|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Частотное регулирование эффективно применяется на предприятиях энергетики, промышленности и коммунального хозяйства.Состав элементов частотно-регулируемого электропривода, их работа и назначение показаны на схеме.
Из питающей сети (1) переменное напряжение промышленной частоты (~ U, = f) поступает на вход выпрямителя (2). Для сглаживания пульсаций выпрямленного напряжения на выходе выпрямителя устанавливается фильтр (3). И уже постоянное (= U) (сглаженное) напряжение подаётся на вход управляемого импульсного инвертора тока (4). Электронные ключи инвертора по сигналам системы управления (8) открываются и запираются таким образом, что формируемые при этом различные по длительности импульсы тока складываются в результирующую кривую синусоидальной формы с необходимой частотой. Для сглаживания пульсаций, на выходе инвертора может устанавливаться дополнительный высокочастотный фильтр (5). Затем напряжение подаётся на обмотки электродвигателя (М), который является приводом механизма технологической системы (6). Подлежащий регулированию параметр технологической системы измеряется датчиком (7), управляющий сигнал от которого подаётся в систему управления ЧРП (8). Либо внешняя система управления (9) собирает информацию о многих параметрах, характеризующих работу технологической системы, обрабатывает её и подаёт результирующий сигнал в систему управления приводом. В зависимости от величины, иногда скорости изменения этого сигнала, и программных установок, микропроцессорная система управления ЧРП формирует и подаёт управляющие импульсы на электронные ключи выпрямителя и инвертора. Для самоконтроля и защиты система управления собирает и обрабатывает сигналы о наличии или величине ряда параметров, характеризующих работу собственных подсистем. Контролируются токи и напряжения на входе, выходе из преобразователя и в магистрали постоянного тока. Измеряется температура элементов и регулируется производительность системы охлаждения преобразователя. Контролируется состояние отдельных элементов вплоть до отдельного ключа. При наличии специального датчика в корпусе электродвигателя измеряется, а при отсутствии датчика рассчитывается по электрическим характеристикам потребляемой двигателем энергии температура двигателя.  Таковы общие принципы частотного регулирования электроприводов. Конкретные схемные решения в зависимости от условий различны, различаются и принципы управления частотно-регулируемым электроприводом. Как и большинство технических решений такого рода, частотное регулирование электроприводов имеет свои недостатки и ограничения.
· Автоматическое управление двигателями переменного тока Асинхронные двигатели с короткозамкнутым ротором запускают прямым включением в сеть. Схемы управления двигателями переменного тока имеют коммутационную аппаратуру, устройства защиты и различные блокировки. Простейшей схемой управления асинхронным двигателем с короткозамкнутым ротором является схема с автоматом и контактором или с реверсивным магнитным пускателем. Схема пуска асинхронного двигателя с помощью контактора показана на рис.21
Рис.21
Защитные функции выполняет автомат QF, отключающий двигатель при коротких замыканиях и чрезмерных бросках тока. Контактор КМ обеспечивает дистанционное управление двигателем с помощью кнопок управления SB1, SB2. Схема управления асинхронного двигателя с помощью реверсивного магнитного пускателя показана на рис.22
Защита двигателя от коротких замыканий осуществляется плавкими вставками, а от перегрузок – встроенными в магнитный пускатель M тепловыми реле FP1 и FP2. Магнитный пускатель производит дистанционный пуск, реверс и остановку асинхронных двигателей мощностью до 75кВт, работающих в продолжительном режиме. Иногда его можно использовать при кратковременном или повторно-кратковременном режиме с небольшим количеством включений в час. Командным аппаратом является кнопочная станция с кнопками SB1 («Стоп»), SB2 («Назад») и SB3 («Вперед»). Торможение в рассмотренных схемах осуществляется за счет трения в подвижных частях механизма. Схема торможения асинхронного электродвигателя в функции времени (Рис.23, а). При вращении двигателя реле времени КТ включено и замыкающим контактом подготавливает цепь контактора торможения КМТ к работе. При нажатии кнопки SB1(«Стоп») контактор КМ теряет питание и своим размыкающим контактом подключает контактор КМТ к сети. Начинается процесс динамического торможения двигателя, длительность которого определяется установкой реле КТ.
Схема торможения АД в функции времени с прямым её контролем индукционным реле (Рис.23, б). При включенном двигателе контактор КМВ втянут, реле КС, замкнув свой контакт, подготовило к включению контактор КМТ. После нажатия кнопки SB1(«Стоп») контактор КМВ отключается и своим вспомогательным контактом включает контактор КМТ. Начинается процесс торможения в режиме противовключения. При угловой скорости двигателя, близкой к нулю, контакт реле К размыкается и отключает контактор КМТ, двигатель останавливается.
Рис.23, б
|
||||
|
|
Последнее изменение этой страницы: 2018-05-29; просмотров: 417. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

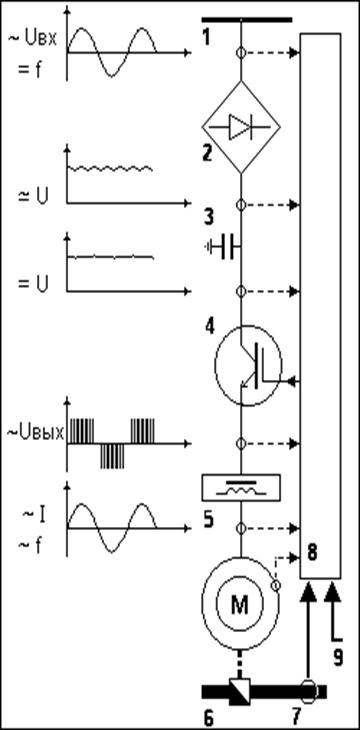

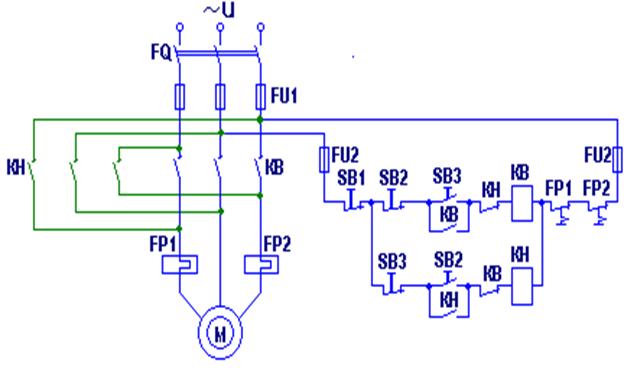
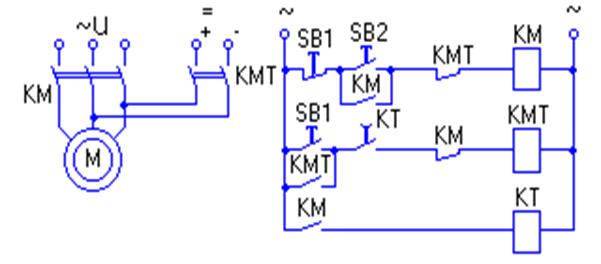 Рис.23, а. Схема динамического торможения асинхронного двигателя в функции времени
Рис.23, а. Схема динамического торможения асинхронного двигателя в функции времени