|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Типовые схемы управления электродвигателями переменного тока
· Пуск в ход асинхронных двигателей
При включении асинхронного двигателя в сеть переменного тока по обмоткам его статора и ротора будут проходить токи, в несколько раз больше номинальных. Это объясняется тем, что при неподвижном роторе вращающееся магнитное поле пересекает его обмотку с большой частотой, равной частоте вращения магнитного поля в пространстве, и индуцирует в этой обмотке большую ЭДС. Эта ЭДС создает большой ток в цепи ротора, что вызывает возникновение соответствующего тока и в обмотке статора. При увеличении частоты вращения ротора скольжение уменьшается, что приводит к уменьшению ЭДС и тока в обмотке статора. Большой пусковой ток нежелателен как для двигателя, так и для источника, от которого источник получает энергию. При частых пусках большой пусковой ток приводит к резкому повышению температуры обмоток двигателя, что может вызвать преждевременное старение его изоляции. В сети при больших токах понижается напряжение, что оказывает влияние на работу других приемников энергии, включенных в эту же сеть. Поэтому прямой пуск двигателя непосредственным включением его в сеть допускается только в том случае, когда мощность двигателя намного меньше мощности источника энергии, питающего сеть. Если мощность двигателя соизмерима с мощностью источника энергии, необходимо уменьшить ток, потребляемый этим двигателем при пуске в ход. Двигатели с фазным ротором обладают очень хорошими пусковыми свойствами. Для уменьшения пускового тока обмотку ротора замыкают на активное сопротивление, называемое пусковым реостатом (Рис.21). При включении такого сопротивления в цепь обмотки ротора ток в ней уменьшится, а, следовательно, уменьшаются токи как в обмотке статора, так и потребляемый двигателем из сети. При этом увеличится активная составляющая тока ротора и, следовательно, вращающий момент, развиваемый двигателем при пуске в ход. 
Рис.21 Пусковые реостаты имеют несколько контактов, поэтому можно постепенно уменьшать сопротивление, введенное в цепь обмотки ротора. После достижения ротором номинальной частоты вращения реостат полностью выводится, т.е. обмотку ротора замыкают накоротко. При номинальной частоте ротора скольжение мало и ЭДС, индуцируемая в его обмотке, также незначительна. Поэтому никакие добавочные сопротивления в цепь ротора не нужны. Пусковые реостаты работают непродолжительное время в процессе разгона двигателя и рассчитываются на кратковременное действие. Если оставить реостат включенным длительное время, то он выйдет из строя. Двигатель с короткозамкнутым ротором при малой мощности его по сравнению с мощностью источника энергии пускают в ход непосредственным включением в сеть. При большой же мощности двигателя пусковой ток уменьшают, понижая приложенное напряжение. Для понижения напряжения на время пуска двигатель включают в сеть через понижающий автотрансформатор или реакторы. При вращении ротора с нормальной частотой двигатель переключают на полное напряжение сети. Недостатком такого способа пуска двигателя в ход является резкое уменьшение пускового момента. Для уменьшения пускового тока в N раз, необходимо приложенное напряжение также уменьшить в N раз, при этом пусковой момент, пропорциональный квадрату напряжения, уменьшится в N2 раз. Таким образом, понижение напряжения допустимо при пуске двигателя без нагрузки или при малых нагрузках. Часто применяют пуск в ход двигателей посредством переключения обмотки статора со «звезды» на «треугольник» (Рис.22). В момент пуска обмотку статора соединяют «звездой», а после того как двигатель разовьет частоту, близкую к нормальной, ее переключают «треугольником». При таком способе пуска двигателя в ход, пусковой ток в сети уменьшается в три раза по сравнению с пусковым током, который потреблялся бы двигателем, если бы при пуске обмотка статора была соединена «треугольником». Этот способ пуска можно применять для двигателя, обмотка статора которого при питании от сети данного напряжения должна быть соединена «треугольником».
Рис.22
Для пуска асинхронных двигателей также применяют реакторы и автотрансформаторы. Схема пуска асинхронного двигателя при помощи реактора показана на рис.35 Для пуска двигателя включается рубильник Q1 при этом напряжение пуска будет составлять Uпуск=0,65Uном Т.е. пусковой ток незначителен и при достижении номинальной угловой скорости включается рубильник Q2 и двигатель получает номинальное напряжение. Схема пуска асинхронного двигателя при помощи автотрансформатора показана на рис.36
При пуске двигателя необходимо замкнуть рубильники Q1 и Q2 в этом случае на двигатель будет подаваться пониженное напряжение, за счет падения напряжения в обмотках автотрансформатора. По мере того как двигатель набирает скорость Q3 размыкают, а Q2 замыкают тогда трансформатор окажется закорочен и напряжение сети будет приложено к двигателю.
· Регулирование частоты вращения трехфазных асинхронных двигателей Частота вращения ротора определяется следующим выражением: n2=n1(1—S)=60f1*(1—S)/p Из этого выражения видно, что частоту вращения ротора можно регулировать изменением любого из трёх параметров, определяющих её, т.е. изменением частоты тока сети f1 , числа пар полюсов р, скольжения S. Регулирование частоты вращения асинхронного двигателя изменением числа пар полюсов возможно, если на статоре имеется несколько обмоток (обычно две) с различным числом полюсов. Одна обмотка, которую можно переключать на различное число полюсов, или две обмотки, каждая из которых может переключаться на различное число полюсов. Этот способ регулирования частоты вращения асинхронного двигателя экономичен, но недостатком его является ступенчатое изменение частоты. Кроме того, стоимость такого двигателя значительно возрастает вследствие усложнения обмотки статора и увеличения габаритов машины. Регулирование частоты вращения изменением числа полюсов применяется в двигателях с короткозамкнутым ротором, а в двигателях с фазным ротором этот способ не используется. Скольжение можно изменять регулировочным реостатом, введенным в цепь обмотки ротора, а также изменением напряжения сети. При регулировании напряжения питающей сети изменяется вращающий момент двигателя, пропорциональный квадрату напряжения. При уменьшении вращающего момента начнет уменьшаться частота вращения ротора, т.е. увеличится скольжение. Регулировочный реостат включается в цепь обмотки фазного ротора подобно пусковому реостату, но в отличие от пускового этот реостат рассчитывается на длительное прохождение тока. При включении регулировочного реостата ток в роторе уменьшится, что вызовет снижение вращающего момента двигателя, и, следовательно, уменьшение частоты вращения или увеличение скольжения. При увеличении скольжения возрастают ЭДС и ток в роторе. Этот способ регулирования частоты вращения может использоваться только в двигателях с фазным ротором. Недостатком этого метода является то, что он не экономичен, так как в регулировочном реостате происходят значительные потери энергии. Управление частотой Со сменой частоты питания изменяется и максимальный электромагнитный момент. Поэтому для сохранения неизменных способностей к перегрузкам и КПД асинхронного двигателя следует одновременно со сменой частоты f1 изменять и напряжение питания U1Ф. Соотношение между напряжением U1ф и моментом М на частоте f1 и напряжением U11ф c моментом М1 на частоте f11 выражается равенством:
Если частотой вращения асинхронного двигателя управлять с условием постоянной мощности двигателя (Рдв=const), то напряжение питания следует изменять соответственно закону:
· Частотное регулирование асинхронного электродвигателя
Около 70% вырабатываемой электроэнергии потребляют электродвигатели переменного тока. Большое распространение электродвигателей переменного тока для привода механизмов различных систем обусловлено простотой, надежностью и относительно небольшой стоимостью этих машин. Основным недостатком синхронных и асинхронных с короткозамкнутым ротором электродвигателей является постоянная частота вращения ротора электродвигателя, практически не зависящая от нагрузки. Однако подавляющее большинство систем, элементами которых являются приводимые электродвигателем механизмы, работают в режимах с переменной нагрузкой. Для регулирования их производительности существуют различные способы, например распространенным в настоящее время методом регулирования производительности насосов и вентиляторов является уничтожение избыточной мощности расхода посредством клапанов и заслонок. Экономическая эффективность подобных решений крайне неудовлетворительна. С развитием силовой полупроводниковой и микропроцессорной техники стало возможным создание устройства частотного регулированияэлектроприводом, которое позволяет точно управлять скоростью и моментом электродвигателя по заданным параметрам в точном соответствии с характером нагрузки. Это в свою очередь, позволяет осуществлять точное регулирование практически любого процесса в наиболее экономичном режиме, без тяжёлых переходных процессов в технологических системах и электрических сетях. Внедрение частотного регулирования электроприводов (ЧРП) позволяет: · повысить надёжность работы оборудования и систем; · улучшить качество производимой продукции и предоставляемых услуг; · автоматизировать производство; · экономить ресурсы и энергию. |
||
|
|
Последнее изменение этой страницы: 2018-05-29; просмотров: 342. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |


 Рис.35
Рис.35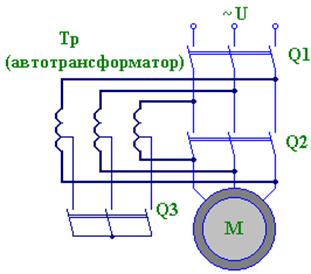 Рис.36
Рис.36 вращения вследствие изменения частоты питающего напряжения обеспечивает широкий диапазон частот вращения, но для этого необходим источник энергии, частоту и напряжение которого можно изменять. В последнее время, в связи с бурным развитием полупроводниковых элементов, используют источники энергии построенные на основе полупроводников.
вращения вследствие изменения частоты питающего напряжения обеспечивает широкий диапазон частот вращения, но для этого необходим источник энергии, частоту и напряжение которого можно изменять. В последнее время, в связи с бурным развитием полупроводниковых элементов, используют источники энергии построенные на основе полупроводников. U11ф / U1ф= f11 / f1
U11ф / U1ф= f11 / f1  М1/M
М1/M U11= U1
U11= U1