|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Анализ работы электродвигателяЭлектродвигатель, создающий вращающий момент, работает на какую-либо механическую нагрузку: рабочую машину РМ, создающую момент сопротивления. В соответствии с аналогом второго закона Ньютона для вращающихся тел
где J – эквивалентный момент инерции всех вращающихся частей электродвигателя и рабочей машины, приведенный к валу двигателя, Если МВР > МС , то ускорение Если МВР < МС , то Если МВР = МС , то Режим работы электропривода, при котором скорость его вращения не изменяется, называется установившимся . Одной из основных задач электропривода является регулирование скорости вращения рабочей машины. Как известно, скорость вращения электродвигателя можно изменить напряжением питания U, магнитным потоком Ф, который изменяется регулировкой тока в обмотке возбуждения, и введением сопротивления в цепь якоря RЦЯ. Кроме того, скорость вращения двигателя изменяется при изменении нагрузки МС . Все эти четыре параметра являются независимыми, т.к. мы их можем изменять по своему усмотрению. При изменении одного из этих параметров будут меняться скорость вращения двигателя ω, ЭДС якоря EЯ , ток, потребляемый двигателем, IЯ и электромагнитный момент МЭМ. Эти четыре параметра являются зависимыми.
Установившийся режим Для определения зависимых параметров в новом установившемся режиме необходимо рассмотреть в первую очередь уравнение механического равновесия, при котором вращающий электромагнитный момент устанавливается автоматически в соответствии с моментом сопротивления рабочей машины 
Затем рассматривается электрическое равновесие – уравнение, составленное по второму закону Кирхгофа, где Например, требуется определить, как изменится скорость вращения двигателя и потребляемый им ток, если ввести сопротивления в цепь якоря. Если другие независимые параметры остаются неизменными, то в соответствии с уравнением механического равновесия электромагнитный момент должен остаться неизменным, следовательно, и ток якоря не должен измениться. Правда, ток якоря восстановится после какого-то переходного процесса, когда он вначале мгновенно уменьшится, а затем примет прежнее значение, возрастая во времени по экспоненциальной зависимости. Если Другой пример. Как будут изменяться ω и IЯ с уменьшением магнитного потока (тока возбуждения)? Так как Рассуждая аналогичным образом, можно определить, что с увеличением напряжения возрастает скорость, а ток якоря , как ни странно, не изменяется, а с увеличением механической нагрузки скорость вращения падает, но возрастает потребляемый якорем ток. Итак, электрическая машина – «добросовестнейшее» устройство. Двигатель развивает такой электромагнитный момент, какой мы создаем на его валу. Изменение любого электрического параметра (напряжения сети, тока возбуждения, сопротивления в цепи якоря) вызывает переходной процесс, после завершения которого устанавливаются новые зависимые параметры (скорость вращения и потребляемый ток), которые обеспечивают создание электрического момента, равного моменту сопротивления на его валу (свойство саморегулирования). Переходный режим
