|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
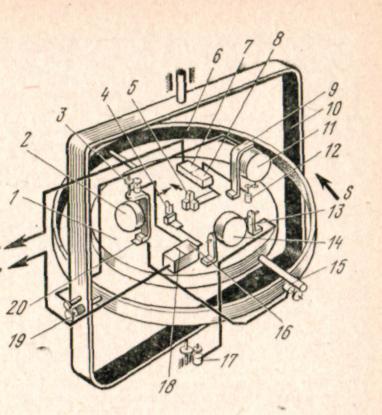
Таким образом, гироблок непосредственно задает положение осей навигационной системы координат. Рис.1. Кинематическая схема гиростабилизированной платформы инерциальной системы: 1-платформа; 2,11,14- гироскопы; 3,12 – коррекционные двигатели; 4,5 – акселерометры; 6 – внутренняя рама карданова подвеса; 7,18 – вторые интеграторы; 8, 16 – первые интеграторы; 9,13,20 – датчики сигналов системы разгрузки; 10 – внешняя рама карданова подвеса; 15,17,19 – двигатели разгрузки (стабилизации). Рис. 2. Установка двух акселерометров на гироплатформе
(1)
По требованиям точности ИНС ошибка в горизонтировании платформы не должна превышать нескольких угловых минут. Реализовать такое требование с помощью системы маятниковой коррекции не представляется возможным. Поэтому в ИНС для горизонтирования платформы применяется интегральная коррекция, обеспечивающая необходимую точность. Принцип действия интегральной коррекции рассмотрим на примере одноосного гиростабилизатора (рис. 3).
Рис. 3. Принцип интегральной коррекции
Пусть платформа с акселерометром Ах выставлена в начальный момент времени to горизонтально (точнее говоря, нормально вектору

Если управлять разворотом платформы за счет прецессии гироскопа, то необходимо обеспечить скорость его прецессии wг(t), равную скорости поворота платформы:
Для скорости прецессии гироскопа справедливо соотношение wг(t) = Mк(t)/H
где МK(t) - коррекционный момент, прикладываемый к гироскопу для обеспечения его прецессии; H - кинетический момент гироскопа. Для выполнения равенства (3) необходимо, чтобы коррекционный момент был пропорционален скорости перемещения платформы, т.е.
МK(t)=kVx(t)или wг(t) = kVx(t)/H (4)
,где k - постоянная величина, характеризующая коэффициенты усиления системы. Подставляя в условие (3) соотношения (4) и (2), получим условие соотношение: K/H = 1/R ,которое называется условием невозмущаемости гировертикали. Вывод: Параметры системы выбираются такими, чтобы они представляли собой невозмущаемую гировертикаль с периодом колебаний Т=84,4 мин.
|
||
|
|
Последнее изменение этой страницы: 2018-05-31; просмотров: 383. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

 Если платформа установлена в горизонте неточно, например развернута на угол α вокруг оси Оу и на угол β вокруг оси Ох, то в измерение составляющих вектора скорости будет вноситься ошибка:
Если платформа установлена в горизонте неточно, например развернута на угол α вокруг оси Оу и на угол β вокруг оси Ох, то в измерение составляющих вектора скорости будет вноситься ошибка: или
или
 , где, R - радиус Земли.
, где, R - радиус Земли. (3)
(3)