|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
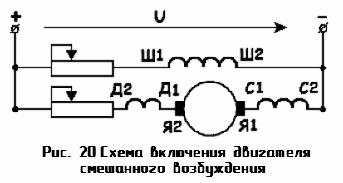
Схема подключения двигателей постоянного тока к сети
Кроме обмотки якоря с выводами Я1 и Я2 и при смешанном возбуждении шунтовой (Ш1 и Ш2) и сериесной (С1 и С2) обмоток в двигателях средней мощности, как правило, имеется обмотка добавочных полюсов (Д1 и Д2). Добавочные полюсы располагаются между основными и служат для ослабления магнитного потока, создаваемого током обмотки якоря. Этот поток искажает поле основных полюсов и вызывает повышенное искрение под щетками. Влияние тока якоря на магнитное поле машины называется реакцией якоря. Обмотка добавочных полюсов и обмотка последовательного возбуждения (сериесная) главных полюсов включаются последовательно с обмоткой якоря, а обмотка параллельного возбуждения (шунтовая) – на полное напряжение сети. Схема включения двигателя показана на рис. 4.26.
Исполнительные двигатели постоянного тока
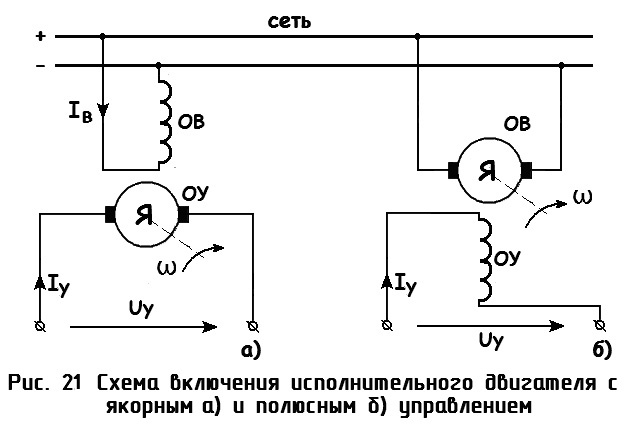
В схемах автоматики, управления, регулирования и контроля применяются двигатели, с помощью которых электрический сигнал (напряжение управления) преобразуются в механическое перемещение, т.е. вращение вала. Такие электрические двигатели называются исполнительными. Исполнительные двигатели имеют две обмотки. Одна из них, которая постоянно подключена к сети, называется обмоткой возбуждения, на другую (обмотку управления) сигнал подается только тогда, когда необходимо вращение вала. От величины напряжения управления зависят вращающий момент и скорость вращения.  В качестве исполнительных двигателей применяются чаще всего двигатели с независимым возбуждением, реже – двигатели с постоянным магнитом. Обмоткой управления может служить либо обмотка якоря (двигатели с якорным управлением, рис. 4.27а), либо обмотка возбуждения (обмотка полюсов – двигатели с полюсным управлением, рис. 4.27б).
Рис. 4.27. Схема включения исполнительного двигателя с якорным (а) и полюсным (б) управлением Тахогенераторы постоянного тока
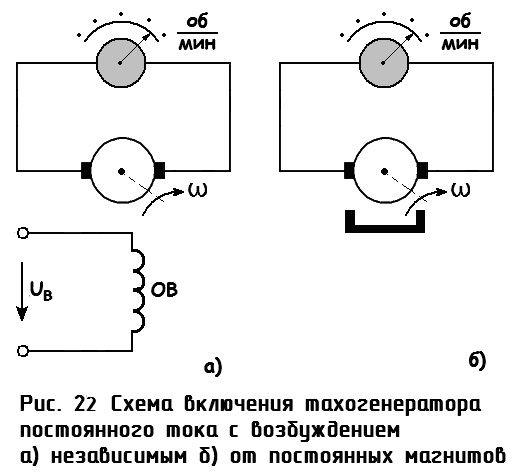
Тахогенератор постоянного тока – машина постоянного тока с независимым возбуждением (рис. 4.28а) или возбуждением постоянными магнитами (рис. 4.28б), работающая в генераторном режиме.
Рис. 4.28. Схема включения тахогенератора постоянного тока с возбуждением: а – независимым; б – от постоянных магнитов
Якорь тахогенератора жестко закреплен на валу, скорость вращения которого требуется измерить, а обмотку якоря подключают, например, к вольтметру. Так как тахогенератор практически работает в режиме холостого хода, то напряжение на его зажимах равно ЭДС, которая, в свою очередь, пропорциональна скорости вращения вала.
|
|||
|
|
Последнее изменение этой страницы: 2018-04-11; просмотров: 1581. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 , поэтому вольтметр непосредственно можно проградуировать в об/мин.
, поэтому вольтметр непосредственно можно проградуировать в об/мин.