|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Регулировка скорости вращения асинхронных двигателей ⇐ ПредыдущаяСтр 3 из 3 Скорость асинхронного двигателя можно регулировать изменением напряжения, подводимого к статору, при этом частота напряжения на двигателе не изменяется и равна стандартной частоте сети 50 Гц. Для регулирования напряжения на статоре АД в настоящее время наибольшее распространение получили тиристорные регуляторы напряжения (ТРН), которые обладают большим быстродействием, высоким КПД, небольшой стоимостью, простотой обслуживания. Трехфазная схема ТРН для регулирования напряжения на статоре АД, построенная на основе однофазных схем ТРН представлена на рис. 7, а. Она состоит из шести тиристоров VS1... VS6. В каждую фазу трехфазного ТРН включаются два тиристора по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полупериода напряжения сети U1. Тиристоры получают импульсы управления Uaот системы импульсно-фазового управления (СИФУ), которая обеспечивает их сдвиг на угол управления а в функции внешнего сигнала UуИзменяя угол управления а от 0 до 180°, можно регулировать напряжение на статоре от полного напряжения сети U1до нуля.
Рисунок 7. ТАБЛИЦА 1
Продолжение ТАБЛИЦЫ 1 
ТАБЛИЦА 2
Продолжение ТАБЛИЦЫ 2
Пример решения задачи 1. Регулирование скорости двигателя постоянного тока независимого возбуждения производится по схеме (рисунок 8). Номинальные данные двигателя: мощность Рном= 7,5 кВт; напряжение Uном= 230 В; угловая скоростьω= 126 рад/c ; ток якоря Iя.ном = 38А; сопротивление якоря Rя=0,3Ом ; постоянная двигателя с Индуктивность якорной цепи предполагается достаточной для обеспечения непрерывности тока якоря и отсутствия пульсаций. 1. В режиме выпрямления (в двигательном режиме) для угла управления α и номинального тока якоря необходимо рассчитать: момент и скорость двигателя и коэффициент мощности. 2. В режиме инвертирования (рекуперативного торможения) полярность ЭДС двигателя изменяется на противоположную, например путем реверса потока возбуждения. Для этого режима требуется найти угол управления α, при котором в якорной цепи протекает номинальный ток, а также мощность, возвращаемую в питающую сеть.
Рисунок 8 Решение 1. Режим выпрямления (двигательный режим). Определяем момент двигателя: М=с∙Ф∙Iя=1,74∙38=66,1 Н∙м Напряжение на якоре определяется по формуле: U= Для якорной цепи определяем Ея: Eя = Uя -RяIя =202,8 - 38∙0,3= 191,4 В Определяем угловую скорость: ω= Ея/сФ=191,1/1,74=110 рад/с Угловую скорость можно найти и по другому: ω= Если ток якоря не имеет пульсаций и постоянен, то ток, потребляемый из сети имеет прямоугольную форму и амплитуду 38А. Среднеквадратичное значение тока сети: I= 38A Полная мощность, отдаваемая сетью: P= UI = 260∙38 = 9880 Вт Если пренебречь потерями в преобразователе, то мощность якорной цепи двигателя: Pя= UяIя = 202,8∙38 = 7707 Вт Отсюда коэффициент мощности имеет следующее значение: КР = Рн//Р = 7707/9880 =0,78 2. Режим инвертирования (рекуперативного торможения). В момент изменения полярности ЭДС: Ея = 191,4 В Из уравнения для якорной цепи определяем: Uя =RяIя + Eяи = 38∙0,3 – 191,4 = -180 В Определяем угол управления α: α = аrсcos Мощность, преобразуемая двигателем: Pм= ЕяIя = 191,4∙38= 7273 Вт Потери мощности в сопротивлениях якоря : P=I2яRя = 382∙0,3 = 433 Вт Мощность, поступающая в сеть равна разности этих значений: Ря = Рм – Ря = 7273 – 433= 6840Вт, Или Ря = UяIя = 180∙38 = 6840 Вт Пример решения задачи 2 Трехфазный асинхронный двигатель с фазным ротором и тремя парами полюсов,
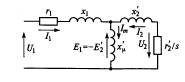
Рисунок 9 Рисунок 10
Решение: Uф=220B, Угловая скорость и скольжение равны соответственно:
Определяем момент Без учета параметров двигателя выпрямленный ток равен:
Определяем выпрямленное напряжение, которое для инвертора имеет обратный знак:
Входное напряжение переменного тока инвертора:
Так как при ХХ
откуда Скорость определяется следующими независимостями:
Отсюда:
Угол опережения при этом: Выходная мощность:
Действующее значение тока ротора, приведенное к числу витков статора:
Электрические потери в статоре
Суммарная мощность:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 345. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |

 Ф= 1,74В∙с; угол управления α=30 град;напряжение питания Uп =260 В;
Ф= 1,74В∙с; угол управления α=30 град;напряжение питания Uп =260 В;
 = 202,8 В
= 202,8 В 110 рад/с
110 рад/с 

 напряжением Uл =380В; частотой 50 Гц; включен по схеме вентильного каскада(рисунок9). имеет следующие номинальные параметры схемы замещения (рисунок10):r=0,041 Ом,r/= 0,044 Ом, x1=0,29 Ом, x2/=0,44 Ом,x12=6,,1 Ом.Отношение чисел витков фаз обмоток ротора к статорным К= w2/w1=0,9; Индуктивность Lвелика, поэтому выпрямленный ток имеет пренебрежительно малые пульсации. Отношение переменного напряжения преобразователя к питающемуn2=0,4; Момент нагрузки М=750 Н∙мпри n= 910 мин-1.Рассчитать для случая когда двигатель работает при частоте вращения n1=850 мин-1; ток в индуктивности Id ; напряжение постоянного тока Ed ; угол опережения инвертора β ; КПД η .Скорость вращения магнитного поля ω0.Потерями пренебречь.
напряжением Uл =380В; частотой 50 Гц; включен по схеме вентильного каскада(рисунок9). имеет следующие номинальные параметры схемы замещения (рисунок10):r=0,041 Ом,r/= 0,044 Ом, x1=0,29 Ом, x2/=0,44 Ом,x12=6,,1 Ом.Отношение чисел витков фаз обмоток ротора к статорным К= w2/w1=0,9; Индуктивность Lвелика, поэтому выпрямленный ток имеет пренебрежительно малые пульсации. Отношение переменного напряжения преобразователя к питающемуn2=0,4; Момент нагрузки М=750 Н∙мпри n= 910 мин-1.Рассчитать для случая когда двигатель работает при частоте вращения n1=850 мин-1; ток в индуктивности Id ; напряжение постоянного тока Ed ; угол опережения инвертора β ; КПД η .Скорость вращения магнитного поля ω0.Потерями пренебречь.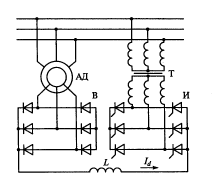
 0= 2πf/p = 2π·50/3 = 104,66 рад/с
0= 2πf/p = 2π·50/3 = 104,66 рад/с

 ·м
·м .
. .
. .
. , то:
, то: ,
, .
. ;
; ;
;
 .
. .
.
 и ротора
и ротора  :
:


