|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Какие датчики или системы подключены к НПП, зависит от выбранного летчиком режима работы ПНК и этапа полета.Через блок связи на НПП подаются сигналы текущего ψ и заданного ψЗ курсов, а также курсового угла радиостанции ψКУР. От НПП сигнал
Рис. 2. Функциональная схема ПНК
Сюда же поступают от гироинерциальной доплеровской навигационной системы (ГИДНС, см. ГЗ33) сигналы бокового отклонения Z самолета и его производной Ź. В БТУ формируется сигнал - используется для управления командной стрелкой канала крена; - подаётся через блок усилителей на рулевой агрегат РАУ-К управления элеронами; -подаётся на блок автоматического триммирования БАТ для управления механизмом триммирования. Если сигнал dЭ=dРАУ+dТРИМ dРАУ= k1wx – k2γ, где k1, k2 – коэффициенты пропорциональности, wx- угловая скорость с датчика угловых скоростей.. В канале стабилизатора управляющим сигналом на входе блока усилителей и для горизонтальной командной стрелки КПП является отклонение Dnуперегрузки от заданного значения. Значение nу поступает с датчика линейного ускорения ДЛУ. Значение nузформируется в блоке траекторного управления или в блоке управления высотой БУВ. В первом случае входными сигналами являются угол тангажа u и отклонение ΔН от заданной высоты полета. Во втором случае на вход БУВ поступают сигналы заданной НЗ и текущей Hбарометрических высот, чисел М3и М отзадатчикавысоты и скорости ЗВС, угла θнаклона траектории полета.  По этим сигналам ПНК осуществляет стабилизацию М3 или Н3 при ограничении величин углов тангажа или угла наклона траектории θ. При этом заданная высота может быть функцией расстояния самолета до определенного пункта маршрута. Решение задачи автоматического полета по маршруту с помощью ПНК сводится к следующему. Весь маршрут полета разбивается на несколько отрезков ортодромии (рис. 3). Рис. 3. Ортодромический маршрут полёта
Координаты точки 0 (стоянки самолета), исходного пункта маршрута ИПМ и всех (например, четырех) промежуточных пунктов маршрута ППМ вводятся в ЦВМ при составлении программы полета. После прохода ИПМ включается автоматический режим ПНК. Самолет летит по отрезку ортодромии ИПМ-ППМ. При этом в инерциально-доплеровской системе ГИДНС при коррекции от РСБН осуществляется счисление пути и сравнение вычисленных координат местоположения самолета с координатами ППМ1, записанными в памяти ЦВМ. Если самолет отклоняется от линии заданного пути, то в БТУ поступают сигналы Z, Ź и Δψ, что обеспечивает возвращение самолета на линию заданного пути. При достижении самолетом точки a , от которой производится переход самолета на новую ортодромию ППМ1-ППМ2 с заданным радиусом R разворота, ЦВМ осуществляет переключение точки цели полета с ППМ1 на ППМ2. В результате самолет оказывается отклоненным от новой линии заданного пути на величину Z и имеет новый заданный курс ψ3на ППМ2 (рис. 3). В БТУ формируется команда Пилотажно-навигационные комплексы транспортных самолетов обеспечивают автоматический сброс грузов в заданной точке, а самолетов разведчиков – автоматическое фотографирование цели или заданного участка маршрута. При полете самолета по отрезку ортодромии, на котором расположена цель, автоматически осуществляется подготовка системы сброса груза или фотографирования. В навигационной системе непрерывно контролируется расстояние самолета до цели путем определения координат самолета и сравнения их с координатами цели. В момент, когда разности координат станут равными нулю, выдается команда на сброс груза или выполнение фотографирования.
Вывод: ПНК является составной частью более общего бортового комплекса оборудования. Бортовые комплексы (БК) представляют собой функционально связанные бортовые системы и оборудование, устройства и вычислительно-программирующие средства, обеспечивающие автоматизированное решение задач боевого применения, пилотирования и навигации.Как правило, бортовой комплекс состоит из нескольких бортовых комплексных систем (БКС), объединенных в комплексы различного назначения: пилотажный комплекс (ПК), навигационный комплекс (НК), прицельный комплекс (ПрК) и др.
|
||
|
|
Последнее изменение этой страницы: 2018-05-31; просмотров: 364. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 подается на вычислитель – блок траекторного управления (БТУ).
подается на вычислитель – блок траекторного управления (БТУ).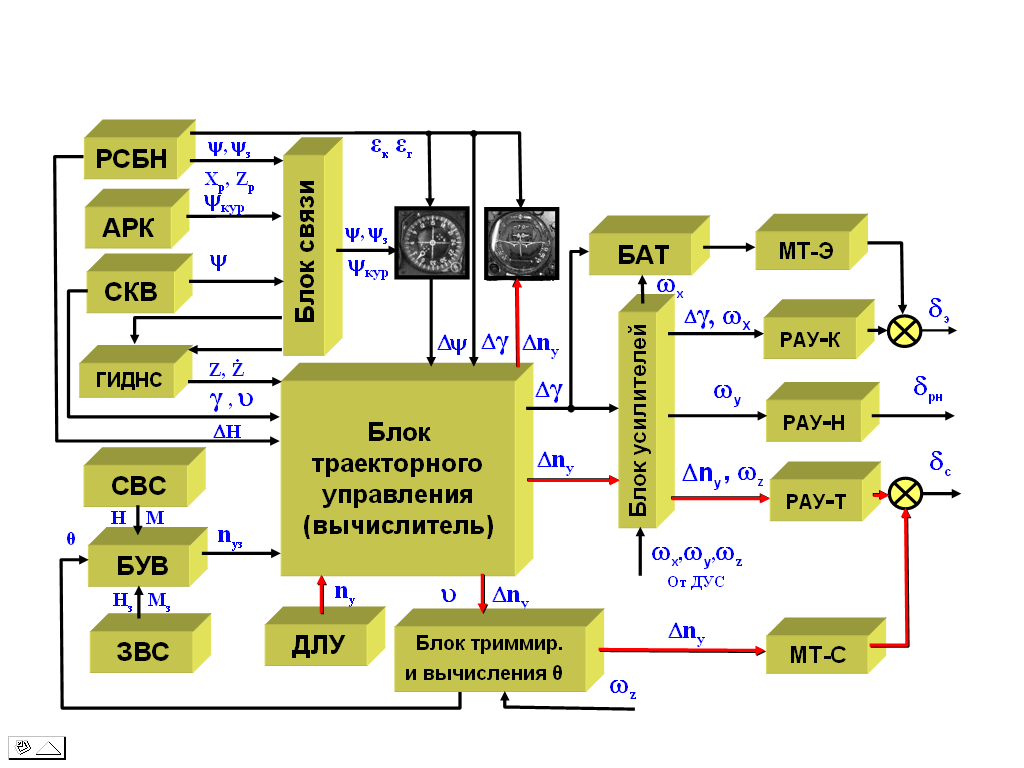
 , который:
, который: превышает определенное значение, то БАТ включает механизм триммирования МТ-Э в канале элеронов, обеспечивая интегральное слагаемое в законе управления элеронами.
превышает определенное значение, то БАТ включает механизм триммирования МТ-Э в канале элеронов, обеспечивая интегральное слагаемое в законе управления элеронами.
 на выполнение разворота самолета на новую ортодромию ППМ1-ППМ2. При подходе к ППМ2 аналогично формируется команда управления для перевода самолета на участок ППМ2-ППМ3 и т.д.
на выполнение разворота самолета на новую ортодромию ППМ1-ППМ2. При подходе к ППМ2 аналогично формируется команда управления для перевода самолета на участок ППМ2-ППМ3 и т.д.