С изменением независимых параметров новый режим устанавливается не мгновенно, а с течением некоторого времени, зависящего от инерционности электрических и механических процессов. Как правило, изменение электрического режима происходит на порядок быстрее, чем изменение скорости вращения двигателя, поэтому инерционностью при изменении электрических процессов можно пренебречь. Например, при увеличении напряжения питания U, т.к. скорость вращения двигателя мгновенно измениться не может и ЭДС обмотки якоря
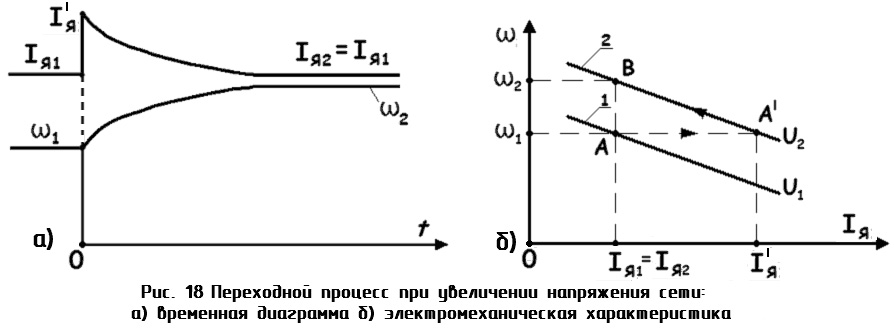
и, следовательно, электромагнитный момент МЭМ. Т.к. момент сопротивления мы не изменяли, то нарушается механическое равновесие и скорость привода возрастает. При этом увеличивается противо-ЭДС и уменьшается ток якоря и электромагнитный момент до тех пор, пока не восстановится механическое равновесие. Увеличение скорости двигателя и восстановление прежнего тока происходят во времени по экспоненциальному закону, плавно приближаясь к новому установившемуся режиму. График изменения тока якоря и скорости вращения показан на
Рис. 4.21. Переходной процесс при увеличении напряжения сети: а – временная диаграмма; б – электромеханическая характеристика
Если известны механические характеристики двигателя при различных напряжениях, то можно количественно определить скорость вращения якоря ω2 в новом установившемся режиме и то, как протекает переходный процесс (см. рис. 4.21б). Пусть режим работы двигателя соответствовал точке А на электромеханической характеристике. При увеличении напряжения до величины U2 ток якоря возрастает до величины I′Я (точка А′) при скорости ω1, которая мгновенно измениться не может. Так как момент сопротивления МС остался прежним, а электромагнитный момент увеличился за счет увеличения тока, то скорость будет постепенно возрастать и в точке В наступит новый установившийся режим, при котором ω2 > ω1, IЯ1 = IЯ2. Другой пример. При включении добавочного сопротивления в цепь якоря скорость двигателя мгновенно измениться не может, поэтому ЭДС якоря в момент коммутации останется прежней (
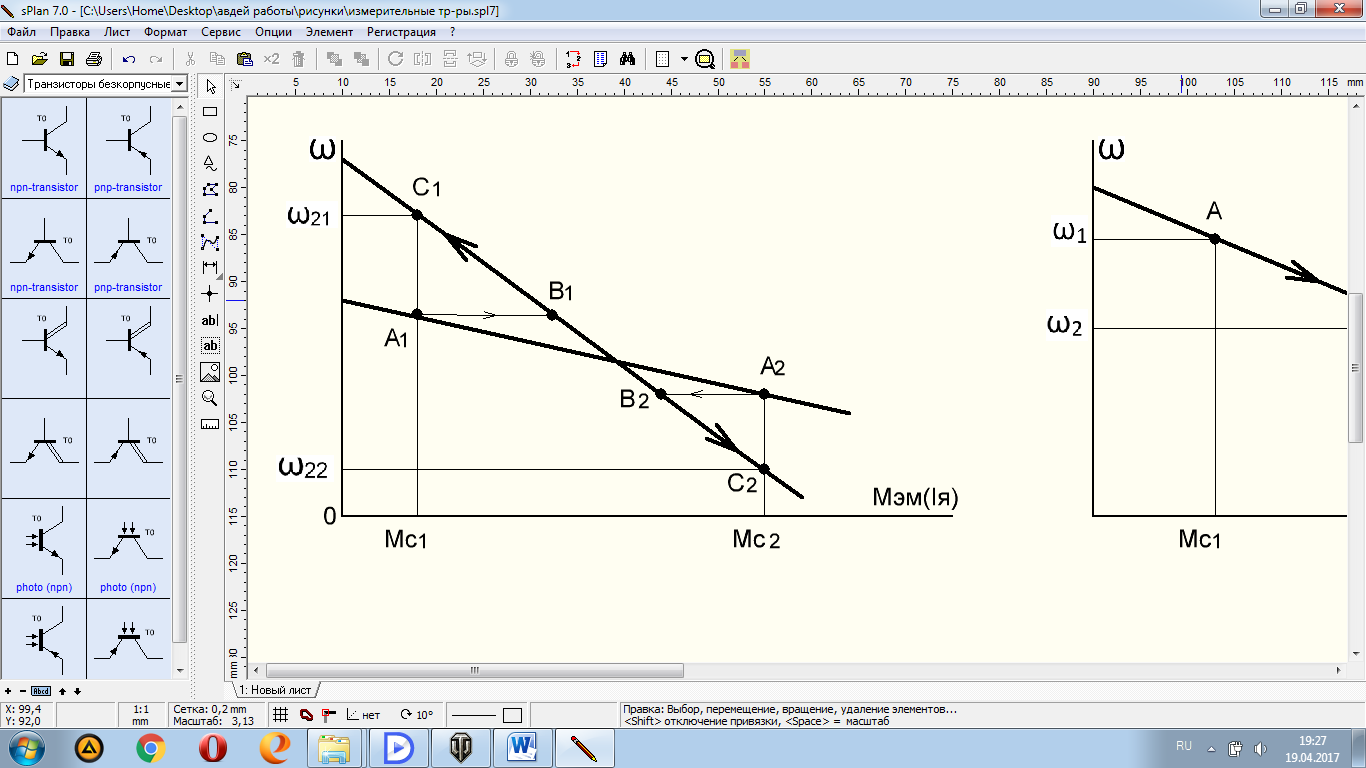
Рис. 4.22. Переходные процессы при включении добавочного сопротивления в цепь якоря: а) – на механических характеристиках; б) – на временных диаграммах
На рис. 4.22 показаны графики изменения тока якоря и скорости вращения двигателя на электрических (механических) характеристиках и временные диаграммы переходного процесса. Если режим двигателя соответствует точке А на естественной механической характеристике (рис. 4.22а), то при включении добавочного сопротивления мгновенно двигатель переходит в режим, соответствующий точки B при прежней скорости, но при меньших значениях тока якоря и вращающего момента . После чего скорость вращения двигателя будет плавно уменьшаться по экспоненциальному закону от режима В до режима С по искусственной механической характеристике. Если уменьшить ток возбуждения (магнитный поток), то следует рассмотреть два случая: при незначительной нагрузке на валу (Mс1, Iя1), и при сравнительно большой нагрузке (Mс2, Iя2) (см. рис 4.23).
Рис. 4.23. Траектория изменения режима работы при уменьшении магнитного потока
Переходной процесс в обоих последних случаях показан на механических характеристиках. В первом случае переходной процесс будет изменяться по траектории А1 – В1 – С1, во втором - А2 – В2 – С2. В обоих последних случаях новый установившейся режим будет соответствовать первоначальным моментам сопротивления, но при небольшом моменте сопротивления скорость Если внезапно изменить механическую нагрузку на валу двигателя, Мс1 (режима А) до величины Мс2 (режим В, рисунок 8), то переходной процесс будет плавно развиваться в соответствии с механической характеристикой двигателя и основным уравнением электропривода
Рис. 4.24. Траектория изменения режима работы двигателя при увеличении нагрузки на его валу
При этом скорость вращения двигателя будет уменьшаться по экспоненциальному закону от |
||
|
|
Последнее изменение этой страницы: 2018-04-11; просмотров: 627. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 , (4.8)
, (4.8) – угловое ускорение.
– угловое ускорение. положительное и система «двигатель – нагрузка», называемая электроприводом, увеличивает скорость вращения.
положительное и система «двигатель – нагрузка», называемая электроприводом, увеличивает скорость вращения. и скорость вращения привода падает.
и скорость вращения привода падает. и
и  .
. , где
, где  .
. ,
, , а сопротивление цепи якоря
, а сопротивление цепи якоря  складывается из сопротивлений обмотки якоря и регулировочного сопротивления, вводимого в цепь якоря для изменения скорости вращения.
складывается из сопротивлений обмотки якоря и регулировочного сопротивления, вводимого в цепь якоря для изменения скорости вращения. , то возрастает
, то возрастает  , а так как
, а так как  , то ЭДС якоря должна уменьшиться настолько, насколько увеличилось
, то ЭДС якоря должна уменьшиться настолько, насколько увеличилось  .
.  , то
, то  в установившемся режиме не должен измениться. Но с уменьшением потока должен возрасти ток якоря. В соответствии с электрическим равновесием увеличение тока якоря вызовет уменьшение ЭДС якоря
в установившемся режиме не должен измениться. Но с уменьшением потока должен возрасти ток якоря. В соответствии с электрическим равновесием увеличение тока якоря вызовет уменьшение ЭДС якоря  , а скорость вращения может остаться неизменной, но может и измениться как в сторону увеличения, так и уменьшения. Действительно, в соответствии с механической характеристикой при уменьшении потока, если нагрузка двигателя небольшая, скорость возрастает, если большая, то она падает.
