|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Конструкция и принцип действия двигателя постоянного тока.В качестве исполнительных элементов во многих устройствах автоматики: в радиоэлектронных, оптических, механических, а также и портативных аппаратах, снабжённых автономными источниками электрической энергии, широко используются электродвигатели постоянного тока. Эти двигатели имеет ряд преимуществ перед другими видами ИЭ: линейность механических характеристик (ДПТ), хорошие регулировочные свойства, большой пусковой момент, высокое быстродействие, большой диапазон по мощность различных типов ДПТ и хорошие весогабаритные показатели. Основным недостатком этих двигателей является наличие щеточно-коллекторного устройства, ограничивающего срок службы ДПТ и удорожающего обслуживания ДТП, вносящего дополнительные потери, являющегося источником помех и практически исключающего возможность использования ДПТ в условиях агрессивных и взрывоопасных сред.
Конструкция ДПТ. Конструктивно ДПТ состоит из статора (неподвижной части) и ротора или якоря (вращающейся части), помещённого внутри статора. Упрощённо конструкцию машины можно пояснить с помощью рис.61. Статор состоит из стальной станины 1, на внутренней поверхности которой расположены главные полюса, состоящие из сердечников 2 и катушек возбуждения 3. В нижней части сердечника полюса имеется полюсный наконечник 4, который обеспечивает
Рис. 61. Конструкция ДПТ.  Ротор( якорь ) ДПТ состоит из сердечника 5, обмотки якоря 6, коллектора 7 и вала 8. Сердечник 5 представляет собой цилиндр, набранный из штампованных листов электротехнической стали, с отверстием под вал двигателя и с пазами, в которых укладываются проводники обмотки якоря. Коллектор 7 – цилиндр, набранный из медных пластин трапециевидного сечения, изолированных электрически друг от друга и от вала двигателя.
Рис. 62. Схема обмотки якоря ДПТ. Обмотка, схема которой приведена на рис. 62, содержит 4 секции, каждая из которых состоит из активных сторон 1, располагающихся в пазах сердечника и лобовых частей 2, посредством которых активные стороны секций соединяются между собой и с коллекторными пластинами. Чтобы ЭДС, наводимые в активных сторонах секций складывались, необходимо расположить активные стороны одной секции в пазах сердечника, отстоящих друг от друга на расстоянии полюсного деления t. Ротор, приведенный на рис. 6.1, имеет 8 активных проводников, причем секции образуют проводники 1 – 5, 2 – 6, 3 – 7 и 4 – 8. 6.2.2. Электромагнитный момент ДПТ. Принципдействия ДПТ основан на взаимодействии тока проводников обмотки якоря с магнитным полем возбуждения, в результате чего на каждый проводник обмотки якоря действует электромеханическая сила, а совокупность сил, действующих на все активные проводники обмотки, образует электромагнитный момент машины. Пусть у нас есть рамка с током, помещенная в поле постоянного магнита. Рис. 63.
На каждый проводник с током, помещенный в магнитное поле машины действует электромагнитная сила:
где l- длина активного проводника, B - индукция в данной точке воздушного зазора, i – ток в проводнике. Пусть каждая сторона рамки содержит число параллельных ветвей обмотки 2а. Тогда ,если через щетки машины протекает ток Iя , называемый током якоря, то через каждый проводник обмотки якоря протекает ток:
Совокупность сил действующих на все N проводников рамки приводит к возникновению результирующего электромагнитного момента машины: Рис. 63. Принцип действия ДПТ.
Пусть, у рассматриваемого ДПТ имеется 2р полюсов (в большинстве случаев в микромашинах 2р = 2, т. е. число пар полюсов р = 1). Расстояние по окружности якоря между серединами смежных полюсов называется полюсным делением t . Очевидно, что
Т.к. произведение l*r есть площадь, которую пронизывает полезный магнитный поток полюса Ф, то величина этого потока может быть определена как Ф=Вср*l*r. После подстановки получим:
где Таким образом, электромагнитный момент, развиваемый ДПТ пропорционален магнитному потоку Ф и току якоря машины Iя. При вращении ротора (якоря) должно выполняться условие равенства моментов: М=Мн+Мп+Мд, где Мн – момент полезной нагрузки, Мп – момент потерь и
6.2.3. Электродвижущая сила ДПТ. При вращении ротора ДПТ в каждом активном проводнике обмотки якоря, пересекающем нормальные к его поверхности силовые линии магнитного поля полюсов наводятся ЭДС. Направление ЭДС определяется по правилу правой руки; величина ЭДС определяется выражением e=Blv, где l длина активного проводника, B - индукция в данной точке воздушного зазора, v - линейная скорость перемещения проводника относительно линий нормальной к поверхности ротора индукции. При этом при вращении ротора ЭДС в каждом проводнике является периодической переменной во времени величиной. ЭДС якоря машины равна алгебраической сумме ЭДС проводников, образующих одну параллельную ветвь машины. Каждая параллельная ветвь представляет собой группу последовательно соединённых секций, ток в которых имеет одинаковое направление. Для простой петлевой обмотки число параллельных ветвей 2а всегда равно числу полюсов 2р. Таким образом, для двухполюсной машины обмотка якоря по отношению к щёткам имеет две параллельных ветви, ЭДС в проводниках которых направлены согласно. Несмотря на то, что при вращении ротора всё новые и новые проводники будут образовывать параллельные ветви, направление ЭДС в проводниках, а также направление суммарной ЭДС параллельной ветви или ЭДС якоря Ея остаётся неизменной при неизменном направлении вращения ротора. Поскольку число активных проводников параллельной ветви весьма велико, то, несмотря на пульсирующий характер ЭДС каждого из проводников суммарная ЭДС (E) остается практически постоянной при постоянной скорости вращения ротора. В таком случае можно воспользоваться значением средней индукции в воздушном зазоре машины Вср и найти ЭДС.
Зная, что линейная скорость равна v=w∙R==w∙d/2, где w - угловая частота вращения ротора в рад/с, d - диаметр ротора, получим
Величина полезного магнитный поток полюса Ф может быть определена как, где Тогда
Для системы СИ обе конструктивные постоянные численно совпадают: См = Се.Таким образом, ЭДС якоря машины пропорциональна величине магнитного потока полюсов и частоте вращения ротора. При постоянном магнитном потоке Ф ЭДС якоря машины пропорциональна частоте вращения ротора, т.е. Способы регулирования ДПТ Скорость вращения ДПТ может осуществляться следующим образом: 1) По возбуждению. Изменяя ток обмотки возбуждения (магнитный поток машины) через управляемый выпрямитель, импульсным способом или с помощью дополнительных сопротивлений, меняем насыщение магнитной системы. Изменение магнитного потока производится только вниз, критический момент развиваемый двигателем падает, а скорость ω0 возрастает, механическая характеристика такой машины является мягкой. 2) По якоря (с помощью дополнительных сопротивлений, через управляемый выпрямитель или импульсным способом) изменяя ток якоря. Изменение тока якоря производится только вниз, критический момент развиваемый двигателем не меняется, скорость ω0 не меняется, а механическая характеристика такой машины является жесткой. 3) По цели управления (момент на валу двигателя, скорость, время) Для реализации этих задач могут использоваться электромеханические системы и электронные системы управления. Электромеханические системы в основном используются для разгона и торможения двигателя. Электронные для стабилизации и регулирования параметров электропривода (момент, скорость), при этом в схемах управления электроприводом, используются положительные и отрицательные обратные связи. |
||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 423. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |
 нужное распределение магнитной индукции в воздушном зазоре машины. К станине с торцевых сторон прикреплены подшипниковые щиты ( на рис. 61 не показаны ), к одному из которых прикреплены щёткодержатели с металлографитовыми щётками 9.
нужное распределение магнитной индукции в воздушном зазоре машины. К станине с торцевых сторон прикреплены подшипниковые щиты ( на рис. 61 не показаны ), к одному из которых прикреплены щёткодержатели с металлографитовыми щётками 9. Обмотка якоря машины представляет собой замкнутую систему проводников, уложенных и укреплённых в пазах сердечника 5. Она состоит из секций (катушек), выводы которых соединены с двумя коллекторными пластинами. У микромашин обычного исполнения с одной парой полюсов на статоре обмотка якоря представляет собой простую петлевую обмотку (схема рис.62), при построении которой выводы секций обмоток присоединяются к двум соседним коллекторным пластинам, а число секций обмотки и число коллекторных пластин коллектора одинаково.
Обмотка якоря машины представляет собой замкнутую систему проводников, уложенных и укреплённых в пазах сердечника 5. Она состоит из секций (катушек), выводы которых соединены с двумя коллекторными пластинами. У микромашин обычного исполнения с одной парой полюсов на статоре обмотка якоря представляет собой простую петлевую обмотку (схема рис.62), при построении которой выводы секций обмоток присоединяются к двум соседним коллекторным пластинам, а число секций обмотки и число коллекторных пластин коллектора одинаково.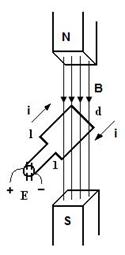
 ,
, .
. .
. , где d– диаметр рамки.
, где d– диаметр рамки. или
или  ,
, это - электромагнитная конструктивная постоянная машины.
это - электромагнитная конструктивная постоянная машины. - динамический момент. Динамический момент равен нулю в статике, больше нуля при разгоне двигателя и меньше при торможении.
- динамический момент. Динамический момент равен нулю в статике, больше нуля при разгоне двигателя и меньше при торможении. , также
, также  и
и  .
.
 ,
, , где
, где  - электрическая конструктивная постоянная машины.
- электрическая конструктивная постоянная машины. , что дает возможность использовать такую машину в качестве датчика частоты вращения или тахогенератора.
, что дает возможность использовать такую машину в качестве датчика частоты вращения или тахогенератора.