления других неизвестных необходимо определить  . Рассмотрим равновесие
. Рассмотрим равновесие 
 Н.
Н. Н;
Н;  Нм.
Нм.
 , который может вращаться вокруг оси
, который может вращаться вокруг оси  , проходящей через его середину (Рис. 2.11). Точки
, проходящей через его середину (Рис. 2.11). Точки  лежат на одной вертикали.
лежат на одной вертикали. 
 В точке
В точке  подвешен груз
подвешен груз  Определить угол
Определить угол  , образуемый стержнем
, образуемый стержнем  :
:
 :
:
 (
( 


 (
( 
 или
или 

 и сила
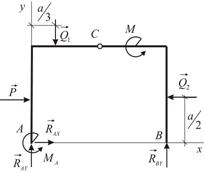
и сила  и пара сил с моментом
и пара сил с моментом  . Размеры указаны на чертеже (Рис. 2.14). Определить реакции опор.
. Размеры указаны на чертеже (Рис. 2.14). Определить реакции опор. и
и  . Силовая схема представлена на Рис. 2.15. Условия равновесия имеют вид:
. Силовая схема представлена на Рис. 2.15. Условия равновесия имеют вид:


 и
и 







 ;
;  , получаем:
, получаем:





 кН;
кН;  м.
м.






 (чтобы в это уравнение вошли все вычисленные величины):
(чтобы в это уравнение вошли все вычисленные величины):



 (стержень сжат)
(стержень сжат) (стержень сжат).
(стержень сжат).


 (стержень растянут)
(стержень растянут) (стержень сжат).
(стержень сжат).



 :
:

 (стержень растянут)
(стержень растянут) (стержень сжат).
(стержень сжат).


 (стержень сжат).
(стержень сжат). (стержень сжат).
(стержень сжат). Рассмотрим равновесие узла
Рассмотрим равновесие узла 

 (стержень растянут)
(стержень растянут) (стержень сжат).
(стержень сжат).


 (стержень растянут)
(стержень растянут)
 Рассмотрим равновесие узла
Рассмотрим равновесие узла 







 , которое необходимо для образования плоской фермы, имеющей
, которое необходимо для образования плоской фермы, имеющей  узлов. Простейшая ячейка фермы (треугольник) имеет три стержня и три узла. Для присоединения каждого из оставшихся
узлов. Простейшая ячейка фермы (треугольник) имеет три стержня и три узла. Для присоединения каждого из оставшихся  узлов необходимо два стержня. Таким образом, условие жёсткости фермы имеет вид:
узлов необходимо два стержня. Таким образом, условие жёсткости фермы имеет вид: 
 уравнений равновесия, три из которых расходуются на определение трёх составляющих реакций опор. Для определения усилий в стержнях фермы остаётся
уравнений равновесия, три из которых расходуются на определение трёх составляющих реакций опор. Для определения усилий в стержнях фермы остаётся  уравнения. Таким образом, условие статической определимости фермы совпадает с условием её жёсткости.
уравнения. Таким образом, условие статической определимости фермы совпадает с условием её жёсткости.
 и сила трения
и сила трения  .
.
 , где
, где  – коэффициент трения при покое, который определяется экспериментально. Коэффициент
– коэффициент трения при покое, который определяется экспериментально. Коэффициент  и направлена в сторону, противоположную скольжению. Динамический коэффициент трения
и направлена в сторону, противоположную скольжению. Динамический коэффициент трения  (коэффициент трения скольжения), помимо прочего, может зависеть от относительной скорости скольжения.
(коэффициент трения скольжения), помимо прочего, может зависеть от относительной скорости скольжения. Н;
Н;  Н;
Н; 


 Н;
Н;  Н.
Н. Н.
Н. выполнено и тело находится в покое и
выполнено и тело находится в покое и  Н.
Н. Н.
Н. Н;
Н;  , тело придёт в движение, а сила трения примет максимальное значение:
, тело придёт в движение, а сила трения примет максимальное значение:  Н.
Н. (Рис. 3.2). Вес стержня
(Рис. 3.2). Вес стержня 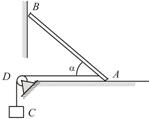




 Разрешим полученную систему уравнений относительно
Разрешим полученную систему уравнений относительно  . Учитывая, что
. Учитывая, что  , находим:
, находим:  .
. заметим, что при потере равновесия точка
заметим, что при потере равновесия точка 

 , находится прямоугольный брус
, находится прямоугольный брус  . Брус
. Брус  (Рис. 3.4). Коэффициент трения между телами
(Рис. 3.4). Коэффициент трения между телами  . На брус
. На брус  , образующая с горизонтом угол
, образующая с горизонтом угол  . Будет ли брус
. Будет ли брус 





 выполнено, тело
выполнено, тело 


 и
и  , получаем:
, получаем: 


 выполнено, тело
выполнено, тело 
 . На брус
. На брус  а максимально возможная сила трения оказывается равной
а максимально возможная сила трения оказывается равной