|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Определение закона управления, обеспечивающего требуемое качество регулирования. ⇐ ПредыдущаяСтр 6 из 6 Последовательность решения будет аналогична предыдущим примерам. Найдём значение динамического коэффициента Rд= ∆Умах/ У(∞), Из исходных данных имеем ∆Умах= 3,10С. Отсюда Rд= 5,4/10= 0,54. По значениям τз/Т = 0,345 и Rд= 0,54 на графике рис.10 находим закон управления (ЗУ). В данном случае выбираем ЗУ- «П». Таким образом, в состав ЗУ входит только пропорциональная, составляющая, т.е. он имеет вид U(t)= к εε(t), где U(t)-управляющее воздействие регулятора; ε(t)- ошибка регулирования; к ε – параметр закона управления. Выбранный закон обеспечивает выполнение условия (10). Теперь необходимо проверить будет ли выполняться требование по длительности процесса регулирования, т.е. выполнение условия (11). Из исходных данных Трмах =300с. По графикам рис.11 находим, что Тр / τ з =6,2. Отсюда Тр=9,1 τ з =287,6с. Не трудно видеть, что условие (11) выполняется. Ввиду того, что объект является статическим, а в законе управления отсутствует интегральная составляющая необходимо произвести проверку на точность в установившемся режиме. По отношению Т / τ з =0,345 и рис.12 определим, Уост/У(∞) =0,32. Отсюда Уост= 3,20С. Ошибка, которую будет иметь система в установившемся режиме меньше максимально допустимого значения. Требования по точности, т.е. условие (12), выполняется.
5.2.2. Моделирование процессов регулирования, происходящих в спроектированной АСР, на ПЭВМ с последующей коррекцией параметров регулятора.
Для моделирования на ПЭВМ спроектированной АСР предлагается использовать компьютерную программу «СИАМ». Следует отметить, что осуществление синтеза регулятора с помощью этой программы несколько затруднительно. Это связано с необходимостью перебора множества значений параметров регулятора с целью нахождения таких , которые соответствовали бы заданным показателям качества. Поэтому в данном проекте предлагается эту программу применить только для проверки результатов, полученных графоаналитическим методом, а также с целью уточнения их значений.  Проверка и коррекция значений параметров регулятора производится по следующим этапам: 1. Моделируется на ЭВМ сконструированная система, т.е. набирается её структурная схема. Объект регулирования при этом описывается апериодическим звеном второго порядка Т1, Т2 и Коб, значения которых берётся из задания на проектирование. Если в законе управления присутствует интегральная составляющая («ПИ» или «ПИД»), то в структурной схеме регулятора она может быть представлена в виде последовательности интегрирующего (ИЗ) и форсирующего (ФЗ) звеньев (рис.15а). При этом коэффициент ИЗ берётся равным Ки= 1/Т и, а постоянная времени ФЗ – равной Ти (Табл.2). Если был выбран закон ПИД, т.е. кроме интегральной составляющей имеется и производная, то последняя реализуется в виде ФЗ (Рис 15б) с постоянной времени Тд (Табл.2). В случае выбора «П»- регулятора, его структурная схема представляет собой просто усилительное звено с коэффициентом Кр. Модель объекта будет такой же, как и при других законах.
а)
б) Рис. 15. Структурные схемы АСР: а- структурная схема АСР с «ПИ» регулятором; б- структурная схема АСР с «ПИД» регулятором.
2. Выбирается метод исследования ( рекомендуется использовать метод Кутта-Мерсона) и производятся расчёты переходной функции модели АСР. При этом в качестве входного воздействия выбирается единичное ступенчатое, т.е. с К=1. 3. По окончанию расчётов результат фиксируется в табличной форме или в виде графика процесса регулирования. 4. По полученным табличным (графическим) данным вычисляются показатели качества (∆Y, t р Yост), значения которых сравниваются с заданными в соответствие с формулами (10-12). Если эти неравенства не выполняются, то посредством программы «СИАМ» производится коррекция параметров регулятора. В этом случае для изменения показателей ∆Y и t р варьируют величиной Тд, а для изменения Yост- величиной кр (Рис.15). Подбор считается законченным, при выполнении условий (10-12). После этого делаются выводы о целесообразности применения спроектированной АСР и выполняется обоснование и выбор средств автоматизации, а также разработка спецификации на них.
5.3. Методика расчёта релейного (двухпозиционного) регулятора. 5.3.1. Графоаналитический способ расчёта регулятора
При выборе релейного (двухпозиционного) регулятора (когда τз /Т < 0,2) целью проектирования является определения зоны нечувствительности этого регулятора, обеспечивающую заданное качество регулирования. Требуемое качество определяется максимально допустимыми значениями амплитуды Ам и периода Ткм колебаний. К исходным данным относятся также параметры объекта (Коб, τз, Т) и величина максимального возмущения ∆Q. Параметры объекта регулирования τз, Т являются асимптотическими. Порядок их вычисления показан в подразделе 5.1. Идея проектирования сводится к определению посредством графиков (рис. 16 и 17) значений амплитуды А и периода колебаний Тк. После чего они сравниваются с их заданными допустимыми значениями Ам , Т км . При этом должны выполняться следующие условия.
Тк <Т км ; А <Ам (15)
В случае выполнения этих условий проектирование регулятора считается выполненным. В противном случае, необходимо изменять (уменьшать) зону нечувствительности до тех пор, пока условие (15) не будет выполняться.
Рис 16
Рис. 17
Здесь Хзн- величина зоны нечувствительности. Величину амплитуды колебаний при различных зонах нечувствительности можно определить по графику (рис. 16) зависимости А /(Коб ∆Q) от τз /Т . Зона нечувствительности регулятора Хз.н. дана в виде параметра функции, изменяющегося от 0до 0,1 Коб ∆Q. Из полученной по графику величины отношения А /(Коб ∆Q) можно определить величину амплитуды A. Значение периода колебаний Tк находится из функциональной зависимости Тк / τз от ∆Q (рис. 17). На этом же графике показана функциональная зависимость отношения времени пребывания регулирующего органа в двух крайний положениях Твкл/Твык от величины возмущения ∆Q (изменение нагрузки). Полученные значения показателей качества сравнивают с заданными. Если условие (15) выполняется, то выбор зоны нечувствительности сделан правильно, если же нет, то её необходимо уменьшить. Следует иметь в виду, что уменьшение такой зоны ограничено техническими, надёжностными и стоимостными факторами. Поэтому желательно выбрать её величину максимально возможной, но так, чтобы при этом выполнялось условие (15).
5.3.2. Аналитический метод расчёта регулятора.
Задачу выбора зоны нечувствительности можно осуществить также и аналитическим способом. С этой целью могут быть использованы следующие зависимости амплитуды и периода колебаний от параметров объекта и искомой зоны. А= Хуст-(Хуст-Хзн) е -τз /Т; (16)
Тк=2Т ln {(Хmах+Хуст)/ (Хуст- Хmах)}, (17)
где Хуст- установившееся значение выходной величины, которое она приобрела бы в случае отсутствия автоматического регулировании; Хmах- максимальное значение выходной величины, которое она приобретает в процессе регулирования; Хзн- величина зоны нечувствительности. Хуст= Коб Хвх, (18) где Хвх-входное управляющее вздействие; Коб-коэффициент передачи объекта. Хmах=Хз+А, (19) где Хз- заданное значение регулируемой величины; А – амплитуда колебаний в установившемся режиме. Формулы (16) и (17) справедливы при симметричном отклонении регулируемого параметра Х от своего заданного значения Хз, т.е. при Хmах= Хmin (Рис.18). Здесь, Х- регулируемая величина, Хmin=Хз-А - минимальное значение выходной величины, которое она приобретает в процессе регулирования
Рис.18. Процесс двухпозиционного регулирования.
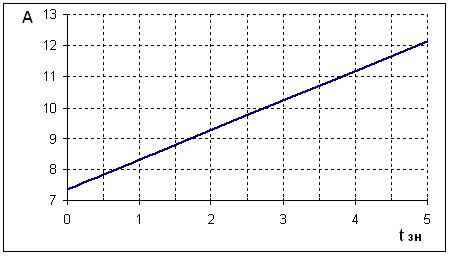
Пример3. Для регулировки температуры объекта используется 2-ух позиционный регулятор. Входное регулирующее воздействие осуществляется посредством подачи напряжения Uвх =220В на тэны. Параметры объекта: τз=2мин, Т=42мин, Коб=0,72 град/В. Требования к режиму и качеству регулирования: tз=700С, Ам=80С , Ткм.=90с. Решение: 1. Находим отношение τз/Т=0,048<0,2. Следовательно, для процесса стабилизации температуры выбираем 2-ух позиционный регулятор. 2. Определим установившееся значение температуры нагрева объекта при условии отсутствия регулятора в соответствии с формулой (18) tуст. = Коб Uвх=0,72 * 220=158,04 3. По формуле ( 16) вычислим значение амплитуды А колебаний температуры в установившемся режиме. При этом примем, что зона нечувствительности составляет 5 градусов. Тогда получим А= tуст-(tуст-tзн) е -τз /Т = 120,134С. Из полученного результата видно, амплитуда колебаний превышает допустимое значение (Ам=80), т.е. не выполняется условие (15). Варьируя значением зоны нечувствительности tзн найдём такое, при котором указанное условие будет выполняться. С этой целью построим график зависимость А= F(tзн) в виде графика (Рис.19) и таблицы 3.
Рис. 19. График зависимости амплитуды А от зоны нечувствительности tзн . Табл. 3
Не трудно видеть, что при значении tзн=0,50С наступает требуемое неравенство (А=7,8 < Ам=8). Дальнейшее уменьшение зоны приведёт к снижению надёжности регулятора. Поэтому, с точки зрения выполнения условия обеспечения требуемого значения амплитуды, величину зоны можно принять равной 0,5. Вместе с тем необходимо проверить также значение периода колебаний на выполнение условия (15). Используя формулу (17), найдём значение этого периода в установившемся режиме. При этом будем считать, что tзн=0,5. Тк=2Т ln {(tмах+tуст)/ (tуст- tмах)}=89,23с. Таким образом, и здесь условие (15) также выполняется. Следовательно, можно сделать вывод, что регулятор, обладающий зоной нечувствительности tзн=0,5, отвечает поставленным выше требованиям к качеству регулирования. |
||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 320. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |