|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Разомкнутое управление по принципу тока. Принципы построения схем управления.Стр 1 из 7Следующая ⇒ Разомкнутое управление по принципу времени. Аппараты управления. Принципы построения схем. Расчет уставок реле времени. В случае неизменного во времени объекта управления (ОУ) и неизменных условий работы, информация о состоянии ОУ также заранее известна и система может быть выполнена разомкнутой (без обратных связей). Для логического управления необходимо иметь несколько статических характеристик привода. За счет перехода с одной характеристики на другую формируется процесс пуска и работы на промежуточной скорости. Необходимое количество характеристик можно получить за счет введения сопротивления в цепь якоря ДПТ или реактивных в цепь ротора АД. Реле времени может быть электромагнитным, пневматическим, гидравлическим. Если применить электромагнитное реле времени то схема пуска ДПТ с 3 ступенями сопротивления выглядит так: Расчет уставок реле времени
Достоинства управления по принципу времени: общее время пуска не измениться. Недостатки: возможность увеличения максимального тока.
Разомкнутое управление по принципу скорости. Способы контроля скорости. Принципы построения схем управления. Возможен прямой контроль скорости и косвенный. Прямой контроль скорости выполняется с помощью датчика скорости (тахогенератора) и является прямым измерением значения скорости. Косвенный контроль осуществляется с помощью обычных реле, реле минимального и максимального напряжения. Косвенный контроль скорости в основном характерен для ДПТ:
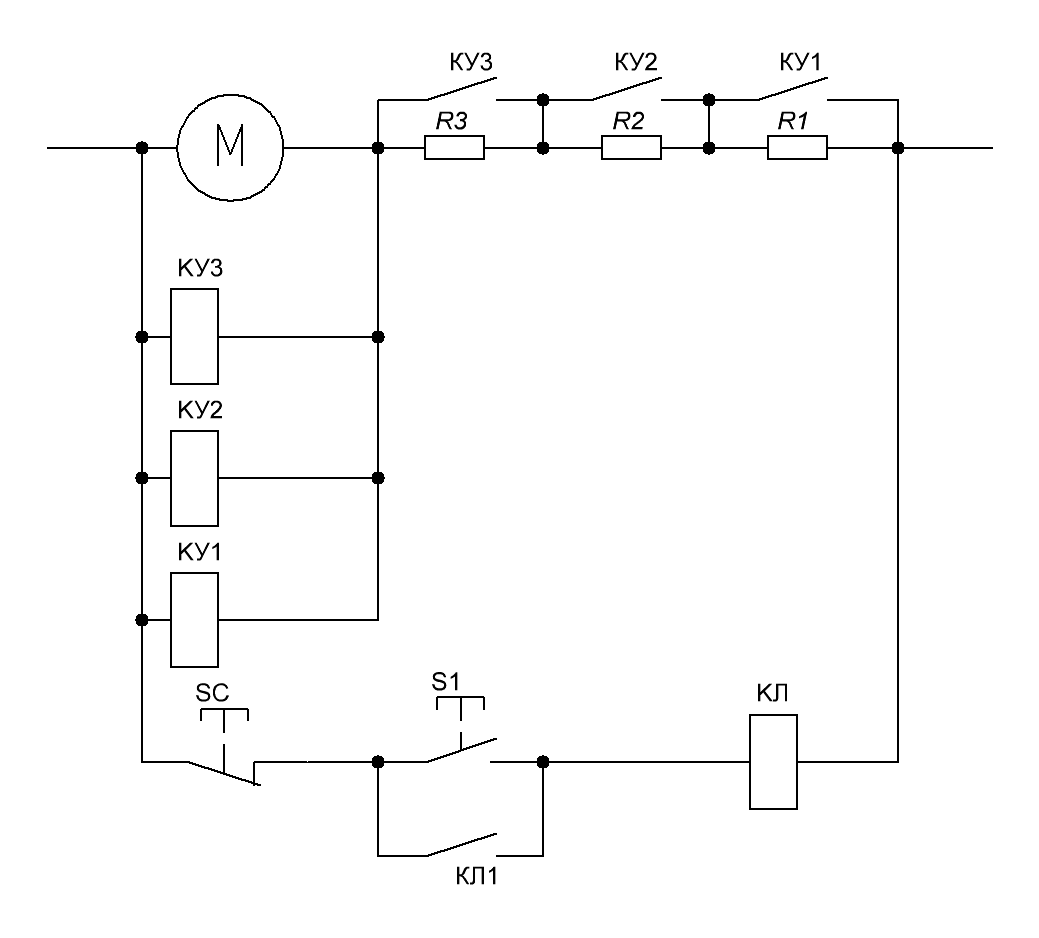
Так же косвенный контроль скорости применяется в АД с фазным ротором.  Рассмотрим схему управления ДПТ с использованием косвенного контроля скорости:
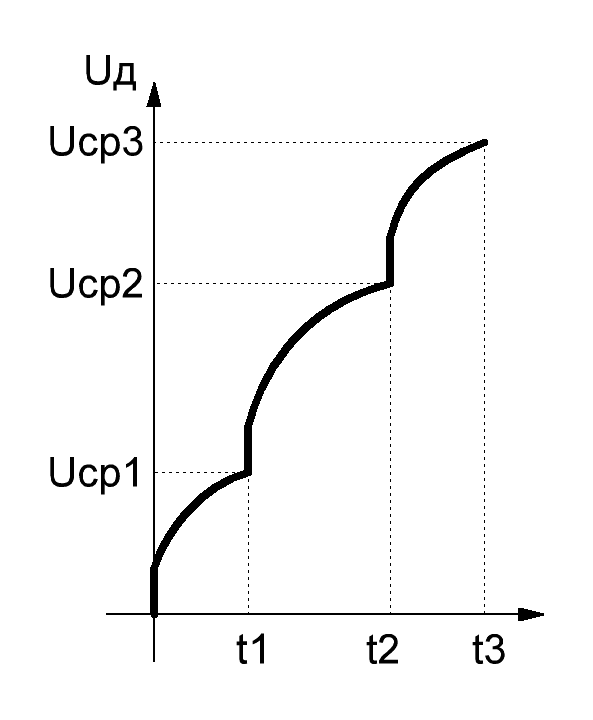
Тогда во времени будем иметь зависимости напряжения срабатывания:
Отметим, что чаще всего на зажимы двигателя включаетсярелле ускорения, коорое включает и выключает котушки контакторов ускорения. Возможно применение реле с одинаковым напряжение срабатывания. Для этого один из концов котушек реле подключают на точки пускового сопротивления. В этом случае имеем:
Достоинства и недостатки:
1) J<Jрас => время работы на каждой cтупени уменьшается, меньше нагрев резисторов. 2) J>Jрас => время работы на каждой cтупени увеличивается , больше нагрев резисторов. 3) Mcт<Mст.рас => время работы на каждой cтупени уменьшается, меньше нагрев резисторов. 4) Mcт>Mст.рас => время работы на каждой cтупени увеличивается, больше нагрев резисторов. 5) U<Uрас, затягивается разгон и может произойти застревание.
Разомкнутое управление по принципу тока. Принципы построения схем управления.
Для подачи команды на закарачивание очередной ступени сопротивления необходимо контролировать максимальное значение тока. Переключение осуществляется при одном и том же значении минимального тока. Команда на закарачивание очередной ступени подается таким образом: при отключении реле ускорения, следовательно для включения контакторов ускорения необходимо использовать размыкающий контакт токового реле (используется реле минимального тока). Исходное состояние контактов этих реле замкнутое (возможно ложное срабатывание контактов ускорения). Обычно применяются отдельные реле минимального тока для каждой ступени. Для упрощения схемы выбор очередного реле и запоминание обеспечивается с помощью силовых контактов контакторов ускорения.
За время срабатывания КI1 КУ1 не должен успеть включиться т.е. необходимо выполнение условия: tср.ку>tнар.т>tср.ki. так как надежность работы схемы зависит от соотношения времени срабатывания, то часто приходиться включать блокировочные промежуточные реле увеличивающие время срабатывания контактора ускорения. |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 541. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

 время работы на n ступени
время работы на n ступени