|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Поводковый механизм, тангенсный и синусоидальный механизмы.
 1-коэф.передачи для ТМ 1-коэф.передачи для ТМ
2-коэф.передачи для СМ Из графика видно, что передаточное отношение сохраняется постоянным только в небольших значениях в пределах угла поворота. Поводковые передачи.
Характеристика механизма S-зависимость расстояния. Передаточное отношение i12 связывает передаточные отношения, зависящие от угла a. Кривошипно-ползунные мех-мы.
Кривошипно-ползунный мех-м предназначен для преобразования вращательного движения кривошипа 1 в возвратно-поступательное движение ползуна 3 посредством шатуна 2. Характеристикой мех-ма является зав-ть перемещения S от угла поворота кривошипа, т.е. S=f(a). Для случая с=0 (аксиальн.) S=r[1-cosa+rsin2a/2L].
34. Фиксирующие устройства ограничения движения. Зажимные устройства. Обеспечивает неподвижное взаимное положение отдельных деталей механизма, что достигается благодаря трению. Трение между деталями 1 и 2, удерживающее установленное положение зажимного устройства, возникает под действием сил, создаваемых установочными винтами а), эксцентриком б) или хомутиком, стягиваемым винтом в). 
Винтовой ограничитель: Состоит из винта, вращающегося в подшипниках, гайки 2, перемещающейся поступательно вдоль направляющей 5, и упоров 1, которые вращаются вместе с винтом. Вращение винта оказывается возможным пока один из упоров 3 гайки 2 не коснется упоров 1. Количество оборотов однозаходного винта
|
||||
|
|
Последнее изменение этой страницы: 2018-05-27; просмотров: 457. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |


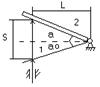 Т. и С. мех-мы применяют для преобразования нелинейного перемещения S толкателя 1 в поворотное перемещение а рычага 2 . Начальное положение рычага 2 определяется углом а0 .Считаем а положительным, если он расположен над горизонтальным положением и отриц, если наоборот. В тангенсном мех-ме (верхн рис) связь м/у положением S и другими геометрическими параметрами выражается следующей зависимостью:
Т. и С. мех-мы применяют для преобразования нелинейного перемещения S толкателя 1 в поворотное перемещение а рычага 2 . Начальное положение рычага 2 определяется углом а0 .Считаем а положительным, если он расположен над горизонтальным положением и отриц, если наоборот. В тангенсном мех-ме (верхн рис) связь м/у положением S и другими геометрическими параметрами выражается следующей зависимостью:  . В синусоидальном мех-ме длина рычага r остается неизменным, поэтому хар-ка мех-ма:
. В синусоидальном мех-ме длина рычага r остается неизменным, поэтому хар-ка мех-ма:  ;
; 
 ;
; П. передачи предназначены для преобразования м/у расположенными под углами осями.
П. передачи предназначены для преобразования м/у расположенными под углами осями. S=OK=L1*tga=L2*tgb
S=OK=L1*tga=L2*tgb
 в данном случае - дезаксиальный мех-м (аксиальный – с=0).
в данном случае - дезаксиальный мех-м (аксиальный – с=0).
 ; p – шаг нарезки винта.
; p – шаг нарезки винта.