|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
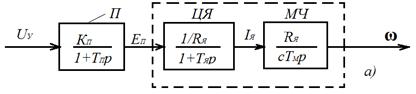
Система регулирования скоростиУпрощенная структурная схема системы ТП—ДПТ НВ представлена на рис. 3.66, а, где элементы привода — преобразователь П и ДПТ М представлены своими передаточными функциями, kn и Тп — коэффициент усиления и постоянная времени преобразователя; Тя и Тм - постоянные времени соответственно цепи ДПТ и механической части привода. Расчет и проектирование схемы управления электроприводом по принципу последовательной коррекции начинают с построения контура тока. Для этого в цепь управления вводится регулятор тока РТ (рис. 3.66, б) с неизвестной пока передаточной функцией WP,T) на вход ко торого подаются сигналы задающей U З.Т и отрицательной обратной связи по току UО.Т. =kT I. Искомая передаточная функция регулятора тока WP.T ищется путем приравнивания желаемой передаточной функции разомкнутого оптими зированного контура (3.146) и передаточной функции Wраз.Т образованной регулятором тока РТ, преобразователем П и якорем ЦЯ (П и ЦЯ образуют объект регулирования, для контура тока с передаточной функцией W0.Т),-
Рис. 3.66. Система регулирования скорости, построенная по принципу последовательной коррекции: ' а— схема электропривода; б — образование контура тока; в— образование «контура скорости
откуда получаем
Обычно принимают постоянную времени контура тока Тогда передаточная функция регулятора тока принимает вид
,где Из (3.150) видно, что регулятор, тока для рассматриваемого случая представляет собой пропорционально-интегральный (ПИ) регулятор. 
Т.е. замкнутый контур представляет собой систему второго порядка с малой постоянной времени Тп. Другими словами, введение регулятора тока с передаточной функцией, вида (3.150) позволило скомпенсировать большую постоянную времени цепи якоря Тя и обеспечить оптимальный характер переходных процессов с отмеченными ранее показателями. После расчета .контура тока производится расчет и построение контура скорости. Для этого в систему вводятся регулятор скорости PC с неизвестной пока передаточной функцией Wр,c и отрицательная обратная связь по скорости с коэффициентом kс (рис. 3.66, в). После образования контура скорости контур тока, представленный на рис. 3.65, в передаточной, функцией W3aмT, оказался внутренним (подчиненным) для контура скорости, так как управляющий сигнал Uзт на регулятор тока поступает c выхода регуляторf скорости. Передаточную функцию регулятора скорости определяют, как и для регулятора тока, по передаточной функции объекта регулирования скорости W0C состоящему из контура тока и механической части привода, и желаемой передаточной функции разомкнутой системы регулирования скорости W раз,с. Если пренебречь в (3.151) членом второго порядка 2TП2p2 то передаточная функция W0,c примет вид
Желаемая передаточная функция разомкнутой системы W раз,с. oпределяется выражением (3.146) при подстановке в него k о,c=kс и Тм =2ТП
Разделив выражение (3.153) на (3.152), получим искомую передаточную функцию регулятора скорости Wpc
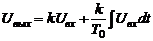
б) Техническая реализация систем подчиненного регулирования Широкому распространению систем подчиненного регулирования способствует помимо отмеченных достоинств выпуск промышленностью унифицированной блочной системы регуляторов (УБСР). Эта система имеет несколько ветвей: аналоговую, выполняемую; на обычных элементах электроники УБСР-А и на интегральных микросхемах УБСР-АИ/ и цифровую — на обычных элементах УБСР-Д и на интегральных микросхемах УБСР-ДИ Аналоговая ветвь УБСР-А состоит из небольшого количества элементов— транзисторных усилителей постоянного тока, датчиков регулируемых параметров и командных задающих устройств, функциональных преобразователей и источников питания. В системе принят электрический сигнал постоянного тока напряжением 0 ±24 В, 0 ±10 мА, что позволяет собирать элементы системы в разных сочетаниях и выполнять их на базе серийных транзисторов общего назначения Основным элементом системы, с помощью которого выполняются схемы различных регуляторе электропривода, служит операционный усилитель постоянного тока УПТ-3 с высоким коэффициентом усиления (более 1000) и относительно малым дрейфом нуля Вторым типом усилителя системы УБСР-А является усилитель мощности У ПТ-5, предназначенный для работы с внешними исполнительными устройствами с параметрами входных сигналов, отличающимися от принятых в системе. Кроме того, усилитель УПТ-5 можно использовать в качестве операционного. При введении соответствующих обратных связей операционный усилитель может обеспечивать масштабное преобразование (усиление или ослабление) входной величины, ее интегрирование или дифференцирование, а также осуществлять пропорционально-интегральный (ПИ) и интегрально-пропорционально-дифференциальный (ИПД) законы управления электроприводом Для примера на рис. 3.68 показаны схемы П- и ПИ-регуляторов, собранных на базе операционного усилителя ОУ. Сигнал на выходе П-регулятора (рис. 3.68, а) пропорционален входному, т. е. Uвых=kвх, где k=R o.c/Ru откуда передаточная функция П-регулятора
Сигнал на выходе ПИ-регулятора (рис. 3.68, б) пропорционален входному сигналу и интегралу от входного сигнала, т. е
где – T0 =Roc C, k= Roc / R1 Передаточная функция ПИ-регулятора, соответствующая выражению (3.158), имеет вид
где – TИ =Т0 / k = R1 C,
Рассмотрим порядок расчета параметров регуляторов системы с подчиненным регулированием координат, реализуемых на базе операционных усилителей. Основой этого расчета является условие эквивалентности требуемых передаточных функций регуляторов тока (3.150) и скорости (3.154) и передаточных функций ПИ-регулятора (3.159) и П регулятора (3.157). Для реализации передаточной функции регулятора тока вида (3.150) параметры ПИ-регулятора (рис. 3.68,6) должны удовлетворять следующим условиям,
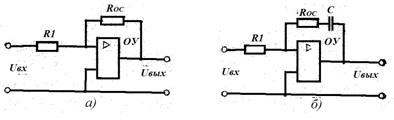
Рис. 3.68. К технической реализации электропривода с подчиненным регулированием координат а — схема П-регулятора скорости; б — схема ПИ-регулятора тока; в— структурная схема электропривода которые после несложных преобразований можно представить в виде
Для реализации передаточной функции регулятора скорости вида (3,154) параметры П-регулятора (рис. 3.68, а) должны удовлетворять следующим условиям k =Roc-/R1=kTcTM/(4kcTПRя) = kp,c. (3.162) На рис. 3.68, в приведена структурная схема электропривода постоянного тока с подчиненным регулированием координат. Двигатель М получает питание от управляемого вентильного преобразователя УП. На валу ДПТ установлен тахогенератор BR, вырабатывающий сигнал обратной связи по скорости U0,с=kсо. Этот сигнал поступает на вход регулятора скорости PC вместе с сигналом задания скорости U 3,с Сигнал обратной связи по току U0,T = k T I вырабатывает датчик тока ДТ который, в свою очередь, получает сигнал с резистора Rш, включенного в цепь якоря ДПТ. Сигнал U0,т поступает на вход регулятора тока вместе с сигналом задания тока U3,т, снимаемого с выхода PC, Выходной сигнал РТ Uу поступает в СИФУ преобразователем, которая осуществляет управление его вентилями. Ограничение тока якоря обеспечивается стабилитронами VI, V2. Задающее напряжение сигнала скорости U3C может поступать на вход системы от задатчика интенсивности или другого источника задающего сигнала
|
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 436. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |





 равной небольшой (около 0,01 c) постоянной времени преобразователя Тя
равной небольшой (около 0,01 c) постоянной времени преобразователя Тя (3.150)
(3.150) =
=  /RЯ - постоянная времени регулятора.
/RЯ - постоянная времени регулятора. (3.151)
(3.151) (3.152)
(3.152) (3.153)
(3.153)



 (3.361)
(3.361)