|
Студопедия КАТЕГОРИИ: АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция |
Технические характеристики прибора· Цифровые входы кол-во 8-12 · Дискретные выходы кол-во 4 н.о. -8 н.о. · Установившийся ток при максимальном напряжении для цепи постоянного тока, А, не более 3 (при нагрузке типа DC-13*) · для цепи переменного тока, А, не более 5 при cos>0,95 (1А при нагрузке АC-15 · Время переключения из состояния «логического нуля» в состояние «логической единицы» и обратно, мс, не более 10 · Количество ФБ в программе, не более 63 · Среда программирования OWEN Logic, · Преобразователи для программирования ПР-КП10, ПР-КП20 Рабочий режим работы прибора состоит из постоянного повторения следующей последовательности, также называемой рабочим циклом: − Начало цикла. − Чтение состояния входов. − Выполнение кода пользовательской программы. − Запись состояния выходов. − Переход в начало цикла. В начале цикла прибор производит физическое чтение входов. Считанные значения копируются в область памяти входов. Далее выполняется код пользовательской программы, которая работает с копией значений входов. После выполнения пользовательской программы физические выходы прибора приводятся в соответствие с расчетными значениями.
Рисунок 2.3 – Алгоритм запуска прибора
Рис.2.4. Внешний вид программируемого реле. 
Рис. 2.5. Схема подключения нагрузки к программируемому реле.
Рис. 2.6. Схема подключения датчиков (типа сухой контакт) к программируемому реле
Рис. 2.7. Схема подключения датчиков (типа полупроводниковый контакт) к программируемому реле Глава 3 Исполнительные элементы автоматики Классификация исполнительных устройств: · по типу входного сигнала (дискретные и пропорциональные); · по типу используемой энергии (электромеханические, электрические, гидравлические, пневматические); · по типу выходного сигнала (дискретные и пропорциональные) Пневматический привод Современные системы управления технологическими процессами содержат множество пневматических исполнительных устройств это пневмодвигатели, пневмоцилиндры, которые работают через пневмораспеделители, управляемые электромагнитными катушками. Достоинствами пневматического привода является простота, энергетическая экономичность, мягкость работы, и при использовании современных материалов долговечность. Схемы управления пневматикой (дискретный выходной уровень) могут сдержать датчики положения или должны учитывать время движения пневматического цилиндра и время подхода объекта к пневматической задвижке. Цилиндры фирмы VESTA, которые используются в лабораторном комплексе имеют дину хода 50 мм и диаметр цилиндра 20мм. расход воздуха через цилиндр при двустороннем действии определяется по формуле
где Q-потребление воздуха, л/мин; P-давление воздуха кг/см²; d-диаметр цилиндра дм; l-длина хода штока дм; N-число изменений состояния;
Рис. № 3.1 Конструкция пневматического цилиндра. Пневматические цилиндры VESTA серии DVM соответствуют требованиям стандарта ISO 6432 и выпускаются в версиях с величиной диаметра 12, 16, 20 и 25 мм. Они снабжены механическими демпферами с обеих сторон, оборудованы магнитным поршнем и имеют удобную разборную конструкцию. Возможно изготовление цилиндров двухстороннего действия со сквозным штоком, а так же пневмоцилиндров одностороннего действия с фронтальной или задней возвратной пружиной. Схема работы клапана приведена на рис. № 3.2. Принцип работы клапана приведен на рисунках № 3.3.
Принцип работы клапана приведен на рисунках №3 и №4 - ниже.
Если на цилиндре установлены герконовые датчики положения, то магнитный поршень укажет на положение поршня. В этом случае неопределенность положения будет исключена. Если нет датчиков положения поршня в системе, тогда необходимо в программе работы пневматической системы учитывать время хода поршня с учетом демпфирования. Демпфирование в цилиндрах может быть двух типов: первое это с использованием смягчающих пружин на концах пневматических камер; второе с использованием ниппеля, который сужает проходное сечение для выпуска воздуха, когда поршень достигнет некоторой точки, где поршень закроет основное отверстие и откроет уменьшенное регулируемое. Определим время хода цилиндра в первом случае для нашего устройства. Если учесть что демпфирующие пружины работают только в конце камер, тогда время хода определится как
где l-длина хода штока, Ускорение движения поршня определятся разницей сил между пневматической силой действующей на поршень и силой сопротивления, определяемой приведенным весом поршня и створки
где
Сложив время хода поршня, время срабатывания электромагнитного клапана (по справочнику) и добавив время демпфирования – получим полное время хода поршня (штока). Время срабатывания клапана (распределителя) по паспортным данным 30-20 Гц т.е. не более 50 ms.
Пневмоклапаны Такие приводы широко используются в машинах и установках, выполняющих самые разные задачи. Они знамениты тем, что, будучи однажды установленными, работают всегда. Использование запатентованного наполнителя, который не препятствует ходу шпинделя, оптимизирует потребление электроэнергии. Срок службы этих приводов очень велик, так как все пластиковые компоненты производятся на заводе методом литья под давлением и монтируются практически полностью автоматически. Высокое качество внутренней поверхности цилиндра и гибкое N-образное уплотнение являются основными предпосылками износостойкости. Большой выбор диаметров (40 мм, 50 мм, 63 мм, 80 мм, 100 мм, 125 мм, 175 мм, 225 мм). Приводы для стандартных сфер применения выполнены из полиамида (ПА), а для высокотемпературных зон или процессов, требующих высокой химической устойчивости, - из полифенилсульфида (ПФС). Приводы в исполнении н/о, н/з или без пружины вращаются относительно арматуры, обеспечивая тем самым оптимальное положение пневмоподключений, исходя из особенностей установки.
