|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
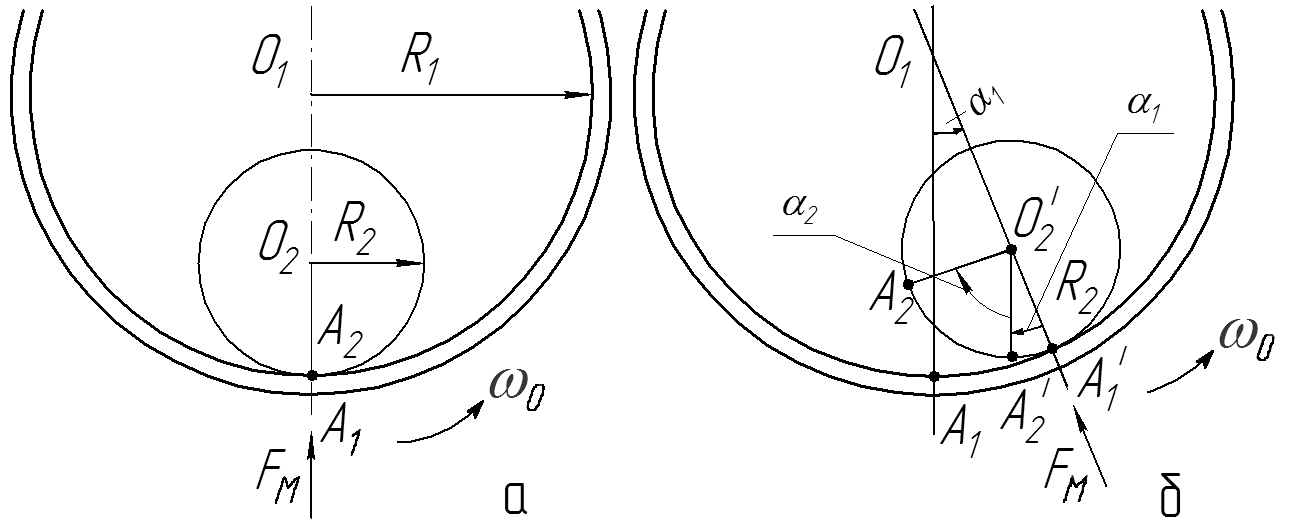
Двигатель с катящимся роторомОсобенностью двигателя с катящимся ротором (ДКР) является эксцентричное расположение ротора и статора. По принципу действия ДКР является синхронным реактивным двигателем с электромагнитной редукцией скорости. На рис. 3.31а показано расположение ротора и статора в момент времени t = 0, когда магнитное поле статора направлено вертикально вверх и радиус ротора А2О2 занимает вертикальное положение, а на рис. 3.31, б – в момент времени t, когда вращающееся поле статора повернулось против часовой стрелки на угол α1 и радиус ротора О′2А2 повернулся на угол α2.
Рис. 3.31. Расположение ротора и статора ДКР: а – в момент времени t = 0; б – в момент времени t Очевидно, отношение скоростей ротора и поля статора пропорционально отношению углов α1 и α2, на которые они повернулись за одно и то же время t:
Заменим в числителе Таким образом, Если Так как ротор ДКР расположен эксцентрично относительно статора, то для передачи вращающего момента к рабочему механизму применяют карданную передачу. Преимуществами ДКР являются отсутствие механического редуктора, большой пусковой момент при малом пусковом токе, а также небольшое время разгона. К недостаткам ДКР следует отнести значительные вибрации, шумы и низкий кпд. Волновые двигатели
 Отличительной особенностью волнового двигателя (ВД) является наличие гибкого эластичного ротора, который способен деформироваться (растягиваться) под действием электромагнитных сил. На внутренней поверхности статора и внешней поверхности ротора имеются зубцы с одинаковым шагом, но число зубцов статора z1 больше числа зубцов ротора z2. Отличительной особенностью волнового двигателя (ВД) является наличие гибкого эластичного ротора, который способен деформироваться (растягиваться) под действием электромагнитных сил. На внутренней поверхности статора и внешней поверхности ротора имеются зубцы с одинаковым шагом, но число зубцов статора z1 больше числа зубцов ротора z2. По принципу действия ВД являются синхронными реактивными двигателями с катящимся ротором, но оси ротора и статора в них совпадают (рис. 3.31). При вращении поля статора со скоростью ω0 ротор растягивается в эллипс таким образом, что его большая ось совпадает с направлением магнитного потока в данный момент времени. При этом магнитное сопротивление будет минимальным, а магнитный поток – максимальным. Как и в двигателе с катящимся ротором, коэффициент редукции
Так как число зубьев ротора меньше числа зубьев статора, то при вращении поля статора ротор будет вращаться в противоположном направлении. Волновой двигатель работает бесшумно, т.к. в нем нет вибраций, характерных для ДКР, он обладает небольшой инерцией и обеспечивает высокую точность перемещений. Шаговые двигатели Шаговые двигатели (ШД) служат для преобразования электрических сигналов в угловое (скачкообразное) перемещение вала. По назначению ШД являются исполнительными двигателями, а по принципу действия – синхронными реактивными или активными двигателями. Реактивный ротор выполняют явнополюсным без обмотки возбуждения, а активный ротор представляет собой постоянный магнит. На статоре располагается многофазная обмотка управления.
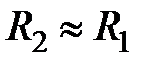
 Принцип работы ШД рассмотрим на примере реактивного двигателя с явно выраженными полюсами, на статоре которого располагается трехфазная обмотка управления ОУ. Принцип работы ШД рассмотрим на примере реактивного двигателя с явно выраженными полюсами, на статоре которого располагается трехфазная обмотка управления ОУ.
Если подать управляющий импульс тока на первую фазу, то явнополюсный ротор установится соосно с магнитным полем статора, образованным током этой фазы (рис. 3.33). Если перенести управляющий импульс на вторую фазу, то ротор по кратчайшему пути установится соосно с магнитным полем второй фазы, т.е. повернется по часовой стрелке на угол 60º. Таким образом, если подавать поочередно импульсы тока на фазные обмотки статора по схеме Для уменьшения шага увеличивают число пар полюсных выступов. Но возможно и другое техническое решение, позволяющее значительно уменьшить угловой шаг. Полюсные выступы статора такого ШД имеют гребенчатую зубцовую конструкцию. Цилиндрический ротор также выполняют зубчатым (рис. 3.34). Зубцы статора и ротора нарезаны с одинаковым шагом, но смежные полюсные выступы статора смещены относительно зубцов ротора на 1/3 зубцового деления.
Суммарный угол поворота ротора ШД пропорционален числу подаваемых импульсов, а скорость вращения – частоте следования импульсов. Наибольшая частота следования импульсов, при которой ШД работает без сбоев (т.е. без пропуска импульсов даже при пуске или остановке), называется приемистостью двигателя. Современные ШД имеют приемистость до 10 кГц. Наибольшее применение получили ШД в электроприводе с программным управлением.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАЧИ 3.1.Почему сердечник статора синхронной машины обязательно собирают из листов электротехнической стали, а ротор может быть изготовлен из куска стали? 3.2.Как изменится ток статора, угол рассогласования и коэффициент мощности при неизменном токе возбуждения синхронного генератора, если увеличить вращающий момент приводного двигателя? 3.3.Как следует изменить ток возбуждения и как изменится ток статора синхронного генератора, чтобы при уменьшении вращающего момента приводного двигателя сохранить прежний коэффициент мощности? 3.4.Как будет изменяться ток в обмотке статора, коэффициент мощности и угол рассогласования синхронного двигателя при увеличении тока возбуждения, если двигатель работает: а) с недовозбуждением; б) с перевозбуждением? При этом нагрузка на валу двигателя остаётся постоянной. 3.5.Будет ли изменяться угол рассогласования 3.6.Известны фазное напряжение синхронного генератора, cosj =1, q =30°. Во сколько раз необходимо увеличить ток возбуждения, чтобы при увеличении тока статора в 2 раза сохранить коэффициент мощности? Чему будет равен при этом угол рассогласования q? 3.7 Во сколько раз можно уменьшить ток возбуждения синхронного генератора, работающего на общую сеть при
3.8. Во сколько раз увеличится токовая нагрузка турбогенератора, работающего на общую сеть при 3.9. Как можно увеличить мощность синхронного генератора? 3.10. Как нужно изменить вращающий момент и ток возбуждения генератора, чтобы при увеличении активной мощности генератора его коэффициент мощности был неизменный? 3.11. Как изменится режим работы синхронного генератора, если уменьшится вращающий момент турбины? 3.12. По каким причинам синхронный двигатель может выйти из синхронизма? . Пояснить с помощью векторный диаграммы. 3.13. Как изменится коэффициент мощности перевозбужденного синхронного двигателя , если увеличить механическую нагрузку? 3.14.В чем сходство принципа действия волнового двигателя и двигателя с катящимся ротором. Их конструктивные особенности. 3.15.В чем сходство и различие синхронного тахогенератора и тахогенератора постоянного тока? Ответ пояснить рисунком. 3.16. Синхронный реактивный двигатель с одной парой явновыраженных полюсов ротора имеет 4 пары полюсов на статоре, на обмотки которых поочередно подаются импульсы тока. Сколько импульсов необходимо подать, чтобы ротор повернулся на 2 оборота ?
.
Рис.3.16. Синхронный реактивный двигатель
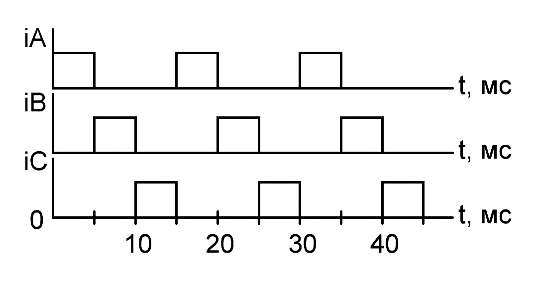
3.17. Какое положение займет ротор синхронного реактивного двигателя (рис.3.16.),если на статор поочередно в последовательности 2-3-4-1-2-3- и т.д. подать 82 импульса ? 3.18. Синхронный реактивный двигатель с электромагнитной редукцией скорости имеет 15 пар явновыраженных полюсов на роторе и 36 зубцов на внутренней поверхности статора. На какой угол, и в каком направлении и повернется ротор, если магнитное поле статора повернется по часовой стрелке на угол 10°? Ответ пояснить рисунком. 3.19. Синхронный реактивный шаговый двигатель с явнополюсным ротором имеет 3 пары полюсов на статоре и 2 пары полюсов на роторе (рис.3.20). На соседние обмотки статора поочередно подаются импульсы тока. В последовательности: В-С-А-В-С… На какой угол и в каком направлении повернется ротор, если подать 20 импульсов? Сделать рисунок. 3.20. Синхронный шаговый двигатель имеет 3 пары полюсов на статоре и 2 пары полюсов на роторе (рис.3.20). С какой частотой (об/мин) и в каком направлении будет вращаться шаговый двигатель, если на его обмотки подавать импульсы тока в соответствии с временной диаграммой? Рис. 3.20. Синхронный шаговый двигатель
3.21. Турбогенератор Т2-100-2 с паспортными данными: Pн =100 МВт, Uн=15,75 кВ, Xc =3,1 Ом, cosjн =0,9, нормальный ток возбуждения Iвн =294 А (ток возбуждения, при котором Eo =Uфн ) при токе возбуждения Iв =500 А приводится во вращение турбиной, развиваемой момент М=150кНм. Определить ток, коэффициент мощности, активную и реактивную мощности турбогенератора в заданном режиме. 3.22. Трехфазный синхронный генератор номинальной мощностью Sн = 50 МВ·А имеет следующие паспортные данные: Uн = 11,4 кВ, cos φн = 0,8 , xc = 3 Ом , nн = 3000 об/мин включен звездой и работает с сетью бесконечной мощностью напряжением Uc = 11,4 кВ. Определить: 1) угол рассогласования θн , соответствующий Pн , максимальный и номинальные моменты, номинальную ЭДС E0н ; 2) угол рассогласования θ2 и ЭДС E02 , если φ = - φн ; 3) угол рассогласования θ3 и ЭДС E03 , если cos φ3 = 1 ; 4) E04 и ток статора, при которых синхронный генератор выходит из синхронизма.
3.23. Как изменится угол рассогласования ϴ и ток статора I синхронного двигателя, если напряжение питающей сети снизится на 25% по отношению к номинальному, а нагрузка на валу двигателя остаётся номинальной. Номинальные данные двигателя: Pн = 2,7 МВт, Uн = 6 кВ, cosφн = 0,8, ηн = 0,96, число пар полюсов p=3, синхронное сопротивление xc=16 Ом.
3.24. Цех завода потребляет активную и реактивную мощность соответственно P1=300 кВт и Q1=200 квар при напряжении сети 380 В. Но в цехе потребовалась дополнительная установка мощностью 160 кВт. Сеть была рассчитана на ток 720 А. Если для новой установки использовать асинхронный двигатель мощностью 160 кВт, который не будет загружать линию реактивной мощностью, то даже этот идеальный двигатель совместно с ранее установленной мощностью будет потреблять ток, больший допустимого значения. Подобрать синхронный двигатель для решения этой проблемы. 3.25. Определить номинальные параметры синхронного генератора, значения которых не указаны в таблице вариантов. Здесь
Таблица вариантов
3.26. Синхронный двигатель с известным синхронным реактивным сопротивлением xc включен звездой на номинальное напряжение сети Uc , потребляет ток I и развивает мощность P при фазном сдвиге φ между током I и напряжением сети Uc . ЭДС E0 обмотки статора отстает от напряжения на обмотке U на угол
3.27. Определить ток, коэффициент мощности, активную и реактивную мощности турбогенератора типа Т2-100-2 при заданными токе возбуждения Iв и моменту на валу (см. таблицу вариантов). Паспортные данные турбогенератора: Pн = 100 МВт, Uн = 15 кВ, xc = 3 Ом, cosφн = 0,9, ток возбуждения Iвн = 300 А, при котором Eoн = 8,66 кВ. Таблица данных по вариантам
3.28. По заданной нагрузке P для трёх значений фазных сдвигов между током и напряжением φ1 = 0, φ2 и φ3 (см. таблицу данных по вариантам) определить требуемый ток возбуждения Iв, ток статора I, угол рассогласования ϴ и момент, развиваемый первичным двигателем (турбиной) турбогенератора Т2-30-2 с паспортными данными: Pн = 30 МВт, Uн = 10,5 кВ, xc = 9,35 Ом, n = 3000 об/мин, ток возбуждения Iвн = 150 А, соответствующий E0=Uфн. Векторные диаграммы построить в масштабе 100 В/мм. Таблица данных по вариантам
3.29. Синхронный двигатель с известным синхронным сопротивлением Кроме Таблица данных по вариантам
Например, в варианте 6 известны 3.30. Для синхронного двигателя СДН-16-38-8 с номинальными данными: PН = 0,8 МВт, UН = 6кВ, f = 50Гц, ηН = 94,9%, cos φН = 0,8 (опережающий), xС = 40 Ом, Mmax /MН = 1,9 1. Построить векторную диаграмму тока, напряжений , ЭДС, и угловую характеристику при номинальной нагрузке и номинальном токе возбуждения. 2. Определить коэффициент мощности при номинальном токе возбуждения ить векторную диаграмму в масштабе mU = 0,1 кВ/мм. 3. Определить при каком относительном значении тока возбуждения iВ2/iВН коэффициент мощности cos φ2 = 1. Определить все параметры для построения ВД и U – образной характеристики (θ2 ,ΔU2 , E02 , cos φ2 , φ2 и ток I2 в этом режиме). 4. Определить вышеуказанные параметры п.3 при iВ3 = 0,65∙ iВН. 5. Определить эти параметры при токе возбуждения iВН, при котором СД выходит из синхронизма. 6. Определить эти параметры при iВ5 = 1,25∙ iВН. 7. При номинальном токе возбуждения определить при какой токовой нагрузке СД выходит из синхронизма. Определить при этом электромагнитную мощность, развиваемую синхронным двигателем. Для всех шести режимов построить ВД в масштабе 0,1 кВ/мм. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-04-11; просмотров: 806. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 .
. на отношение дуги к радиусу
на отношение дуги к радиусу  . Если ротор перекатывается без скольжения, то
. Если ротор перекатывается без скольжения, то  и отношение
и отношение  (коэффициент редукции).
(коэффициент редукции). .
. , то коэффициент редукции может достигать значения Kp = 10–4. Например, при скорости вращения поля n0 = 3000
, то коэффициент редукции может достигать значения Kp = 10–4. Например, при скорости вращения поля n0 = 3000  ротор будет вращаться очень медленно со скоростью n = 0,3
ротор будет вращаться очень медленно со скоростью n = 0,3  .
. и
и  .
. и т.д. с частотой
и т.д. с частотой  , ШД будет вращаться с частотой
, ШД будет вращаться с частотой  , совершая один оборот после подачи шести импульсов. Чтобы поменять направление вращения ротора, необходимо изменить порядок следования импульсов тока по фазам:
, совершая один оборот после подачи шести импульсов. Чтобы поменять направление вращения ротора, необходимо изменить порядок следования импульсов тока по фазам:  и т.д.
и т.д.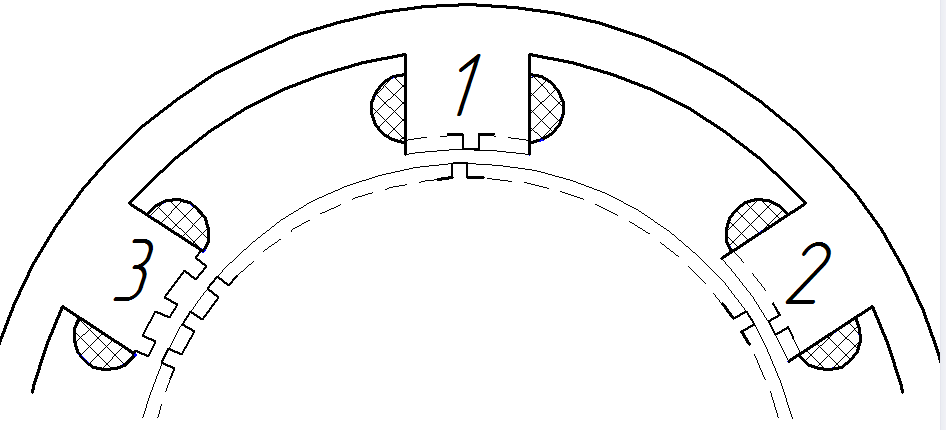

 при увеличении тока возбуждения, если мощность на валу синхронного двигателя остаётся неизменной?
при увеличении тока возбуждения, если мощность на валу синхронного двигателя остаётся неизменной? ,чтобы он не вышел из синхронизма, если мощность генератора поддерживать постоянной?
,чтобы он не вышел из синхронизма, если мощность генератора поддерживать постоянной? и cos
и cos  , чтобы при увеличении вращающего момента турбины генератор не вышел из синхронизма, если ток возбуждения остается неизменным? Чему будет равен коэффициент мощности в этом критическом режиме?
, чтобы при увеличении вращающего момента турбины генератор не вышел из синхронизма, если ток возбуждения остается неизменным? Чему будет равен коэффициент мощности в этом критическом режиме?

 ссс
ссс и
и  – номинальная мощность и момент приводного двигателя;
– номинальная мощность и момент приводного двигателя;  – потери мощности генератора;
– потери мощности генератора;  – номинальное линейное напряжение.
– номинальное линейное напряжение. %
%
 P,
кВт
P,
кВт

 . Как определить требуемую величину по двум заданным в таблице вариантов. Кроме того, известны Uc , xc , p – число пар полюсов. Пояснить порядок построения векторной диаграммы фазного тока, напряжения , ЭДС и
. Как определить требуемую величину по двум заданным в таблице вариантов. Кроме того, известны Uc , xc , p – число пар полюсов. Пояснить порядок построения векторной диаграммы фазного тока, напряжения , ЭДС и  - падения напряжения на синхронном реактивном сопротивлении. Принять заданный угол φ для нечетных вариантов положительным, а для четных – отрицательным.
- падения напряжения на синхронном реактивном сопротивлении. Принять заданный угол φ для нечетных вариантов положительным, а для четных – отрицательным. включен звездой на номинальное напряжение сети
включен звездой на номинальное напряжение сети  . Двигатель потребляет мощность P, ток I при фазном сдвиге φ. Угол рассогласования между фазным значением напряжения сети и ЭДС обмотки статора
. Двигатель потребляет мощность P, ток I при фазном сдвиге φ. Угол рассогласования между фазным значением напряжения сети и ЭДС обмотки статора  равен
равен  . Как по известным параметрам определить неизвестные?
. Как по известным параметрам определить неизвестные?