|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
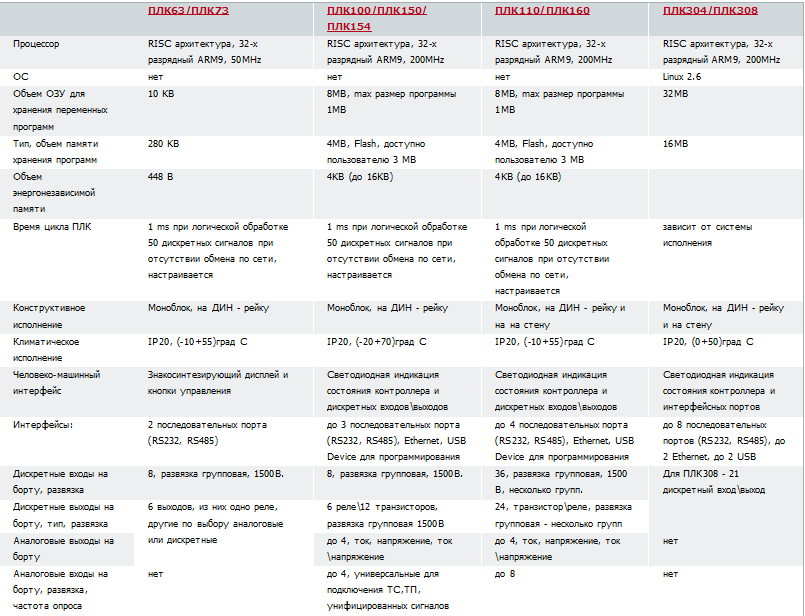
Обзор автоматизированных систем, необходимых для реализации выбранного способа управленияДля объединения всех электромеханических компонентов системы управления в один логический блок необходим контроллер с несколькими модулями расширения, а именно: 1) Драйвер шагового двигателя 2) Драйвер соленоида 3) Аналого-цифровой преобразователь На сегодняшний день на рынке существует масса программных и аппаратных средств автоматизации технологических процессов. Все они представляют собой связку «программируемый логический контроллер (ПЛК) + SCADA». Примером подобных устройств может служить линейка ПЛК отечественной компании ОВЕН. С 2007 года компания ОВЕН начала продажи программируемых контроллеров ОВЕН ПЛК. Выпускаемые контроллеры представляют собой не логическими реле, а полноценные контроллеры, с мощными аппаратными ресурсами, и широкими возможностями программирования. Контроллеры ОВЕН ПЛК построены на современной цифровой элементной базе. Изначально заложены достаточно мощные аппаратные ресурсы (рисунок 5.1): процессор, с широкими вычислительными возможностями, большое количество памяти. Программируются контроллеры ОВЕН ПЛК с помощью профессиональной среды CoDeSys, разработанной немецкой компанией 3S-Software. Спектр применений ОВЕН ПЛК достаточно широк, это как построение распределенных систем управления и диспетчеризации, так и автоматизация небольших задач. Основные отрасли применения: ЖКХ, котельные, энергетика, автоматизация станков и автоматов, пищевая и упаковочная промышленность.
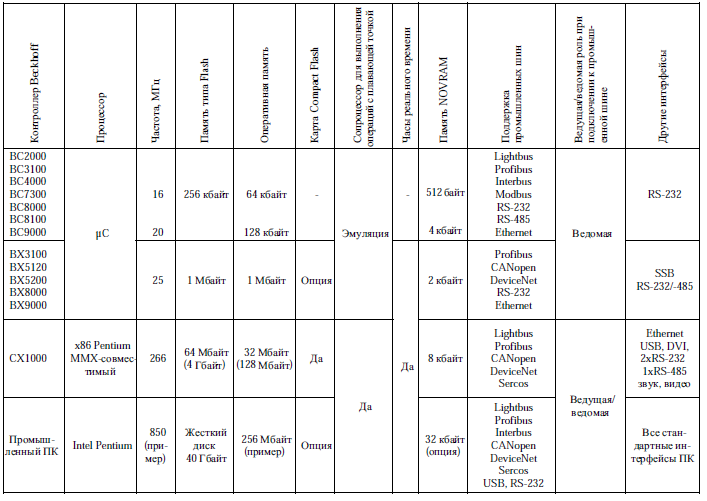
Рисунок 5.1 – Сводная таблица характеристик ОВЕН ПЛК Из зарубежных компаний стоит обратить внимание на продукцию фирмы Beckhoff. Beckhoff заработала репутацию одного из лидеров в производстве систем промышленной автоматизации на базе ПК-совместимых элементов управления. Кроме того, компания предлагает масштабируемые системы на базе ПЛК, обладающие широкими возможностями и отличающиеся приемлемой ценой (рисунок 5.2). Решения от Beckhoff нашли применение практически во всех областях автоматизации: автомобильной промышленность, пищевая промышленность, автоматизация зданий, системы управления различными видами станков, роботов. 
Рисунок 5.2 – Характеристики аппаратных средств ПЛК компании Beckhoff Также лидерами по производству ПЛК являются компании: Siemens, Segnetics, Schneider Electric. При широких возможностях ПЛК различных производителей все они, как уже отмечалось, имеют один существенный недостаток – стоимость устройства вместе с модулями расширения – от 6 тысяч рублей и выше. Немногим выгоднее в этом отношении представляется продукция компании ОВЕН.
Заключение Анализ литературного обзора позволяет сделать следующие выводы: - маятниковый деформатор разрушает зерна по бороздке, что позволяет увеличить выход муки, относительно обработки зерна на вальцовых станках и уменьшает энергозатраты на измельчение; - существующий способ управления процессом подъема колеблющейся поверхности маятникового деформатора имеет ряд недостатков (высокая цена, сложность системы); - существующие программно-аппаратные средства для автоматизации технологических процессов имеют высокую стоимость. Исходя из вышесказанного, целью данной работы является разработка автоматизированной системы управления процессом подъема колеблющейся поверхности маятникового деформатора. Для достижения поставленной цели определены следующие задачи: а) анализ автоматизированных систем в области зернопереработки; б) подбор привода подвижных частей установки, разработка автоматизированной системы управления шаговым двигателем; в) расчет материальных затрат по проектированию автоматизированной системы управления и мониторинга; г) анализ работ по проектированию системы по опасным и вредным факторам. Выполнение необходимых расчетов.
Список использованной литературы 1) Адреас, Т. Категории контроллеров Beckhoff. Гибкие возможности автоматизации / Т. Адреас // Промышленные АСУ и контроллеры. – 2004. – №11. – С. 48-52. 2) Выбор шагового двигателя - крутящий момент двигателя в грузоподъемной установке [Электронный ресурс]: «НТФ Электропривод». – Электрон. текст. дан. – 2012. – Режим доступа: http://electroprivod.ru/lifter.htm 3) Злочевский В. Л. Способ размола зерновых и зернистых материалов: пат. 2407590. – Российская Федерация. – 2009. – 7 с. 4) Кенио Т. Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ. – М.: Энергоатомиздат, 1987. – 200 с.: ил. 5) Лабораторный маятниковый измельчитель [Электронный ресурс]: Центр Научно-Технического Развития Зерноперерабатывающей Промышленности. – Электрон. текст. дан. – Барнаул, 2013. – Режим доступа: http://intensifikachia.ucoz.com/index/majatnikovyj_izmelchitel/0-5 6) Мельница[Электронный ресурс]: Википедия. – Электрон. текст. дан. – 2013. – Режим доступа: http://ru.wikipedia.org/wiki/Мельница 7) Программируемые логические контроллеры ОВЕН [Электронный ресурс]: Оборудование для автоматизации ОВЕН. – Электрон. текст дан. – Москва, 2009. – Режим доступа: http://www.owen.ru/catalog/13568456 8) Тарасов, В. П. Технологическое оборудование зерноперерабатывающих предприятий. Учебное пособие / В. П. Тарасов; Алт. гос. техн. ун-т им. И. И. Ползунова. – Барнаул : Изд-во АлтГТУ, 2002. – 232 с. 9) Чекмарев А. А. Начертательная геометрия и черчение: Учеб. для студ. высш. учеб. заведений. – 2-е изд., перераб. и доп. – М.: Гуманит. изд. центр ВЛАДОС, 2002. – 472 с.: ил. 10) Чигарев, А. В. Курс теоретической механики: учеб. пособие / А. В. Чигарев, Ю. В. Чигарев. – Минск: Новое знание, 2010. – 399 с.: ил. Приложение 1 |
||
|
|
Последнее изменение этой страницы: 2018-05-29; просмотров: 512. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |