|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Классификация грузоподъемных машинСтр 1 из 55Следующая ⇒ МИНИCTEPCTBO ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное автономное образовательное учреждение Высшего образования «СЕВЕРО-КАВКАЗСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
ЭЛЕКТРОННЫЙ КУРС ЛЕКЦИЙ ПО ДИСЦИПЛИНЕ «ПОДЪЕМНО-ТРАНСПОРТНЫЕ ОБОРУДОВАНИЕ ПРЕДПРИЯТИЙ» Для магистров направления подготовки 23.04.03 «Эксплуатация транспортно-технологических машин и комплексов» Профиль «Техническая эксплуатация автомобилей» Квалификация выпускника – магистр Форма обучения – очная Изучается во 2 семестре Автор: доцент кафедры «Техническая эксплуатация автомобилей» Сербин Виктор Михайлович
Ставрополь, 2018 Лекция № 1 (2 часа) ОБЩИЕ СВЕДЕНИЯ О грузоподъемных МАШИНАХ План лекции
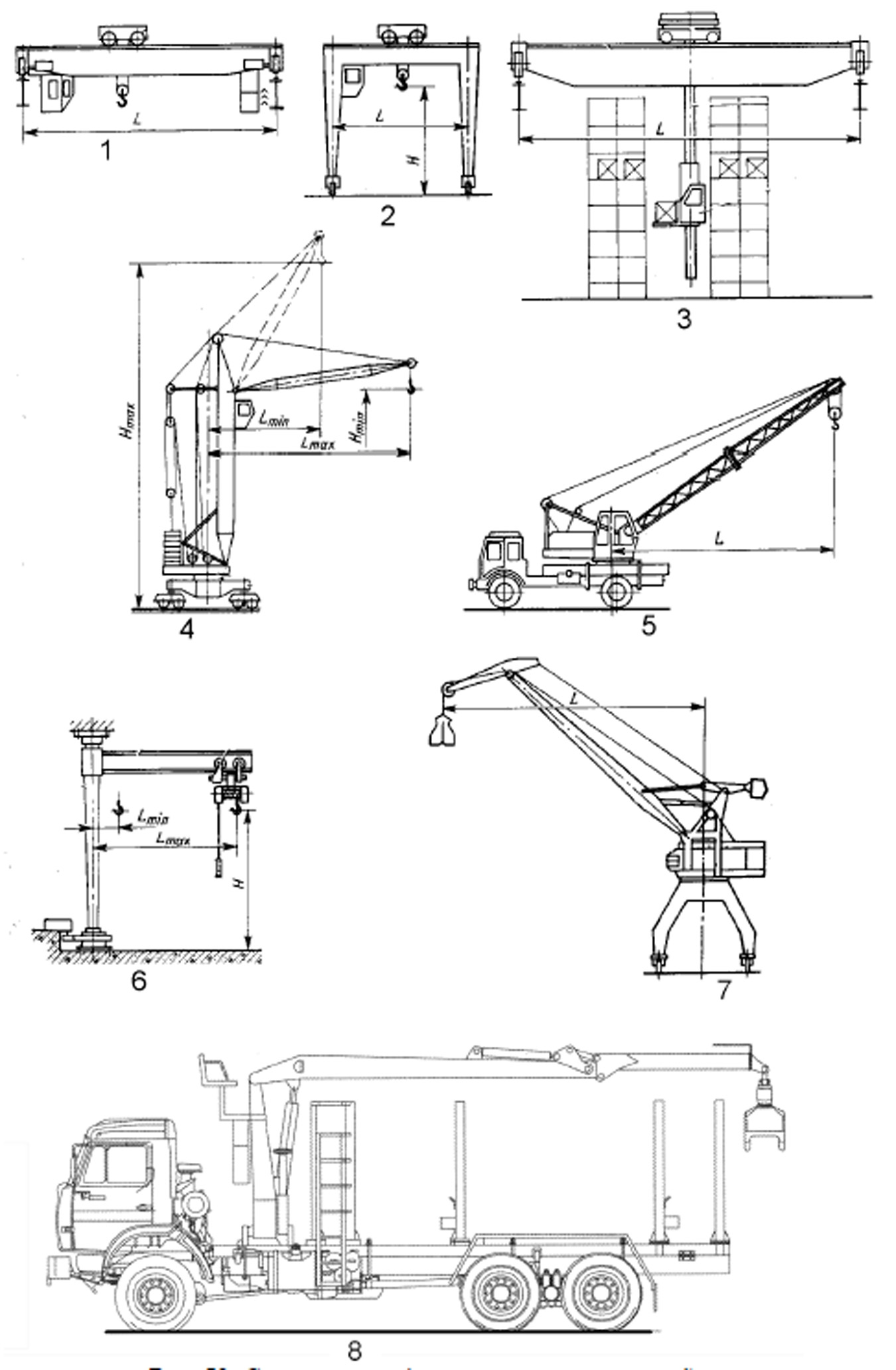
ВВЕДЕНИЕ. 1.1 Краткая история становления и развития грузоподъемных машин. 1.2 Основные требования к ГПМ. 1.3 Классификация грузоподъемных машин. 1.4 Характеристики грузоподъемных машин. 1.5Режим работы грузоподъемных машин. ВВЕДЕНИЕ Снижение объема ручныхпогрузочно-разгрузочных работ, исключение тяжелого ручного труда при выполнении основных и вспомогательных производственных операций, комплексная механизация и автоматизация производственных процессов во всех областях промышленного производства невозможна без использования широкого комплекса подъемно-транспортных машин. Современные поточные технологические и автоматизированные линии, межцеховой и внутрицеховой транспорт, погрузочно-разгрузочные операции на