|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
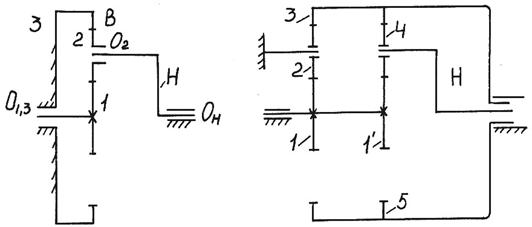
Кинематика зубчатых механизмов с подвижными осями вращенияЗубчатая передача, у которой геометрическая ось хотя бы одного из колес подвижна, называется планетарной. Различные планетарные механизмы можно представить в виде трех типов передач. 1. Простые планетарные передачи, обладающие одной степенью подвижности, у которых одно из основных звеньев закреплено неподвижно (рис. 15.7, закреплено звено 3). Такие механизмы служат для последовательной передачи потока мощности. 2. Дифференциальные передачи, обладающие двумя степенями подвижности, у которых все основные звенья подвижны (рис. 15.6). Эти передачи позволяют суммировать два или несколько потоков мощности, поступающих от независимых источников, либо распределять их по независимым потребителям. 3. Замкнутые дифференциальные передачи, получаемые из дифференциальных передач путем замыкания двух основных звеньев (центрального колеса и водила) простой передачей, состоящей из колес 1, 2, 3 (рис. 15.8). Такие передачи позволяют получить большие передаточные отношения при малых габаритах. Рассмотрим механизм, изображенный на рис. 15.6. Определим число степеней подвижности, если
Определенность в движении звеньев уэтого механизма будет в том случае, если будут заданы законы движения двум звеньям. Основными звеньями механизмов с подвижными осями являются водило (Н) и соосные с ним колеса (1 и 3). В данном случае все основные звенья подвижные. Оба эти признака (W> 1 и подвижные основные звенья) определяют дифференциальный механизм. Определим степень подвижности для механизма, изображенного на
У этого механизма колесо 3 (основное звено) неподвижно и W= 1. Оба признака определяют планетарный механизм. Механизмы замкнутых  дифференциалов имеют все основные звенья подвижными, но число степеней подвижности равно единице (W= 1). Таким образом, только по совокупности двух признаков механизмы с подвижными осями можно отнести к тому или иному типу. Формулы 15.5, 15.7 для определения передаточного отношения планетарных и дифференциальных механизмов использовать нельзя, так как сателлит участвует в сложном движении, состоящем из вращения вокруг оси O2 и вращения вместе с водилом Н вокруг оси Он (см. рис.15.6, 15.7).
Для вывода зависимостей, связывающих угловые скорости механизмов, имеющих подвижные оси, воспользуемся методом обращения движения. Допустим, что в действительном движении звенья механизма (см.рис.15.6) имеют угловые скорости
Так как водило Н стало неподвижным (
где
В правую часть предыдущей зависимости подставим значение относительных скоростей:
Полученное уравнение называется формулой Виллиса для дифференциальных механизмов. Левая часть, как показано выше, может быть выражена через число зубьев колес. Определенность в решении правой части будет иметь место, когда будут известны скорости двух ведущих звеньев. Установим, какой вид примет формула Виллиса для планетарного механизма, изображенного на рис. 15.7. У этого механизма колесо 3 жестко соединено со стойкой (заторможено), т.е. Таким образом, имеем
Откуда Полученную зависимость называют формулой Виллиса для планетарных механизмов, а передаточное отношение Как и для дифференциальных механизмов, В общем случае:
где Достоинством планетарных механизмов является возможность получения больших передаточных отношений при малых габаритах. |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 671. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 = 4 - число звеньев,
= 4 - число звеньев,  и
и  – число кинематических пар V и IV класса.
– число кинематических пар V и IV класса.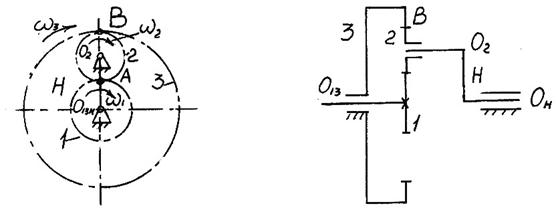




 . Сообщим всем звеньям скорость, равную угловой скорости водила, но противоположно ей направленную, т.е.
. Сообщим всем звеньям скорость, равную угловой скорости водила, но противоположно ей направленную, т.е.  . В этом случае угловые скорости звеньев будут соответственно равны:
. В этом случае угловые скорости звеньев будут соответственно равны:
 ), то мы получили "обращенный механизм" с неподвижными осями. Для этого механизма справедлива зависимость
), то мы получили "обращенный механизм" с неподвижными осями. Для этого механизма справедлива зависимость
 –передаточное отношение "обращенного механизма, которое можно определить через число зубьев колес:
–передаточное отношение "обращенного механизма, которое можно определить через число зубьев колес:
 (15.9)
(15.9) .
.
 (15.10)
(15.10) – планетарным передаточным отношением.
– планетарным передаточным отношением.
 – передаточное отношение от звена К к звену l (l – соответствует неподвижному центральному колесу).
– передаточное отношение от звена К к звену l (l – соответствует неподвижному центральному колесу).