СИНТЕЗ ОПТИМАЛЬНОЙ ПОЗИЦИОННОЙ САУ ДЛЯ ОБРАБОТКИ БОЛЬШИХ, СРЕДНИХ И МАЛЫХ ПЕРЕМЕЩЕНИЙ.
Для того чтобы любое перемещение отрабатывалось оптимально, необходимо, чтобы задание для скорости формировалось исходя из текущего рассогласования по положению при условии торможения с максимальным расчетным замедлением.




В этом случае мы получаем нелинейный(параболический) регулятор напряжения. При отработки малых рассогласований система управления будет неустойчивой, так как при  Поэтому необходимо при малых рассогласованиях переходить к линейному регулированию с постоянным коэффициентом усиления. Поэтому необходимо при малых рассогласованиях переходить к линейному регулированию с постоянным коэффициентом усиления.
| DSнечувствит.<DSдоп.ошибки
|


ВЛИЯИНИЕ УПРУГОСТИ НА САУ СКОРОСТЬЮ ЭП. МЕТОДЫ УЛУЧШЕНИЯ РАБОТЫ САУ.
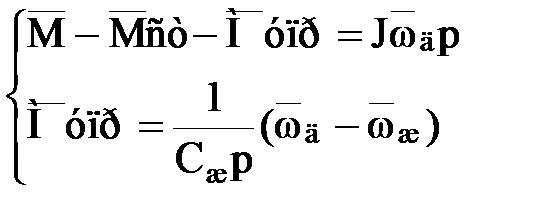
Наличие упругой связи приводит к возникновению колебаний, так как звено 1/Jдp охватывается дополнительно динамической упругой связью. Возможно возникновение резонансных колебаний. Для уменьшения влияния упругости на качество работы системы необходимо: 1) синтез регуляторов выполнить с учетом упругой связи;
2) ввести дополнительную (или основную) обратную связь по скорости механизма.
|