складах и перевалочных пунктах органически связаны с применением разнообразных типов подъемно-транспортных машин и механизмов, обеспечивающих непрерывность и ритмичность производственных процессов. Поэтому применение данного оборудования во многом определяет эффективность современного производства, а уровень механизации технического производства – степень совершенства и производительность предприятия.  Грузоподъемными машинами называют самоходные или стационарныегрузоподъемные машины цикличного действия, которые предназначены дляподъема и перемещения грузов и людей. Понятие «грузоподъемные машины» распространяется на грузоподъемные краны всех видов, подъемники илифты (рисунок 1.1). Рисунок 1.1–Схемы грузоподъемных кранов различной конструкции: 1– кран мостовой; 2 – кран козловый; 3 – кран-штабелер; 4– кран башенный;5 – крана стреловой автомобильный; 6 – кран консольный на колонне;7– кран портальный; 8 – кран-манипулятор на автомобиле
Лекции по изучению грузоподъемных машин предназначены для широ- кого круга направлений подготовки студентов.Они преследует цель познакомить будущих бакалавров и магистров с принципиальной конструкцией наиболее распространенных грузоподъемных машин, их назначением, методами расчета и определения основных параметров, которыми они должны оперировать в практической деятельности, знатьвозможности применения тех или иных грузоподъемных машин. Изучение этой дисциплины основывается на знании студентами общетехнических дисциплин: теоретической механики, сопротивление материалов, теории машин и механизмов, деталей машин и др.
Краткая историястановленияи развития грузоподъемных машин Начало применения грузоподъемных и транспортирующих машин относится к глубокой древности. Сохранившиеся до наших дней памятники материальной культуры свидетельствуют о том, что простейшие грузоподъемные устройства – рычаги, рычажные подъемники («журавли»), катки, подъемные вороты, наклонные плоскости (пандусы) – были известны человеку с глубокой древности. Это было связано с общим развитием цивилизации и возникавшими практическими задачами в области строительства, горного дела, военной техники и т. д. При строительстве пирамиды Хеопса высотой 147 м (2200 лет до н. э.), использовались каменные блоки массой до 90 т. При их перемещении и подъеме использовалось разнообразное подъемно- транспортное оборудование. Строительство длилось около 20 лет, и в нем было занято около 100 тыс. человек. В древнем Египте и Китае использовались указанные выше приспособления, а также водоподъемники, аналогичные современным ковшовым элеваторам. Архимедом был изобретен винт, являющийся прототипом современного винтового конвейера. В летописях 11-го века упоминается о применении на Руси блоков, деревянных воротов, полиспастов и других устройств, при строительстве храмов и подъеме колоколов. В 1668 г. на звонницу Московского Кремля был поднят царь-колокол массой свыше 130 т. Около 250 лет назад в Петербург был доставлен каменный монолит массой около 1000 т для памятника Петру I. Его перемещали на деревянных брусьях с желобами, внутри которых находились большие бронзовые шары. В 1832 г. на Дворцовой площади был поставлен Александрийский столп массой в 600 т. Для его подъема использовались 60 воротов. В 1861 г. русским инженером А. Лопатиным был изобретен ленточных конвейер, применявшийся на золотых приисках Сибири. Наиболее интенсивно новые конструкции ПТМ в России и за рубежом разрабатывались во второй половине 19 века. Как следствие в 1872 г. был издан «Курс подъемных машин», написанный профессором И. А. Вышеградским, который говорил «…кто умеет строить краны, тот любую машину может построить». В конце 19 и начале 20 века научная литература по ПТМ обогатилась работами профессора Н. П. Петрова, А. М. Самуся и других. В настоящее время используются учебники и учебные пособия, написанные известными учеными: А. О. Спиваковским, Н. Ф. Руденко, В. К. Дьячковым, М.П.Александровым и др. В 1930 г. в СССР был создан ВНИИПТмаш – Всесоюзный научно-исследовательский институт подъемно-транспортного машиностроения, который сейчас под аббревиатуройОАО НПО «Всесоюзный научно-исследовательский институт подъемно-транспортного машиностроения» (ВНИИПТМАШ), является головным отраслевым институтом по проектированию подъемно-транспортного оборудования в России.
Основные требования к ГПМ Лучшим образцам грузоподъемных машин должны быть свойственны следующие качества: - надежность, выражаемая отношением фактического времени исправной работы машины между ремонтами к запланированному времени; - долговечность, т. е. безотказная работа в нормальных условиях эксплуатации (при выполнении плановых ремонтов) без разрушения машины от износа до установленного срока погашения ее стоимости; - минимальная материалоемкость, что достигается рациональным проектированием и применением высококачественных сортов металла; - простота конструкции и удобство в управления; - минимальный удельный расход энергии; - удобство ремонта, т. е. простота монтажа и демонтажа при замене деталей и узлов; - широкое внедрение автоматики как средства, облегчающего труд и повышающее эффективность работы машины; - максимальное использование стандартных, унифицированных и нормализованных деталей и узлов машин.
Классификация грузоподъемных машин Грузоподъемные краны можно классифицировать по нескольким при-знакам: 1) по принципу расположения транспортируемого груза: - в пределахопорного контура – краны пролетного типа; - за пределами опорного контура– краны консольного типа; 2) по назначению: краны строительные, краны промышленных предприятий, краны перегрузочные, краны морские, краны-трубоукладчики, краны-манипуляторы, краны-штабелеры; 3) по типу металлоконструкции: мостовые, стреловые, башенные, портальные, мачтовые, кабельные; 4) по возможности перемещения: стационарные, передвижные, ползучие, самоходные; 5) по конструкции ходового устройства: рельсовые, гусеничные, пневмоколесные, плавучие, канатные, шагающие; 6) по возможности поворота: поворотные, неполноповоротные, неповоротные; 7) по расположению крана относительного рельсового пути: опорные иподвесные; 8) по виду привода: с ручным, электрическим, гидравлическим, механическим от ДВС, комбинированным – электрогидравлическим, гидромеханическим; 9) по виду грузозахватного устройства: крюковые, грейферные, магнитные, спредерные (автоматический захват контейнеров).
|
||
|
|
Последнее изменение этой страницы: 2018-04-12; просмотров: 1728. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |