|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
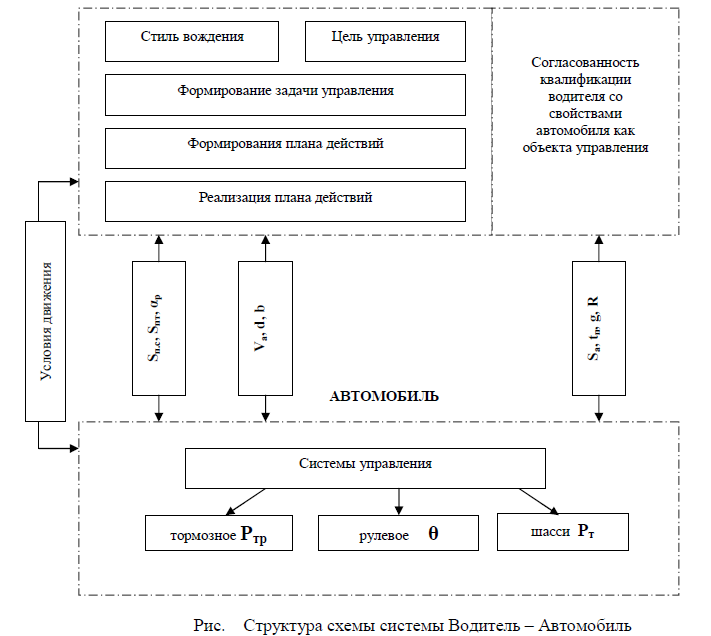
Структурная схема водитель-автомобиль (ВА)
Рассмотрим структурную схему системы ВА. Исходя из цели управления и условий движенияводитель формирует задачу, выбирает маршрут движения, определяет способ решения задачи(максимальная средняя скорость, максимальная эффективность, максимальная надежность). Наформирование задачи большое влияние оказывает свойственный водителю стиль вождения(агрессивно-самоуверенный, спокойный и уверенный, неуверенный). В соответствии споставленной задачей формируются планы действий в складывающихся дорожно-транспортныхситуациях (ДТС): определяются скорость Va, дистанция d и интервал b. На выбор плана действийвлияют мастерство водителя, свойства автомобиля, дорожные условия. Реализация плана действийвыражается в перемещении органов управления автомобилем. В результате таких перемещенийпараметры движения автомобиля изменяются: перемещение педали скорости Sпс с вызывает изменениетяговой силы Рт, что приводит к изменению скорости автомобиля Va.. Перемещение педали тормоза Snт создает тормозную силу Ртр, вызывающую замедление движения, которое изменяет скоростьавтомобиля. Поворот рулевого колеса αр приводит к повороту управляемых колес на угол θ, т.е.вызывает появление поперечного ускорения jy, что изменяет траекторию движения. При возникновении курсовой неустойчивости (заноса) или опасности опрокидывания водителюдополнительно приходится стабилизировать неустойчивость автомобиля. В этом случае задача,стоящая перед водителем, усложняется, а надежность управления снижается.
Результат регулирования параметров движения автомобиля в виде скорости vа, дистанции d иинтервала b воспринимается водителем, т. е. является информацией обратной связи, и сравниваетсяс планом действий. При наличии рассогласования между планом и результатом водитель производиткоррекцию параметров движения автомобиля для устранения возникшего рассогласования. В частности, водитель непрерывно корректирует отклонение автомобиля от выбранной траекториидвижения.  Результат управления автомобилем в виде пройденного пути Sa, времени поездки tn, расходатоплива gs, надежности управления автомобилем R является информацией обратной связи, наосновании которой водитель принимает решение о необходимости внесения изменений в задачууправления. Предельные условия, при которых система ВА в состоянии функционировать с требуемойточностью, определяется функциональными свойствами автомобиля: скоростными, тормозными и устойчивостью. Они определяют максимальные величины ускорений, которые можно реализоватьпри разгоне, торможении и криволинейном движении. Другая группа свойств, называемыхэргономическими, характеризует удобство управления автомобилем и влияет на возможностьреализации его функциональных свойств. Чем выше эргономичность автомобиля, тем надежнееуправление им в критических ситуациях. На первый взгляд кажется очевидным, что создание автомобилей с высокими функциональнымии эргономическими свойствами решает проблему безопасности. В действительности все оказалосьсложнее. Да, улучшая автомобиль, мы расширяем границы пределов, в которых можно обеспечитьустойчивость управления автомобилем. Но как только водитель ощущает расширение границ безопасности, он меняет план своих действий и опять приближается к границам устойчивогодвижения. Человек не может абсолютно точно определить эти границы. Когда параметры плана действийблизки к ним, водитель легко выходит за границы безопасности. Поэтому причиной 85... 90 % ДТПявляются ошибки, допущенные водителем при выборе плана действий, т.е. ошибки водителясвязаны с неправильным выбором скорости, дистанции и интервала движения, неправильнойоценкой возможности смены полосы, выезда на встречную полосу движения. И только в 10... 15% случаев причиной ДТП являются ошибки выполнения маневра по выходу из нештатной(критической) ситуации. Как результат этого, легковые автомобили попадают в ДТП в 2 раза чаще, чем автобусы, и в 1,5 разачаще, чем грузовые автомобили. Движение автомобиля при этом является неравномерным — с интенсивными разгонами и замедлениями. В действительности показателем мастерства являетсяравномерность движения, умение доехать до пункта назначения с оптимальной средней скоростьюпри минимальном расходовании топлива и ресурса автомобиля. |
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 802. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |