|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Основные уравнения и режимы работы двигателей постоянного тока независимого возбуждения
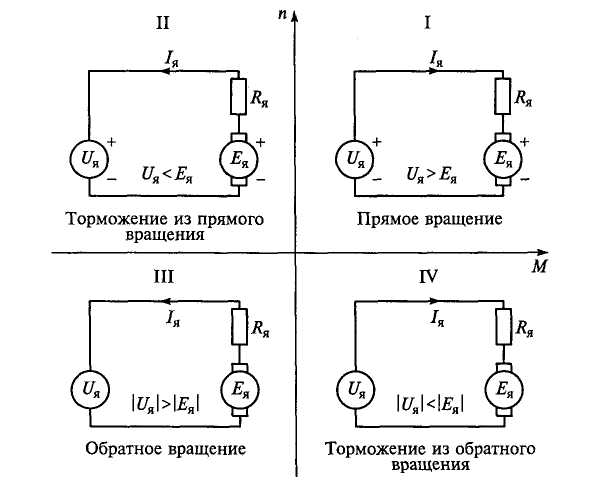
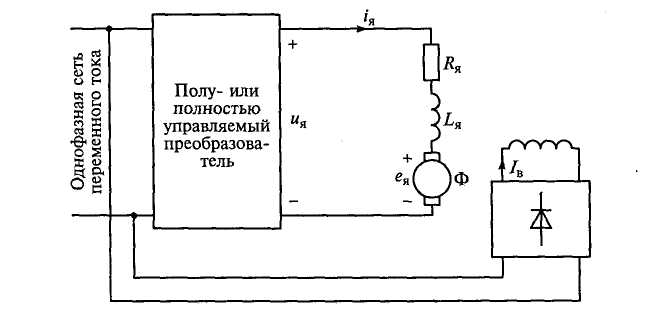
Рисунок 3. На рисунке 3 приведена схема двигателя постоянного тока независимого возбуждения ДПТ НВ при питании от выпрямителя, который может быть управляемым или полууправляемым. Цепь возбуждения двигателя питается от сети постоянного тока через диодный мост. Основные уравнения для ДПТ с независимым возбуждением выглядят так: Ток якоря ДПТ определяется его ЭДС ея, сопротивлением Rя и индуктивностью якоря Lя. ЭДС якоря выражается зависимостью: ея = сФω, где с – коэффициент, определенный конструкцией ; Ф-магнитный поток двигателя. Среднее значение ЭДС якоря: Ея = сФωср, Электромагнитный момент: М = сФiя, Среднее значение момента: Мср = сФIя, Напряжение якорной цепи двигателя можно представить так: u = Rяiя + iя Среднее значение: Uя =RяIя + Eя При этом, значение Uя в явном виде от Lя не зависит. Далее определяем выражение для средней угловой скорости двигателя: ωср=( Uя - RяIя)/сФ Согласно последней формуле скорость ДПТ можно регулировать тремя способами: изменением напряжения питания, изменением магнитного потока (тока возбуждения), изменением сопротивления в цепи якоря. На рисунке 4 показаны четыре квадранта механической характеристики двигателя постоянного тока. Квадранты I и IIIIIIV характеризуют двигательный режим работы ДПТ и прямую передачу энергии. Электрическая энергия от питающей сети черезпреобразователь поступает к электрической машине и через ее вал в виде механической энергии передается к приводному механизму.
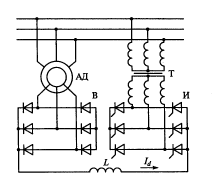
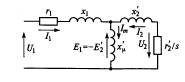
Рисунок 4. Квадранты II и IV соответствуют генераторному режиму работы ДПТ, который предполагает создание усилия на ротор двигателя для управления замедлением приводного механизма. В системе осуществляется обратная передача энергии: двигатель получает механическую энергию от приводного механизма и отдает ее в виде электрической энергии через преобразователь в питающую сеть или другому потребителю. При этом ДПТ работает в генераторном режиме.  Для вращения двигателя в прямом направлении (квадрант I) Uя, Еяи /я должны быть положительными; скорость и момент также положительными. При торможении из прямого вращения (квадрант II) двигатель вращается в прямом направлении, при этом ЭДС остается положительной. Для обеспечения отрицательного момента и рекуперации энергии ток якоря должен быть отрицательным. В этом случае питающее напряжение 1/ядолжно поддерживаться меньше, чем ЭДС Ея. При вращении в обратном направлении (квадрант III) Uя, Еяи1я отрицательны. Чтобы момент также был отрицательным, и энергия передавалась бы от источника к двигателю, ЭДС должна удовлетворять условию | Uя|> | Ея|. Полярность Еядолжна быть изменена на обратную путем изменения полярности тока возбуждения или переключением зажимов обмотки якоря. При торможении из обратного вращения (квадрант IV) UяиЕяостаются отрицательными. Для создания положительного момента и передачи энергии от двигателя к источнику ток якоря должен быть положительным. В этом случае наведенная ЭДС Еядолжна удовлетворять условию |Uя|<| Ея|. Возможность работы электропривода в одном или нескольких квадрантах определяется выбранным преобразователем. Преобразователи для регулирования скорости ДПТ подразделяются на однофазные и трехфазные. Выбор наиболее подходящей схемы для соответствующего применения преобразователя зависит от числа фаз питающей сети, мощности привода, допустимых пульсаций напряжения, необходимости изменения направления вращения и рекуперации энергии в сеть. Полууправляемый преобразователь обеспечивает работу электропривода лишь на электрических характеристиках, расположенных в одном квадранте, так как направление напряжения и тока на его выходе неизменны. Полностью управляемый преобразователь обеспечивает работу в двух квадрантах, поскольку он дает возможность изменять по направлению напряжение на якоре двигателя, однако однонаправленная проводимость тиристоров не позволяет изменить направление тока через якорь двигателя. Преобразователи с двумя комплектами тиристоров позволяют регулировать скорость двигателя во всех четырех квадрантах. Двухкомплектные схемы с полууправляемыми мостами обеспечивают работу электропривода в двух квадрантах. Задача 2Посвящена расчету параметров асинхронного двигателя при инвертировании. Трехфазный асинхронный двигатель с фазным ротором напряжением Uл ; частотой 50 Гц; включен по схеме вентильного каскада (рисунок 5).имеет следующие номинальные параметры схемы замещения (рисунок 6):r,r/, x1, x2/,x12.Отношение чисел витков фаз обмоток ротора к статорным К= w2/w1; Индуктивность L велика, поэтому выпрямленный ток имеет пренебрежительно малые пульсации. Отношение переменного напряжения преобразователя к питающемуn2; Момент нагрузки Мпри n.Рассчитать для случая когда двигатель работает при частоте вращения n1; ток в индуктивности Id ; напряжение постоянного тока Ed ; угол опережения инвертора β ; КПД η .Скорость вращения магнитного поля ω0.Потерями пренебречь.
Рисунок 5 Рисунок 6 |
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 335. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 + ея
+ ея