, а скорость вращения может остаться неизменной, но может и измениться как в сторону увеличения, так и уменьшения. Действительно, в соответствии с механической характеристикой при уменьшении потока, если нагрузка двигателя небольшая, скорость возрастает, если большая, то она падает. остается прежней, то скачкообразно увеличивается ток в обмотке якоря:
остается прежней, то скачкообразно увеличивается ток в обмотке якоря: ,
,
 ). Но ток якоря уменьшится практически мгновенно (
). Но ток якоря уменьшится практически мгновенно (  ). Следовательно вращающий момент также уменьшится мгновенно (
). Следовательно вращающий момент также уменьшится мгновенно (  ). Это приведет к нарушению механического равновесия (
). Это приведет к нарушению механического равновесия (  ), ускорение становится отрицательным, и скорость начнет уменьшаться
), ускорение становится отрицательным, и скорость начнет уменьшаться  . С уменьшением скорости начнет уменьшаться ЭДС якоря и возрастать ток якоря и увеличиваться вращающий момент. Уменьшение скорости вращения и возрастание тока якоря будет продолжаться до тех пор, пока электромагнитный вращающий момент не сравняется с тормозным моментом сопротивления. В новом установившемся режиме ток якоря примет прежнее значение, а частота вращения уменьшится.
. С уменьшением скорости начнет уменьшаться ЭДС якоря и возрастать ток якоря и увеличиваться вращающий момент. Уменьшение скорости вращения и возрастание тока якоря будет продолжаться до тех пор, пока электромагнитный вращающий момент не сравняется с тормозным моментом сопротивления. В новом установившемся режиме ток якоря примет прежнее значение, а частота вращения уменьшится.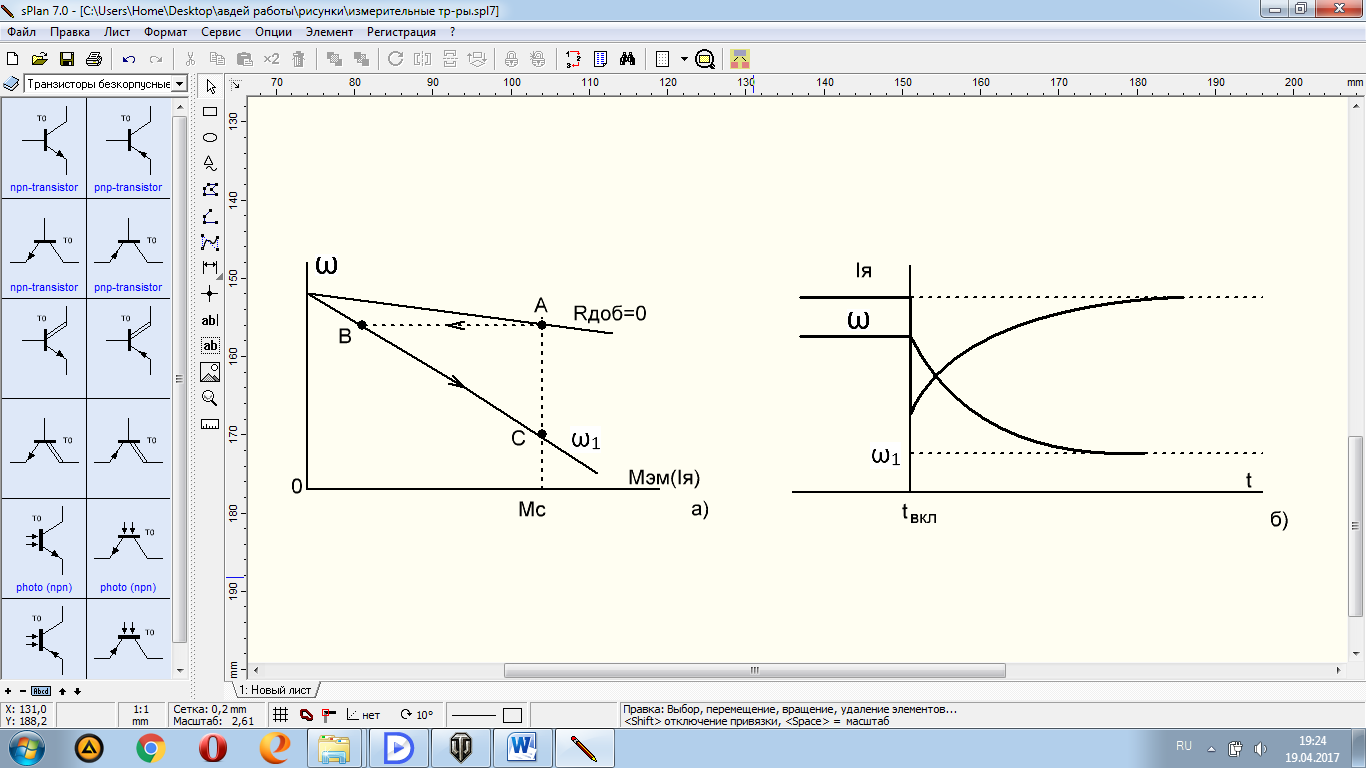
 возрастает, а при значительных нагрузках скорость
возрастает, а при значительных нагрузках скорость  уменьшается.
уменьшается. .
.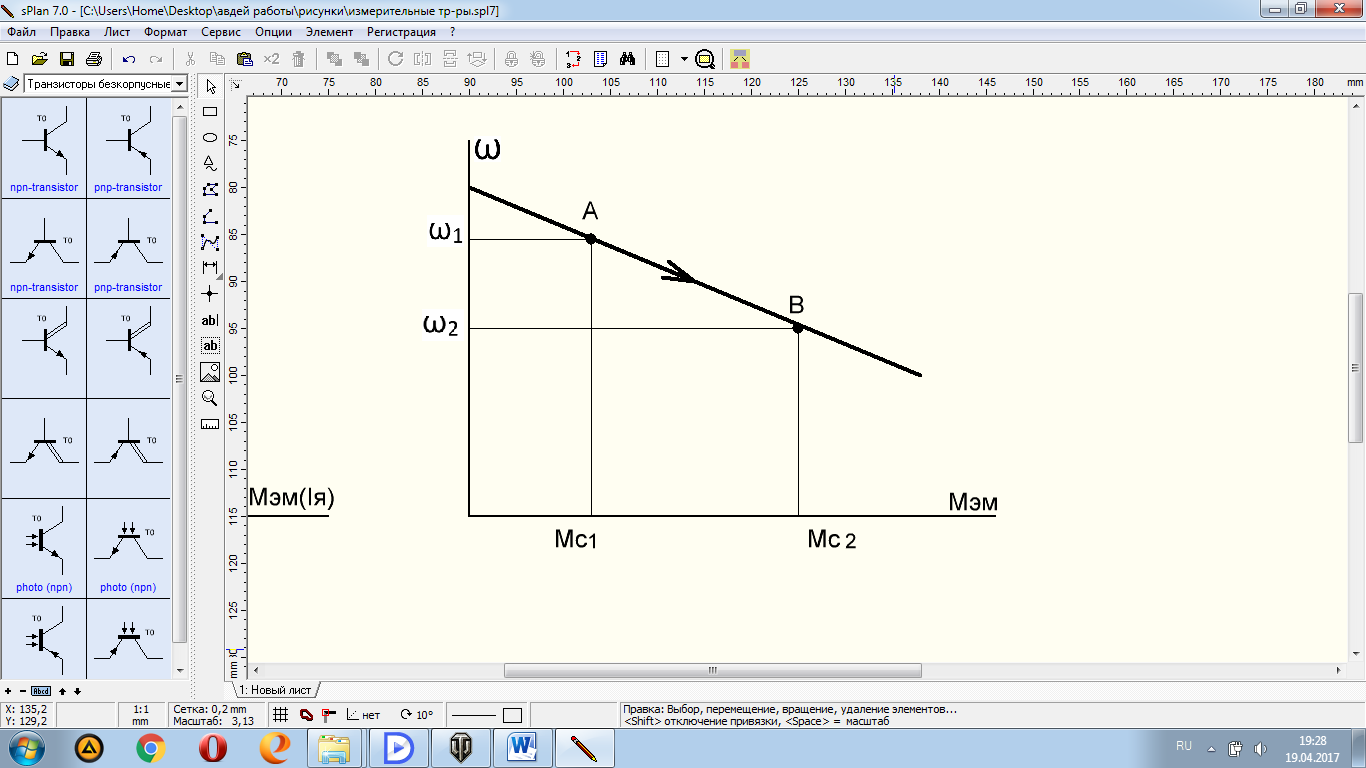
 до
до  , вращающий момент и ток якоря будут увеличиваться от Мс1 до Мс2 также по экспоненте.
, вращающий момент и ток якоря будут увеличиваться от Мс1 до Мс2 также по экспоненте.