|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Линейные измерения в полигонометрии.Линейные измерения в полигонометрии выпол-ся IV класс 2 приемами. Под приемом понимается 2 наведения на отражатель по 3 точных отсчета в каждом наведении. 1 разряд – 2 наведения; 2 разряд – 1 наведение.
19. Предварительные вычисления в полигонометрии.
1) Вычисление угловой невязки: fβ= 2) Пред fβ=2mβ 3) Если условия не выполнены то углы перемеряют. Если выполняется данное условие, то делают вывод о соотв-ии измер. углов по точности данному классу или разряду. Перед уравниванием по методу МНК в полонометр ходе угловую невязку не распределяют в виде поправок в углы. Углы уравнивают на заключ этапе уравнив хода. Вычисление дирекционных углов сторон хода. Дирекц углы вычисляют по неисправленным значениям измер углов. Для левых измер углов поворота использ след формулы: α1= αнач+β1-180˚; α2= α1+β2-180˚; αi+1=αi+βi+1-180˚(для левых углов); αi+1= αi- βi+1+180˚(для правых углв). Контроль при вычисл углов вычисл след равенством: αнач,вычс-αкон,исх=fβ Вычисление приращения координат: ∆x=Si*cos αi ; ∆y=Si*sin αi Вычисление невязок по осям координат: f’∆x=[∆x]-[ ∆x]теор; f’∆y=[∆y]-[ ∆y]теор; [ ∆x]теор=xкон-xнач; [ ∆y]теор=yкон-yнач Вычисление линейной абсолютной невязки: fs=  M-ср квад ошибка положения пункта в слабом месте хода после уравнивания Для вытянутого хода M2=n*m2s+m2β/ро2*L2*n+1,5/3 Для изогнутого хода M2=n*m2s+ m2β/ро2[D2n+1, i] ms-СКО измер линий; mβ-СКО измер угла; L-длина замкнут хода; n –число сторон; ро”=206265”; [D2n+1, i]- сумма квадр расстояний от конечного пункта хода до каждого Вычисл относит невязку хода: fs<=2M – не явл основным. fs IVкласс 1/T=1/25000 1разряд 1/Т=1/5000 2разряд 1/Т=1/10000 Если числоне выполнено, то линии в ходе измеряют заново, а если условие выполнено делают выводы о соотв-ии измерений линий по точности и переходят к вычисл поправок.
20. Ошибки угловых измерений — случайные и систематические - делят на три группы: личные, приборные и из-за влияния внешней среды. Наиболее трудно устранить систематические ошибки, поэтому их необходимо тщательно изучать и сводить к минимуму путем введения поправок или соответствующей организации измерений. Влияние случайных ошибок ослабляют, увеличивая число приемов измерений до определенной величины. Личные ошибки измерений возникают из-за несовершенства системы наблюдатель — прибор. К личным можно отнести случайные и систематические ошибки визирования, случайные ошибки совмещения изображений штрихов лимба и отсчитывания по шкале оптического микрометра; систематические ошибки из-за неодинаковой освещенности штрихов лимба, ошибки отсчета по накладному уровню, позволяющему определять поправки в направлении за наклон вертикальной оси теодолита. Приборные ошибки возникают из-за неточного изготовления узлов и деталей теодолита, остаточных погрешностей его регулировки и юстировки « т. п. К приборным относят ошибки из-за различия номинальной и фактической цен делений окулярного и отсчетного микрометров, погрешности хода фокусирующей линзы зрительной трубы, эксцентриситет лимба и алидады, ошибки диаметров лимба, коллимационные ошибки, ошибки из-за наклона оси вращения трубы, вертикальной оси теодолита, лимба, ошибки вследствие температурных деформаций узлов теодолита и др. Ошибки из-за влияния внешней среды являются наиболее существенным источником систематических ошибок при угловых измерениях. В первую очередь к ним относят оптическую рефракцию, которая, если не принять мер по ее учету, лимитирует дальнейшее повышение точности угловых измерений. К этой группе относят ошибки из-за кручения и гнутия геодезических сигналов и др. |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 645. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
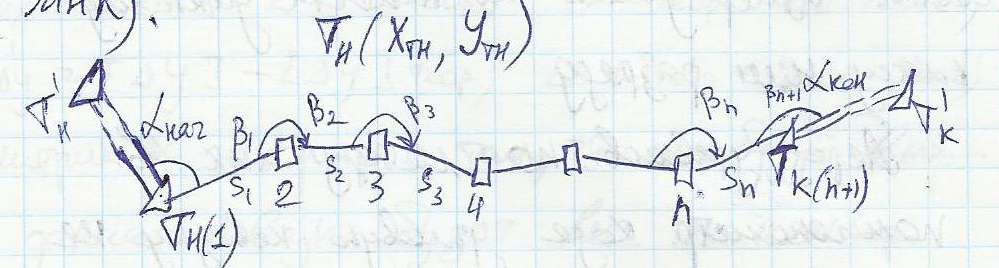 Цель данных вычислений:1) оценить качество и точность выполненных измерений углов и линий;2) вычислить приближенные(рабочие) координаты пунктов хода полигом хода;3) подготовить результаты измерений к уравниванию строгим способом;
Цель данных вычислений:1) оценить качество и точность выполненных измерений углов и линий;2) вычислить приближенные(рабочие) координаты пунктов хода полигом хода;3) подготовить результаты измерений к уравниванию строгим способом; - (αкон-αнач) -180˚(n+1); (αкон-αнач) -180˚(n+1) -
- (αкон-αнач) -180˚(n+1); (αкон-αнач) -180˚(n+1) - 
 ; IV - mβ=3”; 1разр- mβ=5”; 2разр- mβ=10”; fβ<=fβпред- если не выполняется начинаем измерения заново
; IV - mβ=3”; 1разр- mβ=5”; 2разр- mβ=10”; fβ<=fβпред- если не выполняется начинаем измерения заново . Линейную невязку сравнивают с допуском fs<=2M
. Линейную невязку сравнивают с допуском fs<=2M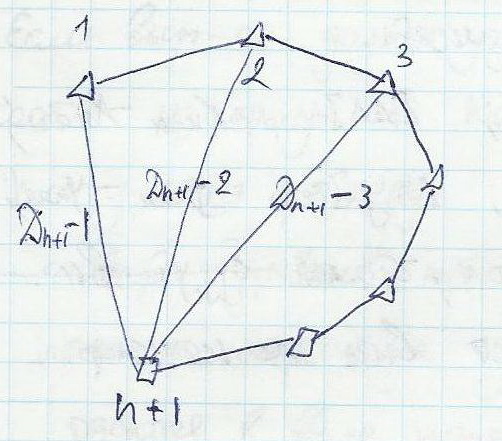 /[S]=1/число<=1/T
/[S]=1/число<=1/T