Рис 3.5. Схема клапана с пневмоприводом
Рис 3.6. Схема пневмопривода Гидравлический привод Гидравлический привод (гидропривод) — совокупность устройств, предназначенных для приведения в движение машин и механизмов посредством гидравлической энергии. Гидропривод представляет собой своего рода «гидравлическую вставку» между приводным двигателем и нагрузкой (машиной или механизмом) и выполняет те же функции, что и механическая передача (редуктор, ремённая передача, кривошипно-шатунный механизм и т. д.). Функции гидропривода Основная функция гидропривода, как и механической передачи,— преобразование механической характеристики приводного двигателя в соответствии с требованиями нагрузки (преобразование вида движения выходного звена двигателя, его параметров, а также регулирование, защита от перегрузок и др.). Другая функция гидропривода — это передача мощности от приводного двигателя к рабочим органам машины (например, в одноковшовом экскаваторе — передача мощности от двигателя внутреннего сгорания к ковшу или к гидродвигателям привода стрелы, к гидродвигателям поворота башни и т.д.). В общих чертах, передача мощности в гидроприводе происходит следующим образом: 1. Приводной двигатель передаёт вращающий момент на вал насоса, который сообщает энергию рабочей жидкости. 2. Рабочая жидкость по гидролиниям через регулирующую аппаратуру поступает в гидродвигатель, где гидравлическая энергия преобразуется в механическую. 3. После этого рабочая жидкость по гидролиниям возвращается либо в бак, либо непосредственно к насосу. Виды гидроприводов Гидроприводы могут быть двух типов: гидродинамические и объёмные. · В гидродинамических приводах используется в основном кинетическая энергия потока жидкости (и соответственно скорости движения жидкостей в гидродинамических приводах велики в сравнении со скоростями движения в объёмном гидроприводе). · В объёмных гидроприводах используется потенциальная энергия давления рабочей жидкости (в объёмных гидроприводах скорости движения жидкостей невелики — порядка 0,5-6 м/с). Объёмный гидропривод — это гидропривод, в котором используются объёмные гидромашины (насосы и гидродвигатели). Объёмной называется гидромашина, рабочий процесс которой основан на попеременном заполнении рабочей камеры жидкостью и вытеснении её из рабочей камеры. К объёмным машинам относят, например, поршневые насосы, аксиально-поршневые, радиально-поршневые, шестерённые гидромашины и др. Одна из особенностей, отличающая объёмный гидропривод от гидродинамического, — большие давления в гидросистемах. Так, номинальные давления в гидросистемах экскаваторов могут достигать 32 МПа, а в некоторых случаях рабочее давление может быть более 300 МПа, в то время как гидродинамические машины работают обычно при давлениях, не превышающих 1,5—2 МПа. Объёмный гидропривод намного более компактен и меньше по массе, чем гидродинамический, и поэтому он получил наибольшее распространение. В зависимости от конструкции и типа входящих в состав гидропередачи элементов объёмные гидроприводы можно классифицировать по нескольким признакам. По характеру движения выходного звена гидродвигателя Гидропривод вращательного движения, когда в качестве гидродвигателя применяется гидромотор, у которого ведомое звено (вал или корпус) совершает неограниченное вращательное движение; Гидропривод поступательного движения у которого в качестве гидродвигателя применяется гидроцилиндр — двигатель с возвратно-поступательным движением ведомого звена (штока поршня, плунжера или корпуса); Гидропривод поворотного движения когда в качестве гидродвигателя применён поворотный гидродвигатель, у которого ведомое звено (вал или корпус) совершает возвратно-поворотное движение на угол, меньший 270° По возможности регулированияЕсли скорость выходного звена (гидроцилиндра, гидромотора) регулируется изменением частоты вращения двигателя, приводящего в работу насос, то гидропривод считается нерегулируемым. Регулируемый гидропривод в котором в процессе его эксплуатации скорость выходного звена гидродвигателя можно изменять по требуемому закону. В свою очередь регулирование может быть: · дроссельным · объёмным · объёмно-дроссельным. Регулирование может быть: ручным или автоматическим. В зависимости от задач регулирования гидропривод может быть: · стабилизированным · программным · следящим (гидроусилители). Саморегулируемый гидропривод автоматически изменяет подачу жидкости по фактической потребности гидросистемы в режиме реального времени (без фазового сдвига). |
||||
|
|
Последнее изменение этой страницы: 2018-05-10; просмотров: 383. stydopedya.ru не претендует на авторское право материалов, которые вылажены, но предоставляет бесплатный доступ к ним. В случае нарушения авторского права или персональных данных напишите сюда... |








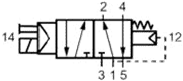 Рис.№ 3.2.
Рис.№ 3.2. Рис №3.3 Напряжение на катушку не подано.
Рис №3.3 Напряжение на катушку не подано.
 Рис №3.4 Напряжение подано на катушку.
Рис №3.4 Напряжение подано на катушку.

 - ускорение движения поршня
- ускорение движения поршня
 -сила давления на поршень; Р - давление воздуха, S - площадь поршня;
-сила давления на поршень; Р - давление воздуха, S - площадь поршня; - коэффициент приведения силы тяжести створки к штоку цилиндра через плечи сил относительно оси вращения;
- коэффициент приведения силы тяжести створки к штоку цилиндра через плечи сил относительно оси вращения; - соответственно длины плеч от оси вращения центра тяжести створки и центра крепления штока цилиндра;
- соответственно длины плеч от оси вращения центра тяжести створки и центра крепления штока цилиндра;  - вес створки,
- вес створки,  - вес поршня.
- вес поршня.
