|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Назначение, состав и принцип работы блока усилителей. ⇐ ПредыдущаяСтр 10 из 10 Блок усилителей 7 (см. рис. 4.7) предназначен для согласования выходных сигналов блоков станции СУРК-3 со входами блока БИК-3, табло ТК-3, табло диспетчера и аппаратов звуковой сигнализации. Он состоит из набора транзисторных и транзисторно-релейный ячеек, на входы которых поступают сигналы от блоков контроля температуры воздуха и теплоносителя, блока контроля секций, от датчика давления, датчиков конечного положения и механической защиты исполнительных механизмов регулирования. Выходы этих ячеек коммутируют цепи сигнальных ламп и аппаратов звуковой сигнализации. 5.АВТОМАТИЗАЦИЯ ВОДОТЛИВНЫХ УСТАНОВОК Водоотливные установки применяются для удаления за пределы открытых и подземных горных работ вод, которые поступают в горные выработки из атмосферы (дождь, тающий снег и т.д.) и водоносных горизонтов (грунтовые воды). Для осушения открытых горных работ применяются открытые водоотливные установки, дренажный подземный комплекс или погружные насосы. Подземные горные работы осушаются с помощью водоотливных установок. Водоотливная установка состоит из насосной станции (погружных насосов),водосборника (ЗУМПФ), системы трубопровода и штреков( дренажная шахта), по которым воды из массива горных пород стекаются в ЗУМПФ. Насосная станция расположена на дне карьера в непосредственной близости от открытого водосборника. Последний имеет дополнительный объем для скопления вод в основном при аварийном уровне.
5.1. ОСНОВНЫЕ ЗАДАЧИ АВТОМАТИЗАЦИИ Обводненность горных выработок является основным неблагоприятным фактором, ограничивающим использование горных машин, ухудшающим безопасность и уменьшающим производительность труда.  Основными задачами автоматизации водоотлива являются: – обеспечение нормального функционирования водоотлива без постоянного присутствия обслуживающего персонала; – пуск и остановка насосов в зависимости от уровня воды, в водосборнике в пределах регулировочной емкости; – автоматическое управление насосными агрегатами; поочередная работа насосных агрегатов; – автоматическое включение резервных насосных агрегатов при неисправности и автоматическом отключении работавших; – возможность применения различных способов заливки (баковыми аккумуляторами, с применением погружных насосов, из нагнетательного трубопровода, вспомогательным насосом и с помощью сифонного способа); – дозирование заливки по времени; работа насосов без управляемых задвижек; – быстрое переключение с автоматического управления на ручное. Системы автоматизации процесса откачки вод а также должны обеспечивать: – местное управление отдельными агрегатами для наладочных ремонтных работ; – местное управление любым числом насосных агрегатов без нарушения работы остальных агрегатов в автоматическом режиме; – аварийный останов насосов при снижении или потере производительности, перегреве подшипников, исчезновении напряжения в цепях управления, коротких замыканиях; – блокировки, исключающие пуск насосного агрегата при не залитом насосе, включение моторного привода задвижки до пуска насосного агрегата, останов насосного агрегата до полного закрытия задвижки, дистанционное включение насосов при отсутствии воды в водосборнике, повторное включение аварийно отключившегося насоса до устранения причин аварийного отключения; – контроль производительности насосов, перегрева подшипников и положения задвижек; – гидравлическую защиту, защиту от перегрева подшипников скольжения и др.; – сигнализацию в камере водоотлива: об аварийном отключении насосного агрегата и наличии напряжения в цепях управления, в центральном диспетчерском пункте рудника; о работе насосных агрегатов (световую), аварийном отключении (неисправности) насосных агрегатов (обезличенный сигнал); аварийном уровне воды в водосборнике; неисправности сигнальных цепей (световую и звуковую) и наличии напряжения в цепях управления. Согласно требованиям ЕПБ, главные водоотливные установки должны быть автоматизированы полностью, а участковые и вспомогательные установки – на 80 – 85%. Автоматизация осуществляется с применением серийно выпускаемой аппаратуры или индивидуального набора контактной и бесконтактной аппаратуры в зависимости от различных горнотехнических и гидрогеологических условий. Различие технологических схем установок учитывается вводом в программу алгоритмов их работы, задаваемых с помощью программы, которая закладывается в управляющий логический комплекс. Алгоритм определяет структуру построения схем и анализирует их работу. Обобщенный алгоритм управления водоотливной установкой при закрытых задвижках на нагнетательных трубопроводах насосных агрегатов показан на рис. 5.1.
рис. 5.1 Алгоритм управления автоматической водоотливной установкой. В соответствии с алгоритмом функционирование водоотлива осуществляется следующим образом. После включения в работу аппаратуры и ее программного устройства (оператор 1) контролируется уровень воды в водосборнике с помощью электродных датчиков (условие, представленное оператором 2). Когда вода поднимется к электродному датчику верхнего уровня Н=Нв, поступает команда на включение заливочного насоса, который подает воду в насос в течение времени, предусмотренного программным блоком. Качество заливки контролируется реле давления (оператор 5). Если в момент контроля уровня он достиг повышенного Н=Нп или аварийного уровня Н=НА (р=0), то программный блок сначала переключает схему на включение к насосов одновременно (оператор 4), а лишь затем включает заливочный насос. Когда насос (насосы) будет залит Рз>=Рзн (к=1) подается команда на ввод его в работу (оператор 6) с последующим контролем за производительностью с помощью флажкового реле производительности (логическое условие, представленное оператором 7). Если насос (насосы) развил заданную производительность Qф³ Qзад (r=l), то подается команда на открытие задвижки (задвижек) и схема переключается на контроль нижнего уровня (оператор 11), при достижении которого Н < Нн (р=1) насос будет отключен (оператор 2). Если насос по какой-либо причине не развил заданной производительности Q0 < Qзад (r=0), он отключается и подает сигнал диспетчеру (оператор 8), а аппаратура начнет новый цикл по включению в работу очередного насос. Автоматизированные водоотливные установки подразделяют на пять групп (табл. 5.1).
Таблица 5.1
5.2. СРЕДСТВА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И КОНТРОЛЯ
Для контроля уровня воды в водосборнике широко используются электродные датчики типа ЭД, которые контролируют сопротивление цепи: электрод – вода – «земля». Электродный датчик представляет собой один контакт в цепи управления, а вторым контактом является вода в водосборнике. При повышении уровня воды и контактировании ее с датчиком уровня замыкается цепь управления и подается сигнал на включение насосного агрегата. Электродный датчик (рис. 5.2) состоит из стального диска 6, со стаканом 2 и свинцовой обкладкой 1 для защиты диска от коррозии. На стакан навинчивается кабельный ввод 3.
рис. 5.2 Электродный датчик уровня ЭД
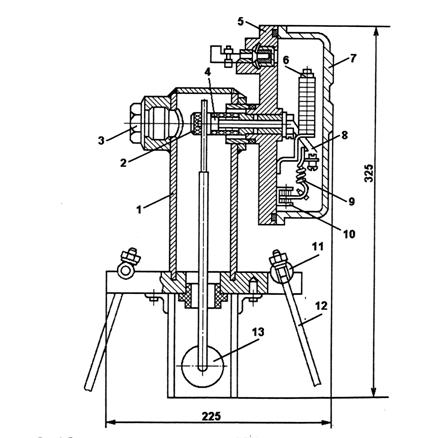
Контактирующим элементом является диск. После подключения жилы кабеля к контактной шпильке 5 полость стакана 4 заливается кабельной массой. Датчик подвешивается на кабеле в водосборнике на требуемой высоте. Подвеска датчика должна обеспечивать возможность изменения ее высоты. Обычно датчик нижнего уровня располагают на 50 мм выше всасывающей сетки подводящего трубопровода, датчик аварийного уровня - на 1 м ниже уровня пола насосной камеры. Для контроля уровня применяются также электродные датчики ДУ-1007. Датчик выполнен в виде кислотоупорного винипластового стержня, на котором смонтированы контакты нижнего уровня и подвижное кольцо с контактом верхнего уровня. Электродные датчики работают совместно с различными схемами устройств контроля уровня. Цепи контроля уровня должны быть искробезопасными. Исполнительные элементы схемы обеспечивают релейность характеристики, т.е. напряжение на обмотке исполнительного реле изменяется скачкообразно в зависимости от величины сопротивления цепи: электрод – вода –«земля». Наибольшей надежностью обладают схемы контроля уровня, построенные с использованием транзисторных и тиристорных усилителей, а также реле на герконах. Наладку электродных датчиков производят в зависимости от выбранного режима работы водоотливной установки с учетом удельной электропроводности шахтных вод, максимального сопротивления самих электродных датчиков и уровня воды в водосборнике. Для контроля заливки насосов используют реле контроля давления РДВ (рис. 5.3), которое устанавливают на всасывающей крышке насоса в отверстие, предназначенное для установки вакуумметра, чувствительным элементом реле давления является резиновая мембрана 7. Реле имеет две дискретные ступени регулировки срабатывания по давлению. Выбор ступени осуществляется при введении в действие с помощью винта 5 только малого поршня 8 или малого поршня совместно с большим 6, что соответствует уменьшению или увеличению рабочей площади мембраны.
рис. 5.3 Реле контроля давления РДВ.
При заливке погружным или вспомогательным насосом реле РДВ настраивают для работы на малом поршне. В случае заливки насоса из бакового аккумулятора реле настраивают для работы на большом поршне. Сила давления воды, воспринимаемая мембраной, передается через поршень на шток 10, который воздействует на микропереключатель 2. Предварительное сжатие пружины 11, необходимое для четкого срабатывания реле, регулируется штоком 10, в верхней части которого имеется участок шестигранного сечения. При регулировке шток ввинчивают в специальную гайку 9, которая фиксируется шпилькой 4. Зазор между микропереключателем и штоком (не более 0,5 мм) можно изменять с помощью регулировочной гайки 3 Под гайку болта, крепящего крышку реле, подложена шайба 1 из гетинакса для обеспечения герметизации. Реле имеет высокую чувствительность, быстро реагирует на изменение давления, имеет длительный межремонтный срок. толщину мембраны выбирают в зависимости от способа крепления, качества материала и площади опорного диска. На работу реле отрицательно действуют температурные изменения: при низких температурах резиновое покрытие мембраны отвердевает. Реле контроля производительности РПН (рис. 5.4) предназначается для контроля работы насосов по наличию потока жидкости на всасывающем трубопроводе.
рис. 5.4 Реле контроля производительности РПН.
Принцип действия основан на изменении усилия, возникающего при обтекании флажка потоком жидкости с различными давлениями. пропорциональными расходу жидкости по трубопроводу. Реле состоит из корпуса 1 и платы 5, соединенных болтами. В верхней части корпус имеет два отверстия: одно для ввода валика 4, второе, заглушенное пробкой 3, для ключа под специальную гайку 2. крепящую шток с резиновым флажком 13. Нижняя часть корпуса состоит из массивной платы с двумя проушинами для поворотных валиков 11. при помощи которых шпильками 12 реле укрепляется на трубопровод. Крышка 7 закрывает рабочую камеру реле, в которой размещается контактная группа 6. При воздействии потока жидкости на флажок 13 поворачиваются жестко связанный с ним валик 4 и рычаг 8, переключающий контактную группу. Изменяя предварительное натяжение пружины 9 с помощью винта 10, реле можно настроить на срабатывание при определенной скорости потока жидкости. При снижении скорости жидкости в трубопроводе флажок под действием пружины возвращается в исходное положение. При этом замкнутся или разомкнутся электрические цепи, сигнализирующие о неисправности насоса или его остановке. Реле производительности РПН устанавливается на горизонтальном участке всасывающего трубопровода, для этого в трубе вырезается щель. В отверстие вставляют нижнюю часть реле с флажком и затягивают гайки шпилек обжимного хомута. Для устранения засасывания воздуха между корпусом реле и трубопроводом располагается резиновая прокладка. Аналогичную конструкцию имеет реле РПФВ-1К взрывобезопасного исполнения. Эти реле не требуют сложной наладки, на их работу в малой степени влияет загрязнение рудничных вод. Термодатчик ТДЛ-2 (рис. 5.5) применяется для контроля температуры подшипников в насосных установках.
рис. 5.5 Термодатчик ТДЛ-2.
В наконечник датчика 9 сплавом Вуда (температура плавления примерно 65 – 75° С) впаян стержень 8, который спиральной пружиной 7 соединен с валиком 5. Такое соединение, заменяющее храповой механизм, обеспечивает относительный поворот стержня и валика только в направлении разворота витков другой пружины, нижний конец которой через втулку 6 соединен с валиком, а верхний – закреплен в корпусе датчика. При заводе пружины рукояткой 1 происходит поворот валика в витках пружины и переключение контактов микропереключателя 2. После этого датчик готов к работе. При нагреве датчика в наконечнике плавится сплав Вуда и нарушается его связь со стержнем. Подвижная часть датчика поворачивается, размыкая контакты микропереключателя. После остывания сплава поворотом рукоятки датчик снова приводится в рабочее состояние. Датчик температуры ТДЛ-2 монтируется в специально рассверленное отверстие в корпусе подшипника с возможным отклонением отверстия по вертикали не более 20° С. На один насосный агрегат устанавливаются четыре датчика. Датчики соединяются между собой последовательно. Датчик крепится в корпусе подшипника с помощью штуцера 3, который опирается на проволочное кольцо 4. В зависимости от глубины отверстия кольцо устанавливается в соответствующую выточку 10 трубки. В верхней части отверстия нарезают резьбу М18 х 1,5 на глубину 20 мм. Для лучшей теплопроводности и устранения дополнительной погрешности срабатывания отверстие заполняют машинным маслом, затем вставляют наконечник датчика и завинчивают штуцер. Датчик ТДЛ-2 имеет рудничное нормальное исполнение. Разрывной ток контактов 3 А. Для контроля температуры подшипников насоса и электродвигателя применяется также аппаратура АТВ-229, позволяющая контролировать температуру в 10 точках с помощью термодатчиков ТР-33 (терморезисторы с релейной характеристикой). Привод задвижки ПЗ-1 предназначен для управления задвижками нагнетательных трубопроводов водоотливных установок, оборудованных аппаратурой автоматизации. Привод ПЗ-1 обеспечивает: – дистанционное включение двигателя при подаче команды от аппаратуры автоматизации; – автоматическое отключение двигателя в крайних установленных положениях задвижки; – регулировку отключения двигателя в крайних положениях задвижки в диапазоне от 5 до 40 оборотов; – автоматическое отключение двигателя при перегрузке привода; – отключение двигателя при переходе на ручное управление; – фиксирование цепи управления в разомкнутом состоянии или самовосстановление с регулируемой выдержкой времени до 1 минуты. Привод задвижки состоит из асинхронного двигателя с короткозамкнутым ротором, мощностью 2,2 кВт, четырехступенчатого редуктора с прямозубыми шестернями, маховика, расположенного на предпоследнем валу редуктора и служащего для ручного управления задвижкой, полумуфты, посаженной на выходной вал редуктора, и камеры выключателей. Корпус редуктора, отлитый из чугуна, неразъемной конструкции, в нижней части имеет лапы для крепления привода. В корпусе с выходным валом редуктора посредством пары цилиндрических шестерен связан червячный редуктор, который обеспечивает передачу вращения блоку кулачков, воздействующих на конечные выключатели. В редукторе имеется регулируемая предохранительная муфта. Корпус камеры выключателей содержит блок кулачков, блок выключателей, блок защиты и шкалу положения задвижки. На крышке камеры есть смотровое окно, закрытое стеклом, для визуального наблюдения за шкалой положения задвижки и кнопка восстановления цепи управления привода после срабатывания защиты от перегрузки.
Гидравлическая схема автоматизированной водоотливной установки.Гидравлические схемы автоматизированных установок различают в зависимости от способов заливки насосов: – насос и всасывающий трубопровод заполняются водой перед пуском; – насос постоянно заполнен водой. В первом случае заливка насоса производится из нагнетательного става с помощью заливочного погружного насоса. Во втором случае используется баковый аккумулятор – сосуд цилиндрической формы, вмонтированный во всасывающий трубопровод насосного агрегата. После остановки насосного агрегата аккумулятор и насос остаются заполненными водой. Уравнительная труба исключает опустошение бака-аккумулятора после остановки насоса. В последнее время применяют заливочные погружные насосы для всех типов водоотливных установок. Наибольшее распространение получил погружной заливочный насос ЗПН. Насосный агрегат состоит из корпуса насоса, открытого рабочего колеса, всасывающей сетки, электродвигателя, верхнего и нижнего щитов с подшипниками. Обмотка статора залита компаундной массой, камера ввода – кабельной массой. Напор насоса 15 м. На рис. 5.6 показана гидравлическая схема автоматизированной главной водоотливной установки.
рис. 5.6 Гидравлическая схема автоматизированной водоотливной установки.
Если главные насосы не находятся в постоянно залитом состоянии, водоотливная установка должна быть оборудована вспомогательными насосами. Для установки с числом насосов более трех дополнительно устанавливается необходимое количество вспомогательных насосов. При этом их количество определяется из расчета, что один насос рассчитан для заливки от одного до трех главных насосных агрегатов. Штуцер разгрузки насоса соединяется со штуцером всасывающей полости насоса. Такое соединение обеспечивает свободный выход воздуха из насоса при заливке и является гидрозатвором для штуцера всасывающей крышки во время работы насоса. Если на сальники насоса необходимо подавать воду, отвод следует брать после тройника, соединяющего штуцер всасывающей крышки со штуцером разгрузки. Процесс автоматизации насосного агрегата заключается в следующем. При верхнем уровне воды в водосборнике электродный датчик 4 верхнего уровня выдает сигнал в общий блок насосов 5. В этом блоке отрабатывается команда на включение заливочного насоса 3, который осуществляет заливку основных насосов 2 по времени. По истечении времени заливки блок 5 производит включение двигателя 1 основного насоса 2. При этом выдается сигнал на включение по открытию электропривода задвижки 7, что приводит к постепенному повышению подачи основного насоса. Затем отключаются заливочный насос и электропривод задвижки. В таком состоянии схема функционирует до откачки воды ниже датчика нижнего уровня. Блок 5 выдает команду по включению электропривода задвижки на ее закрытие и отключение основного насоса. Аналогично работают насосные агрегаты 2, 3, получающие команды от блоков управления 6. Применение в цикле автоматизации работы моторной задвижки уменьшает действие гидравлического удара на систему трубопровода и элементы основного насоса. При малых высотах нагнетания электропривода задвижки не применяются. В системе автоматизации водоотлива осуществляются защиты по контролю температуры подшипников датчиками 10, подачи насосов – реле производительности 8 и заливки – реле давления 9. В аварийных режимах от этих элементов в блоки насосов выдаются сигналы, которые обеспечивают отключение неисправного агрегата и автоматический ввод резервного по ранее рассмотренной программе. Система автоматизации также предусматривает возможность работы одного или нескольких агрегатов при верхнем, повышенном, аварийном уровне, а в случае необходимости – вывод агрегатов на ремонт или ручное управление. В гидравлической схеме предусматривается два става: рабочий и резервный. Их работа обеспечивается группой вентилей 11. В случае ручной заливки используются вентили 12, установленные на нагнетательном трубопроводе в системе задвижки, и обратные клапаны 13. Разгрузочные устройства 14 обеспечивают свободный выход воздуха из насоса при заливке и снижают осевое давление на ротор. Процесс заливки обеспечивается приемным клапаном 15.
5.3. КОМПЛЕКСНАЯ АППАРАТУРА АВТОМАТИЗАЦИИ ГЛАВНЫХ
Аппаратура автоматизации АВО-3.В комплект АВО-3 входят: аппарат управления АУО-3, реле производительности РПФК-1К, электродные датчики ЭД и заливочный насос ЗПН. Принципиальная электрическая схема аппаратуры АВО-3 показана на рис. 5.7. Положение контактов на схеме соответствует исходному состоянию. Рассмотрим работу схемы в автоматическом режиме.
рис. 5.7 Принципиальная схема аппаратуры АВО-3.
При контакте верхнего слоя воды в водосборнике с датчиком верхнего уровня ЭДВ замыкается цепь питания реле РВ, оно включается и замыкает своим контактом РВ2 цепь питания реле защиты Р2. Одновременно реле РВ самоблокируется через датчик нижнего уровня ЭДН с помощью контакта РВ3, а контактом РВ1 включает двигатель М1 моторного реле времени. Реле защиты Р2, включившись, замыкает цепь питания реле гидравлической защиты Р3, которое включается и своим контактами замыкает цепь пускателя включения заливочного насоса на схеме не показан) и подготавливает цепь включения главного насоса.. Через 63 с замыкается контакт моторного реле Р16 в схеме пускателя главного двигателя, получает питание катушка реле РУ и оно замыкает свой контакт в цепи катушки контактора К, он включается и подает питание приводному электродвигателю насоса М2, двигатель включается. Еще через 23 с , в течении которых насос должен развить нормальную скорость и производительность, замкнутся контакты реле производительности и одновременно обесточится ( контакт Р11) двигатель моторного реле времени. Хотя и отключится контакт Р12 в цепи питания Р3, оно остается включенным, если насос развил заданную производительность, так как в этом случае замкнется в цепи питания Р3 контакт реле производительности РП5. Если за заданное время производительность насоса не достигнет заданной (то же при потери производительности), реле Р3 обесточится и отключит пускатель главного двигателя насоса ( разрывается контакт Р3.2). При снижении уровня воды ниже ЭДН обесточится реле РВ, отключится и разорвется цепь питания реле защиты Р2, которое отключит промежуточное реле эащиты Р3, что приведет к отключению пускателя главного насоса. Одновременно реле Р2 замкнет цепь моторного реле времени, в результате чего двигатель запустится и вернет контактные диски в исходное состояние, в котором произойдет отключение питания контактов Р1.4 и моторное реле остановится в исходном положении до следующего повышения уровня воды. В цепь реле защиты Р2 включены контакты термодатчиков контроля температуры подшипников двигателя и насоса, которые при перегреве размыкаются и отключают реле Р2,что в конечном счете приводит к отключению насосной установки.
Аппаратура автоматизации УАВ.Схемой УАВ предусмотрена сигнализация о наличии напряжения в сетях управления, о paбoтe насоса, о неисправности насосных агрегатов и об аварийном уровне воды в водосборнике. Предусмотрены следующие виды защиты: – защита oт работы при пoтepe производительности типа РПН; – защита подшипников oт перегрева при помощи термодатчиков типа ТДЛ; – защита от неисправности работы задвижки; – защита от пуска не залитого насоса Датчики верхнего, повышенного и аварийного уровней (рис. 5.8 и рис. 5.9) включены в цепи соответствующих делителей напряжения двигательных каскадов, выполненных на транзисторах VT1, VТ2, VT3, коллекторными нагрузками которых являются соответственно реле верхнего К1, повышенного К2 и аварийного К3 уровней.
рис. 5.8 Принципиальная электрическая схема блока ОБН и сигнального табло.
рис. 5.9 Принципиальная электрическая схема блока БН.
При повышении уровня воды в водосборнике датчик верхнего уровня ЭВ замыкает цепь: плюс выпрямителя UZ1, диод VD1, резистор R1, эмиттер – базовый переход транзистора VТ1, резистop R3, датчик ЭВ, зажим 3, минус выпрямителя UZ1. Транзистор VТ1 отпирается и образуется цепь питания обмотки: плюс выпрямителя UZ1, диод VD1, резистор R1, открытый транзистор VТ1, реле К1, минус выпрямителя UZ1. Реле срабатывает, самоблокируется своим замыкающим контактом К1.1 через датчик нижнего уровня ЭН и подает сигнал замыкающим контактом К1.2 в цепь управления насосными агрегатами. Реле К1 включает реле К4, с выдержкой времени, необходимой для заливки главного насоса, моторное реле времени включает двигатель главного насоса и привод задвижки на открывание. При откачке воды до нижнего уровня реле К1 обеспечивается, электропривод закрывает задвижки и насосы включаются. Работa насоса в автоматическом режиме oт повышенного и аварийного уровня аналогична работе насоса от верхнего уровня; программа устанавливается универсальным переключателем SA. Автоматическое включение резервного насоса осуществляется при срабатывании любого вида защиты, которое действует на реле защиты К5 и аварийный насос выключается. Вместо него включается резервный насос, настроенный для работы oт аварийного уровня. Защита oт работы пpu пoтepe производительности осуществляется с помощью реле производительности S, включенного в цепь реле гидравлической защиты К6. Если насос не разовьет нормальной производительности, то разомкнувшийся контакт KT5 реле времени обесточивает катушки реле К6. При этом отключается высоковольтное КРУ. Размыкающий контакт реле К6 замыкается в цепи двигателя реле времени КТ. Профильные диски этого реле при своем вращении разомкнут контакт КТ4, который обесточит реле K5, в результате чего отключается цепь питания двигателя реле времени. Контакт К5 замыкает цепь питания красной сигнальной лампы HL2, что указывает на неисправность данного насоса. Другой контакт К5 отключает вход генератора 26 кГц oт линии связи. 3ащuтa подшипников oт перегрева осуществляется термодатчиками ТДП-2 (SK1 – SK4), которые включены в цепь катушки реле защиты K5 при своем размыкании ее обесточивают. Предусмотрена защита oт неисправности работы задвижки с помощью реле КК и защита oт пуска не залитого насоса с помощью реле давления SР. Сигнализация осуществляется по занятой телефонной линии с частотным разделением сигналов, испoльзованием высокочастотных генераторов 14, 20, 26 кГц, а на сигнальном табло СТВ высокочастотные сигналы поступают на приемники, представляющие собой избирательные усилители на 14, 20 и 26 кГц с электромагнитным реле на выходе. При замыкании контакта реле производительности S включается высокочастотный генератор 20 кГц, возбуждается приемник 20 кГц и на сигнальном табло срабатывает соответствующее реле. Одновременно на сигнальном табло загорается сигнальная лампа HL3, сигнализирующая о нормальной работе насоса. При аварийном режиме размыкается один из контактов К5, который отключает выход генератора 26 кГц oт линии связи и включается звонок НА и красная лампа HL5.
Взрывобезопасная аппаратура автоматизации водоотливных установок типа ВАВ.1М. Аппаратура взрывобезопасная для автоматизации водоотливных установок ВАВ.1М предназначена для автоматического управления водоотливными установками действующих реконструируемых и строящихся шахт. Аппаратура выпускается в трех модификациях: – ВАВ1.1М – для автоматизации низковольтного водоотлива; – ВАВ2.1М – для автоматизации высоковольтного водоотлива с одной управляемой задвижкой; – ВАВЗ.1М – для высоковольтного водоотлива с двумя управляемыми задвижками. Аппаратура обеспечивает выполнение следующих функций: 1. Автоматическое, дистанционное и местное управление работой насосов. 2. Автоматическую заливку погружным насосом. 3. Автоматическую замену насоса, отключенного из-за неисправности, резервным насосом. 4. Цикличность работы насоса. 5. Последовательность запуска и остановки насосов при параллельной работе. 6. Запрет пуска неисправного насоса. 7. Запрет пуска насоса на время максимума энергопотребления. 8. Учет времени работы насосов. 9. Отображение сигналов диспетчеру об уровне воды, работе насосов, неисправности установки, времени начала и окончания максимумов энергопотребления. Аппаратура ВАВ.1М представляет собой систему автоматического управления водоотливной установкой, структурная схема которой представллена на рис. 5.10.
рис. 5.10 Структурная схема аппаратуры ВАВ.1М.
Система содержит блоки управления насосом 1, на входы, которых поступают сигналы от датчиков давления 2, производительности 3, температуры подшипников 4, заклинивания 5 и закрывания 6 приводов задвижек, включения высоковольтной ячейки 7, а с выхода блока 1 поступают сигналы на включение заливочного насоса 13, главного насоса 15, привода задвижек 14; блок формирования импульсов запуска и останова работы насосов 8, на входы которого поступают сигналы с датчиков нижнего 9, верхнего 10 и аварийного 11 уровней; блок приема и передачи сигналов 12, на входы которого поступают сигналы с датчиков промежуточных уровней 16, а также с датчиков нижнего 9, верхнего 10 и аварийного 11 уровней; линейные узлы 17, 19, соединенные между собой линией связи 18: блок передачи и приема сигналов 20; блок представления информации 21; блок внепикового управления электродвигателями 22; блок звуковой сигнализации 23; блок учета машинного времени работы насосов 24; блок программируемого таймера 25; блок формирования импульсов запуска и запрета работы насосов 26; блок задания программ 27; индикатор текущего времени и набора программ 28; блок ручного управления водоотливной установкой 29, который состоит из коммутаторов 30, 31, 32 и 33, кнопок 34, 35 и 36, диодов 37 и 38. Система автоматического управления работает следующим образом. При достижении водой в водосборнике датчика верхнего уровня 10, сигнал с него поступает в блок 8. В блоке 8 формируется сигнал, который поступает в блок управления насосом 1, где формируется сигнал на включение заливочного насоса 13. Заливочный насос подает воду в главный насос в течение времени, достаточного для создания в нем необходимого давления для срабатывания датчика 2 (это время регулируется резистором «Таймер» на передней панели субблока расшифровки неисправностей и резервного питания РП). По истечении заданного времени заливки с другого выхода блока 8 в блок 1 поступает сигнал, который приводит к формированию сигналов в блоке 1 на включение главного насоса 15, привода задвижки 14 на открывание и при отсутствии производительности, поддержанию во включенном состоянии привода заливочного насоса в течение заданного времени. При этом сигнал с первого выхода блока 8 снимается. Если на включаемом насосе не сработал датчик давления 2 к моменту выдачи сигнала на его включение, то с данного блока 1 в блок 8 выдается сигнал аварии, а блок 8 выдает сигнал на включение на другой блок 1, соответствующий другому насосу. Из блока 1, соответствующего неисправному насосу, в блок 12 поступит два сигнала: общей неисправности и вида неисправности. С момента выдачи сигнала на включение главного насоса блоком 1 производится контроль включения высоковольтной ячейки, контроль набора производительности насосом, контроль температуры подшипников, контроль заклинивания задвижки. Если через 10 секунд после подачи сигнала на включение главного насоса датчик 7 высоковольтной ячейки не включится, то блок 1 выдаст сигнал общей аварии в блок 8 для формирования сигнала запуска другого насоса с помощью другого блока 1, а в блок 12 из блока 1 поступят два сигнала: общей неисправности и вида неисправности, откуда они через линейные узлы 17, 19 и линию связи 18 поступят в блок 20. Одновременно блоком 1 снимаются сигналы на включение главного насоса, привода задвижки на открывание и выдается сигнал на включение привода задвижки на ее закрывание. Если через заданное время, достаточное для набора производительности главным насосом (это время регулируется резистором «Уст.Т2» на передней панели субблока управления механизмами УМ) не сработает реле производительности 3, то произойдет аварийное отключение насоса как и при неисправности высоковольтной ячейки. Аналогично происходит аварийное отключение при заклинивании задвижки и при перегреве подшипников. Информация о наличии уровней от датчиков 9, 10, 11 и 16, о работе главных насосов, об авариях с указанием их причин через блок 12, где она преобразовывается из параллельного в последовательный код, линейные узлы 17, 19, двухпроводную линию связи 18 поступает в блок передачи и приема сигналов 20. В этом блоке информация из последовательного кода снова преобразовывается в параллельный. С блока передачи и приема сигналов 20 информация о работе насоса поступает в блок машинного времени 24 и блок внепикового управления электродвигателем 22, а информация об аварийном уровне и об общей аварии поступает в блок звуковой сигнализации 23. В блоке учета машинного времени 24 фиксируется время работы насосов путем пуска счетчика по разрешающему сигналу от работающих главных насосов 15. Блок звуковой сигнализации 23 выдает звуковой сигнал аварийного уровня с одной частотой звучания или аварии насосной установки с другой частотой. При снижении уровня воды в водосборнике ниже датчика нижнего уровня 9 сигнал с него поступает в блок 8, где с интервалом в 10 секунд формируются сигналы для выдачи в блоки управления насосами 1. В блоке 1 формируется сигнал включения привода 14 на закрывание задвижки. При полном закрывании задвижки срабатывает датчик 5, который разрывает цепь управления главного насоса 15, и система возвращается в исходное состояние. Примерно через 160 секунд (это время регулируется от 0 до 300 секунд резистором на передней панели субблока управления механизмами УМ) блок управления насосом 1 возвращается в исходное состояние. В случае неотключения по каким-либо причинам высоковольтной ячейки блоком 1 выдается сигнал общей аварии и сигнал аварии высоковольтной ячейки. Эти сигналы аварии в виде звуковой и световой сигнализации воспринимаются диспетчером с помощью сигнального табло СТВ.1М. При необходимости пуск насосов водоотливной установки может быть осуществлен с блока ручного управления 29 путем перевода переключателя 33 (при необходимости и 32) в положение «Ручное» и нажатии кнопки «Пуск1» 34 (при необходимости и 35). В блок 20 поступает сигнал «Пуск1» («Пуск2»), который через линейные узлы 19, 17, линию связи 18 и блок 12 подается в блок 8, где формируется сигнал, аналогичный сигналу от датчика верхнего уровня. Дистанционный останов работы насосов может быть осуществлен с блока 29 путем нажатия кнопки 36 – «Стоп». При этом сигнал с блока 29 через диод 38 поступит в блок 20, откуда он через линейные узлы 19, 17, линию связи 18 и блок 12 подается в блок 8, где формируется сигнал, аналогичный сигналу от датчика нижнего уровня. В режиме внепикового управления электродвигателем система работает следующим образом. Программирование времени внепикового включения и запрета работы насосной установки производится с помощью блока задания программы 27. Программа с этого блока вводится в память программируемого таймера 25, который представляет собой однокристальное программируемое устройство, позволяющее осуществлять запись и хранение шестнадцати временных программ с дискретностью 1 минута. Этого объема памяти достаточно для обеспечения в течение суток четырех сигналов внепикового включения и четырех сигналов запрета работы насосной установки. Визуальный контроль вводимой и уже введенной программ осуществляется с помощью индикатора текущего времени и набора программы 28, который после задания программы используется как индикатор текущего астрономического времени. В запрограммированное время совокупность сигналов с выхода программируемого таймера 25 поступает на вход блока формирования импульса запуска и запрета работы насоса 26 и на его выходе формируется сигнал импульса запуска. Этот сигнал поступает на вход блока внепикового управления электродвигателем 22, который вступает в работу. Он в соответствии со временем, оставшимся до начала времени максимума потребления электроэнергии, анализирует состояние датчиков промежуточных уровней 16 и в случае необходимости выдает сигнал «Пуск1», который через коммутатор 33 (находящийся в положении «Автомат.») блока ручного управления насосной установкой 29 проходит в блок передачи и приема сигналов 20 и далее в блок 8, аналогично описанному выше. Формирование сигнала запрета работы насосов осуществляется по программе, заложенной в программируемый таймер 25, аналогично сигналу импульса запуска. Совокупность сигналов с выхода программируемого таймера 25 позволяет получить на выходе блока формирования импульса запуска и запрета работы насоса 26 сигнал «Запрет работы насосов», который поступает на вход ключа 30, блока ручного управления водоотливной установкой 29. Если ключ 30 находится в положении «Автомат.», этот сигнал через диод 37 проходит на выход блока ручного управления водоотливной установкой. Если переключатель 30 находится в положении «Ручное», то сигнал «Запрет» может быть подан переключателем 31. Сигнал «Запрет работы насосов» поступает на выход блока ручного управления водоотливной установкой 29 и производит действия, аналогичные сигналу «Стоп» от кнопки 36. В аппаратуре ВАВ1.М (рис. 5.11) функции блока управления насосом 1 выполняет субблок управления механизмами (УМ). Таких субблоков в аппаратуре три, в соответствии с количеством управляемых насосов. Функции блока формирования импульсов запуска и останова насосов 8 выполняют субблоки: управления режимами работы (РН), расшифровки неисправностей и резервного питания (РП), проверки функционирования (ПФ). Функции линейного узла 17 и блока приема и передачи сигналов 12 выполняют субблоки: приема управляющих сигналов (КУ) и передачи информации (КИ). Согласование входных сигналов от датчиков и выходных сигналов на исполнительные механизмы по уровню напряжения с сигналами перечисленных блоков осуществляется субблоком ввода-вывода (ВВ). Все перечисленные субблоки входят в состав блока управления насосами БУН.1M, который устанавливается непосредственно у водоотливной установки. Блок управления насосами БУН.1М предназначен для обработки сигналов, поступающих от датчиков и выдачи команд на исполнительные механизмы: заливочный насос НЗП, привод задвижки ПЗ.1М, главный насос, а также для выдачи сигналов в канал передачи информации для представления диспетчеру данных о состоянии водоотливной установки. На переднюю дверь блока управления насосами выведены цепи: – сигнализации о наличии питания; – сигнализации об уровне воды в водосборнике; – сигнализации о работе и неисправности каждого из трех насосов; – сигнализации о работе заливочного насоса; – сигнализации о виде неисправности; – сигнализации о запрете включения насосов; – трех кнопок расшифровки вида неисправности; – двух кнопок имитации верхнего уровня и отсутствия нижнего уровня; – переключателей режимов работы насосов («Автоматическое» – «Местное» – «Отключен 1 насос в цикле» – «2 насоса в параллель» – «3 насоса в параллель»); – переключатель выбора уровня, на который настраивается работа насосов; – кнопки «Установки в "О"»; – кнопки «Установки в "О" триггеров аварии по каждому насосу». Сигнал о работе насоса выводится на переднюю дверь из каждого из трех субблоков УМ. При этом загорается на двери соответствующий работающему насосу светодиод. С выхода субблоков УМ на переднюю дверь поступает сигнал общей аварии, зажигающий соответствующий светодиод. При нажатии кнопки вида неисправности насоса загорается один из пяти (по числу неисправностей) све-тодиодов вида неисправности. Если появилась необходимость включить насос при отсутствии верхнего уровня воды, то используют кнопку-имитатор верхнего уровня. При необходимости отключить насос используют кнопку-имитатор отсутствия нижнего уровня. Если с поверхности подана команда на запрет включения насосов, то на двери включается индикатор «Запрет», который запрещает включение насосов. Функции линейного узла 19 выполняет субблок линейный (ЛВ), блока приема и передачи сигналов 20 – субблок передачи управляющих сигналов (ПУ) и два субблока приема информации (ПИ), блока внепикового управления электродвигателями 22 – субблок внепикового потребления электроэнергии (ВП), блока программируемого таймера 25 и блока формирования импульсов запуска и запрета работы насосов 26 – субблок сигнализации и учета рабочего времени (УВ). Функции блока звуковой сигнализации 23 и блока учета машинного зремени работы насосов 24 выполняет субблок УВ и передняя панель, на которой расположены счетчики времени работы насосов и телефоны для выдачи звуковых сигналов. Функционально передняя панель состоит из блока представления информации 21, блока задания программ 26, индикатора текущего времени и набора программ 28. блока ручного управления водоотливной установкой. Субблоки ЛВ, ПУ, ПИ, ВП, УВ, передняя панель, а также субблок питания СП и субблок вывода информации ВИ входят в состав сигнального табло СТВ.1М. Табло сигнальное водоотлива СТВ.1М предназначено для приема и отображения информации о состоянии водоотливной установки и устанавливается в диспетчерском пункте. Диспетчеру передается следующая информация: – о наличии питания – световая; – о работе контроллера – световая; – о работе каждого насосного агрегата – световая; – о наличии связи с подземной частью – световая; – о виде неисправности на каждом насосном агрегате – световая; – об автоматическом запрете включения насосных агрегатов – световая; – об уровне воды в водосборнике – световая; – советы диспетчеру о включении насосных агрегатов – световая; – о режиме работы каждого насосного агрегата – световая; – о наличии неисправности на каждом насосном агрегате – световая и звуковая: – о наличии аварийного уровня в водосборнике – световая и звуковая; – об общем времени работы каждого насосного агрегата – визуальная; – о текущем времени работы и о программе работы блока внепикового потребления электроэнергии – визуальная. На передней панели сигнального табло расположены элементы, выдающие диспетчеру информацию о состоянии водоотливной установки и элементы, дающие частичную возможность управления насосами. На задней панели расположен силовой трансформатор, предохранители икабельные вводы. Связь между сигнальным табло СТВ.1М и блоком управления БУН.1М осуществляется с помощью канала передачи информации. Канал передачи информации позволяет диспетчеру получать данные о состоянии водоотливной установки, а также дистанционно включать и выключать насосные агрегаты. Канал передачи информации состоит из устройства пункта управления (ПУ), расположенного в помещении диспетчера в сигнальном табло СТВ.1М, устройства контролируемого пункта (КП), расположенного в насосной камере в аппарате БУН.1М и линии связи 18, представляющую собой свободную пару жил телефонного кабеля. Функции устройства ПУ выполняют субблоки ПУ, ЛВ и ПИ. Функции устройства КП выполняют субблоки КУ и КИ. Максимальная дальность передачи сигналов составляет 10 км. Для передачи информации использована система с временным разделением сигналов и пошаговой (тактовой) синхронизацией. Метод передачи -циклический, т.е. сообщения передаются периодически в заданной последовательности. Длительность цикла составляет 1 секунду. Один цикл передачи состоит из 64 тактов. Каждый такт, длительность которого 15 миллисекунд, состоит из двух полупериодов, соответствующих положительному и отрицательному импульсам двухполярного сигнала. Последовательность тактовых импульсов вырабатывается в пункте управления в субблоке ПУ, В субблоке ЛВ они преобразуются в двухполярные импульсы, поступающие в линию связи. Канал передачи информации имеет один линейный источник питания 15 В постоянного тока с искробезопасным выходом, расположенный в пункте управления. В соответствии с требованиями технологического процесса насосы должны иметь возможность работы в автоматическом и ручном режимах. В автоматическом режиме насосы должны работать по следующим схемам: 1. Один насос в цикле. 2. Два насоса одновременно в цикле. 3. Три насоса одновременно в цикле. При этом обеспечивается возможность работы от любого из трех уровней (верхнего, повышенного или аварийного) с разносом во времени включения и отключения насосов на водопроводы как с задвижками, так и без них. Аппаратура обеспечивает также последовательную работу насосов с разносом во времени при их количестве более трех. На примере схемы подключения аппаратуры ВАВ.1М (рис. 5.11) рассмотрим работу аппаратуры в следующих условиях: аппаратура работает в автоматическом режиме, работает один насос в цикле, включение насосов происходит при достижении воды в водосборнике верхнего уровня. Эти условия выбираются с помощью переключателей, расположенных на передней двери блока БУН.1М.
рис. 5.11 Комплект аппаратуры ВАВ.1М При заполнении водосборника вода, поднимаясь, контактирует с поверхностью электродного датчика верхнего уровня ВУ, тем самым замыкается входная цепь оптрона V14 субблока ввода-вывода ВВ по цепи: «плюс» источника питания 12 В (клемма ХТ1:3 блока питания БП5.12) – клемма ХТ7:5 БУН.1М – входной диод оптрона V14 - клемма ХТ1:9 – датчик ВУ – вода -земля – «минус» источника питания 12 В (клемма ХТ1:4 блока питания БП5.12). В субблоке ВВ формируется сигнал, гальванически развязанный с входным сигналом, о наличии верхнего уровня и подается в субблок расшифровки неисправностей и резервного питания РП (на схеме не показан). При этом в субблоке РП формируются два сигнала: сигнал включения заливочного насоса, который через оптрон VI субблока ВВ поступает на пускатель ПВИ-63БТ, и сигнал таймера-времени, необходимого для создания заливочным насосом давления в главном насосе. Если за время 3 – 5 минут необходимое давление заливочным насосом не создано, то насос выходит на аварию по отсутствию давления. При включении пускателя заливочного насоса замыкается его блок-контакт (клеммы 5 – 7) и поступает сигнал на входной диод оптрона VI субблока передачи информации КИ. Если заливочный насос создал необходимое давление, то замыкается контакт реле давления РДВ.1М и поступает сигнал на входной диод оптрона V1 субблока управления механизмами УМ. Программа, заложенная в электрически программируемых матрицах субблока УМ, такова, что при наличии сигналов включения насоса и наличия давления формируются команды на открывание задвижки и на включение высоковольтной ячейки РВД6, которая подает питание на двигатель главного насоса. Команда на включение высоковольтной ячейки через оптрон V2 субблока ВВ подается на выходную клемму ХТЗ:4 блока БУН.1М, а затем на клемму 1 разъема ХТ2 блока развязки искробезопасных цепей БРЦ. Блок БРЦ служит для гальванической развязки искробезопасных цепей блока БУН.1М с искроопасными цепями управления высоковольтной ячейки. Блок БРЦ представляет собой 9 ячеек, собранных на основе оптронов АОТ 128А. При поступлении отрицательного сигнала на клемму 1 замыкается входная цепь оптрона V1. Плюс источника питания поступает на клемму. 4. Выходной транзистор оптрона открывается, а значит, откроется и транзистор VT1. Через клемму XT1:1, предохранитель FU1, диод VD1, открытый транзистор VT1, клемму ХТ1:2 замыкается цепь реле управления РУ высоковольтной ячейки РВД6. Согласно программе в течение 10 секунд производится контроль включения высоковольтной ячейки. Для подачи в блок БУН.1М сигнала о включении высоковольтной ячейки используется ее нормально разомкнутый блок-контакт БлК4. При включении ячейки блок-контакт замыкается и подает переменное напряжение от трансформатора высоковольтной ячейки на выпрямительный мост VD4 блока БРЦ. Отрицательный потенциал выпрямленного напряжения с диодного моста VD4 поступает на вход оптрона V4 и замыкает его выходные цепи. Выходной транзистор оптрона V4 открывается и замыкает цепь подачи сигнала о включении высоковольтной ячейки. С клеммы ХТ2:5 блока БРЦ сигнал поступает через клемму XT1:20 блока БУН.1М на входной диод оптрона V4 субблока УМ. Если в течение 10 секунд сигнал о включении высоковольтной ячейки в субблок УМ не поступил, то насос выходит на аварию по неисправности высоковольтной ячейки. Команда на открывание задвижки через оптрон V3 субблока ВВ подается на выходные клеммы ХТЗ:7, ХТЗ:8 блока БУН.1М, а затем через переключатель цепей управления ПЦУ4.1М, контакты привода задвижки КВО и В А на пускатель ПРА1. В пускателе срабатывает промежуточное реле К1, так как его обмотка шунтируется диодом, расположенным в субблоке ВВ, и включается контактор КМ1, подающий питание на электродвигатель задвижки. При полностью открытой задвижке размыкается контакт концевого выключателя привода задвижки КВО и пускатель ПРА1 отключается. Если во время запуска главного насоса задвижка не открывается, то насос выходит на аварию по при чине заклинивания задвижки. На такой же вид аварии выходит насос, если задвижку заклинило при ее закрывании. После запуска насоса, в течение 90 – 120 секунд контролируется его производительность. Если в течение этого времени насос не набрал нужной производительности и реле РГТН.1М не замкнуло свой контакт, то насос выходит на аварию по производительности. Когда насос откачает воду из водосборника ниже датчика нижнего уровня НУ, то разрывается входная цепь оптрона V15 субблока ВВ. При этом в субблоках РН и УМ формируется сигнал на закрытие задвижки, который поступает в субблок ВВ. Команда на закрытие задвижки через оптрон V4 подается на выходные клеммы ХТЗ:10, ХТЗ:11 блока БУН.1М, а затем через переключатель цепей управления ПЦУ4.1М, контакты привода задвижки КВЗ и пускателя ПРА1. Задвижка закрывается, и за 1,5 – 2 оборота до полного закрытия контактом концевого выключателя разрывается цепь управления высоковольтной ячейки двигателя главного насоса. При полностью закрытой задвижке размыкается контакт концевого выключателя привода задвижки КВЗ и пускатель ПРА1 отключается. В случае если в подшипниках насоса создается температура выше допустимой (+ 70° С). то срабатывает термодатчик ТДЛ.1М, исчезает сигнал на входном оптроне V3 субблока УМ и насос выходит на аварию по температуре. При выходе любого насоса на аварию включается следующий по очередности включения насос. Для работы в режиме местного управления переключатель SА1 в блоке БУН.1М устанавливается в положение «М». При этом для управления заливочным насосом используется кнопочный пост управления КУ92, для управления высоковольтной ячейкой – пост ПУ РВД6, для управления приводом задвижки – кнопочный пост КУ93.
Комплекс унифицированной аппаратуры типа КАВ.Комплекс унифицированной аппаратуры автоматизации шахтных водоотливных установок КАВ предназначен для автоматического управления рудничным водоотливом – участковым, проходческим, главным. Область применения комплекса охватывает все многообразие водоотливных установок, встречающихся в настоящее время на шахтах и рудниках. Универсальность комплекса позволяет заменить им все выпускаемые в настоящее время комплекты аппаратуры автоматизации рудничных водоотливных установок. Комплекс КАВ по сравнению с другими видами аппаратуры автоматического управления водоотливными установками обладает значительными преимуществами: – бесконтактное исполнение логической части комплекса на основе использования наиболее прогрессивной элементной базы интегральных микросхем, что создает предпосылки для увеличения межремонтных и профилактических сроков обслуживания, надежности и срока службы аппаратуры; – прогрессивность технологии изготовления устройств ввода и обработки информации и возможность применения высокопроизводительного оборудования для массового производства; – блочный принцип построения аппаратуры, обеспечивающий применение типажного унифицированного ряда субблоков. Комплекс КАВ позволяет автоматизировать водоотливы с числом насосных агрегатов от одного до десяти, обеспечивает автоматическую работу агрегатов рудничного водоотлива в зависимости от уровня воды в водосборнике, а также местное и дистанционное управление. Предусмотрены возможность автоматизации комплексом различных технологических схем водоотлива, любой способ заливки главных насосов перед пуском, работа с управляемыми задвижками (до двух на один насос) как с электро-, так и с гидроприводом. При аварийном отключении работающего насоса предусмотрено автоматическое включение резервного насоса. Обеспечиваются последовательные пуск и остановка параллельно работающих насосных агрегатов. Предусмотрены защиты и автоматическое отключение насосных агрегатов при срабатывании гидравлических или тепловых контрольных датчиков, а также при неисправностях пусковой аппаратуры. Информация о работе водоотливной установки на пульт диспетчера поступает по двухжильному кабелю. Аппаратура КАВ обеспечивает: – автоматическое управление насосными агрегатами по уровню воды в водосборнике; – местное (ручное) управление отдельными агрегатами во время наладочных и ремонтных работ; – перевод на местное управление насосных агрегатов без нарушения работы остальных в автоматическом режиме; – возможность при наличии трех свободных жил кабеля дистанционного (от диспетчера) управления насосными агрегатами, настроенными на работу от верхнего уровня. Дистанционный пуск и останов насосов предусмотрены для случаев необходимости подачи воды для технических нужд, для снижения нагрузки на электроподстанцию, при разрыве напорного трубопровода и др; – последовательность включения с выдержкой времени электродвигателей насосных агрегатов, настроенных на работу от одного и того же уровня, что исключает одновременное их включение при достижении водой в водосборнике заданного уровня; – включение одного или нескольких насосных агрегатов (в зависимости от настройки) при верхнем уровне воды в водосборнике; -дополнительное включение одного или нескольких насосных агрегатов при повышенном уровне воды; – дополнительное включение одного или нескольких насосных агрегатов при аварийном уровне воды; – включение резервного насоса, настроенного на работу от аварийного уровня при отключении за неисправностью одного из насосных агрегатов, работавшего в автоматическом режиме; – отключение насоса при включении его от диспетчера в момент достижения водой нижнего уровня, а также дистанционное отключение при уровне воды ниже верхнего; – дозирование заливки по времени и контроль включения насосов по времени и давлению; – обеспечение защиты: гидравлической по расходу воды, от нагрева подшипников, от заклинивания задвижек; – автоматическое отключение насосного агрегата при срабатывании гидравлической или тепловой защиты, исчезновении напряжения в цепях управления, срабатывании защиты, предусмотренной пусковой аппаратурой; – невозможность повторного включения неисправного насосного агрегата без вмешательства обслуживающего персонала; – обеспечение сигнализации у диспетчера: о питании табло светового, работе насосных агрегатов, неисправности насосных агрегатов, аварийном уровне и т. д. Агрегатное построение аппаратуры технических средств комплекса позволяет изменять комплектацию комплекса в соответствии с типом технологической схемы водоотлива. В зависимости от условий применения комплекс КАВ изготовляется в 12 модификациях, приведенных в табл. 5.2.
Таблица 5.2. Модификации КАВ.
.Обладая функциональными возможностями лучших образцов серийно изготавляемой аппаратуры автоматического управления насосными агрегатами комплекс КАВ обеспечивает: – расшифровку неисправностей по контролируемым параметрам; возможность работы с бесконтактным датчиком без дополнительных согласующих устройств; – контроль пусковой аппаратуры насосного агрегата; возможность координируемой работы любого числа насосов, входящих в насосную установку; – согласование работы водоотливных установок, расположенных на разных горизонтах; – управление работой насоса системы принудительной смазки подшипников водоотливного агрегата. Комплекс является унифицированной дискретной автоматической системой управления рудничным водоотливом по заданному алгоритму функционирования, который определяется технологической схемой откачки воды из рудника. Алгоритм функционирования включает выполнение логических и временных зависимостей и оперативное запоминание информации. Может осуществляться программная перестройка алгоритма.
Работа комплекса. Блок-схема комплекса КАВ показана на рис. 5.12.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 664. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |