|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
УПРАВЛЕНИЕ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКАСтр 1 из 3Следующая ⇒ Контрольное задание Контрольное задание выдается в виде двух задач посвященных расчетам параметров двигателей с регулируемой частотой вращения, данные для решения заданы в таблицах 1,2. Номер варианта соответствует двум последним цифрам зачётной книжки, если этот номербольше 30, то необходимо отнять от данного номера 30, или число кратное тридцати, чтобыполучить номер варианта. Например: две последние цифры зачетной книжки - 76, тогда 76-2×30=16, следовательно – вариант 16. Решение задач осуществлять в соответствии с методикой,приведенной после заданий.
Задача 1.Посвящена расчету параметров двигателя в двигательном режиме и угла управления в рекуперативном режиме. Регулирование скорости двигателя постоянного тока независимого возбуждения производится по схеме (рисунок 1). Номинальные данные двигателя: мощность Рном; напряжение Uном; угловая скоростьω ; ток якоря Iя.ном ; сопротивление якоря Rя ; постоянная двигателя с Индуктивность якорной цепи предполагается достаточной для обеспечения непрерывности тока якоря и отсутствия пульсаций. 1. В режиме выпрямления (в двигательном режиме) для угла управления αи номинального тока якоря необходимо рассчитать: момент и скорость двигателя и коэффициент мощности. 2. . В режиме инвертирования (рекуперативного торможения) полярность ЭДС двигателя изменяется на противоположную, например путем реверса потока возбуждения. Для этого режима требуется найти угол управления α, при котором в якорной цепи протекает номинальный ток, а также мощность, возвращаемую в питающую сеть. 
Рисунок 1. УПРАВЛЕНИЕ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА Тиристорные преобразователи в электромеханических системах Одним из основных видов регулируемых электромеханических систем являются системы с электродвигателями постоянного тока независимого возбуждения (ДПТ НВ). Для питания якорных цепей двигателей и обмоток возбуждения двигателей и генераторов используются полупроводниковые преобразователи напряжения. В большинстве современных преобразователей используются тиристоры. Тиристорные преобразователи (ТП) напряжения переменного тока в постоянный имеют высокий КПД, малую инерционность, высокий коэффициент усиления по мощности и высокую надежность, обеспечиваемую быстродействующей защитой и блочным исполнением системы управления. Применение ТП для регулирования напряжения на якоре двигателя постоянного тока позволяет на 5... 7 % повысить КПД электропривода по сравнению с системой генератор—двигатель. Тиристорные преобразователи не содержат вращающихся частей, имеют меньшую массу, чем электромашинные преобразователи напряжения, и не требуют для своей установки дорогостоящих фундаментов. Основные недостатки ТП: низкий коэффициент мощности при глубоком регулировании выпрямленного напряжения и значительное влияние мощных преобразователей на амплитуду и форму напряжений питающей сети. Кроме того, ТП обладают меньшей помехоустойчивостью и повышенным уровнем излучаемых радиопомех по сравнению с электромашинными преобразователями. Неблагоприятное влияние на коэффициент мощности ТП оказывают высшие гармонические составляющие в кривой тока, потребляемого преобразователем из сети. Однако основная причина низкого значения коэффициента мощности ТП в режимах с глубоким регулированием заключается в сильном возрастании потребляемой преобразователем реактивной мощности при снижении выпрямленного напряжения.
Рисунок 2.
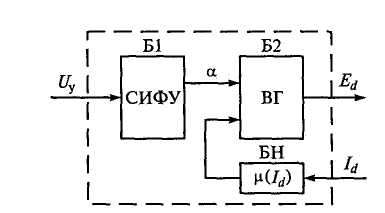
Функциональная схема ТП представлена на рисунке 1. Входной координатой ТП является напряжение управления Uу, выходной – выпрямленная ЭДС, определяемая как среднее на интервале проводимости значение в установившемся режиме Ed и в переходных процессах ed. Входной блок Б1 преобразует напряжение Uy в угол открывания тиристоров а, а выходной блок Б2 преобразует угол а в ЭДС ТП. Технически блок Б1 представляет собой систему импульсно-фазового управления (СИФУ), а блок Б2 — вентильную группу ВГ. Конструктивно вентильная группа состоит из комплекта тиристоров, предназначенных для определенного направления тока нагрузки. На выходную координату ТП оказывает влияние возмущающее воздействие — ток нагрузки Id, который через функциональный блок нагрузки БН поступает на вход блока Б2. Влияние Idна Edпроявляется только в режиме прерывистых токов. В режиме непрерывных токов ЭДС ТП является функцией только угла открывания. |
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 321. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 Ф; угол управления α;напряжение питанияUп;
Ф; угол управления α;напряжение питанияUп;