|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Композиция трехмерных преобразованийПутем объединения элементарных трехмерных преобразований можно получить другие преобразования. В этом разделе показано, как это сделать. Задача состоит в том, чтобы преобразовать отрезки P1P2 и P1P3 (рис. 2.5) из начальной позиции в конечную. Точка Pi переносится в начало координат, P1P2 располагается вдоль отрицательной полуоси x, а P1P3 помещается в плоскости yz в той ее половине, где ось у положительна. На длины отрезков преобразование не воздействует. Как и прежде, разобьем сложную задачу на более простые. В данном случае преобразование можно выполнить за четыре шага: 1. Перенос точки Pi в начало координат. 2. Поворот вокруг оси у до совмещения P1P2 с плоскостью уz. 3. Поворот вокруг оси x до совмещения P1P2 с отрицательной полуосью Z. 4.
Шаг 2. Поворот вокруг оси у. На рис. 2.5 показаны отрезки P1P2 после шага 1 и проекция P1P2 на плоскость xz. Поворот производится на положительный угол θ, для которого
Как и ожидалось, x-компонента Р2 равна нулю.
Рис. 2.5. Композиция преобразований
Запись обозначает длину Результатом поворота на шаге 3 является
т. е. теперь совпадает с отрицательной полуосью z. Шаг 4. Поворот вокруг оси z. На рис. 2.6 показаны  Р2'" лежит на отрицательной полуоси z, а Р3'" - в точке
Поворот производится на
Рис. 2.6. Окончание композиции преобразований Преобразование объектов Преобразование объектов можно описать так. Пусть любая точка, принадлежащая определенному объекту, имеет координаты (k1, k2,..., kn ) в n-мерной системе координат. Тогда преобразование объекта можно определить как изменение положения точек объекта. Новое положение точки пространства соответствует новым значениям координат (т1, т2,..., тn). Соотношение между старыми и новыми координатами для всех точек объекта (т1, т2,..., тn) = F(k1, k2,..., kn ) и будет определять преобразование объекта, где F—функция преобразования. Классифицировать преобразования объектов можно согласно типу функции преобразования и типу системы координат. Например, преобразование объектов на плоскости можно определить так:
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-11; просмотров: 559. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |






 где
где и
и  после шага 3, когда
после шага 3, когда
 положительный угол , для которого Шаг 4 является последним шагом, после которого получается конечный результат, показанный на рис. 2.6. Результирующая матрица
положительный угол , для которого Шаг 4 является последним шагом, после которого получается конечный результат, показанный на рис. 2.6. Результирующая матрица описывает искомое преобразование, где
описывает искомое преобразование, где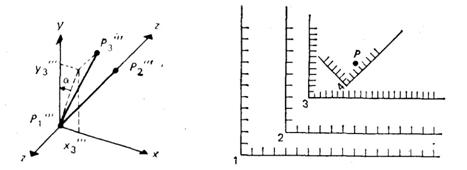
 В трехмерном пространстве:
В трехмерном пространстве: