|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Синхронные реактивно-гистерезисные двигателиСтатор реактивно-гистерезисного двигателя (РГД) представляет собой П-образный сердечник 1 с явно выраженными полюсами 2 (рис. 3.29). Каждый полюс разделен продольным пазом на две части, одна из которых охватывается короткозамкнутым витком 3. Обмотка статора 4 наматывается на каркас подобно обмотке трансформатора. Ротор 5 собирается из Если включить обмотку статора в сеть переменного тока, то благодаря расщепленным экранированным полюсам образуется вращающееся магнитное поле. При пуске РГД на ротор действует асинхронный и гистерезисный моменты. После пуска ротор втягивается в синхронизм и асинхронный момент становится равным нулю, но благодаря явнополюсному ротору появляется синхронный реактивный момент.

Известны однофазные синхронные реактивно-гистерезисные двигатели серии ДСД и ДСДР. Эти двигатели имеют большие габариты и низкие энергетические показатели (кпд и cosφ). Но достоинством РГД является простота конструкции и технологичность при изготовлении. Применяются РГД в приборной технике и автоматических устройствах для привода программных и временных механизмов (лентопротяжные механизмы, реле времени, электрические часы). 3.7.5. Двигатели электромагнитной редукцией скорости Статор двигателя похож на статор обычного традиционного двигателя, но на внутренней поверхности имеет z1 зубцов. Угловой шаг зубцов статора α1 = 360/z1. По внешней поверхности ротора также вырезаны зубцы. Число зубцов ротора z2 > z1, так что угловой шаг зубцов ротора α2 = 360/z2 (рис. 3.30). 
 При включении обмотки статора (на рисунке не показан) в трехфазную или однофазную сеть образуется вращающееся магнитное поле. По принципу действия двигатель является синхронным реактивным. При включении обмотки статора (на рисунке не показан) в трехфазную или однофазную сеть образуется вращающееся магнитное поле. По принципу действия двигатель является синхронным реактивным.
Пусть в начальный момент времени ось магнитного потока совпадает с осью первого зубца статора. Тогда ближайший к нему зубец ротора установится соосно с зубцом статора, т.к. в этом положении магнитное сопротивление минимально, а магнитный поток наибольший (принцип работы электромагнитных устройств). Когда ось магнитного поля повернется на угол α1 и будет проходить через второй выступ, ближайший к нему зубец 2 ротора установится соосно со вторым зубцом статора, т.е. повернется по часовой стрелке на угол α1 – α2. Скорость вращения поля ω0 и скорость вращения ротора ω будут пропорциональны их угловому перемещению, соответственно α1 и α1 – α2.
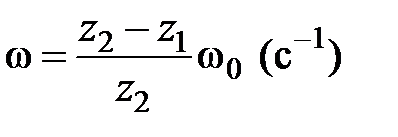
Отсюда скорость вращения ротора двигателя
Например, при n0 = 3000 при n0 = 3000 |
||||
|
|
Последнее изменение этой страницы: 2018-04-11; просмотров: 1122. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 .
. или
или  .
. , z1 = 16, z2 = 18 n = 333
, z1 = 16, z2 = 18 n = 333  ;
; , z1 = 398, z2 = 400 n = 15
, z1 = 398, z2 = 400 n = 15  .
.